目标在回路相干合成系统及其相位控制方法
1.本发明主要涉及到高功率激光技术领域,尤其是一种目标在回路相干合成系统及其相位控制方法。
背景技术:
2.基于主振荡器功率放大(英文名称为masteroscillator power amplifier,简称mopa)的激光阵列相干合成技术能够实现合成孔径发射,增加系统发射口径,减小激光的传输发散角。利用目标在回路,还能通过倾斜相位和活塞相位控制,实现对大气湍流的补偿,在激光通信、激光雷达和定向能技术等领域有广泛的应用前景。
3.图1为现有技术中的目标在回路激光相干阵列的结构示意框图。该系统主要包含种子激光101、激光分束器102、多个相位调制器103、多个激光放大器104、多个自适应激光准直器107、接收望远镜109、光电探测器106、倾斜控制电路110和活塞相位控制电路111。种子激光101发射的激光经激光分束器102进行分束后,各束激光分别进入相位调制器103。各相位调制器103分别与各对应的激光放大器104光路连接。各激光放大器104分别与自适应激光准直器107光路连接。各自适应激光准直器107出射的激光经过大气湍流112传输后达到目标113。接收望远镜109接收目标散射回来的散射光,散射光入射到光电探测器106。光电探测器106将探测到的光信号转换为电信号,并传输到倾斜控制电路110和活塞相位控制电路111中。倾斜控制电路110运行控制算法,根据输入信号作为反馈信号,根据算法产生输出信号,对各自适应激光准直器施加控制,对大气湍流引起的倾斜相差进行校正。活塞相位控制电路111运行控制算法,根据输入信号作为反馈信号,根据算法产生输出信号,对各相位调制器施加控制,对激光放大器和大气湍流引起的活塞相差进行校正。通过对倾斜相差和活塞相差的校正,能够使激光阵列在目标处实现相干合成,使目标处的激光能量达到最大。
4.但是,由于采用远场目标的散射光等作为反馈信号,当改变激光阵列的相位和倾斜等控制参量之后,新的激光阵列需经过一定距离的传输达到目标,等散射的激光信号返回激光发射位置,才能获得反馈信号,最后根据反馈信号的变化修正控制参量。因此,自适应控制的单次迭代时间大于激光在反射处和目标处的往返时间。激光放大器中的活塞相位噪声的频率通常较高,当激光传输距离较远时,活塞相位的控制速率难以满足大数目激光阵列的要求。
技术实现要素:
5.针对现有技术存在的技术问题,本发明提出一种目标在回路相干合成系统及其相位控制方法,以克服现有系统中相位控制速率不足的问题。
6.为实现上述目的,本发明采用的技术方案如下:目标在回路相干合成系统,包括:种子激光器,输出种子激光;
种子激光分束光路,将种子激光分为2路,其中一路进一步分束为n路后输入一级光路,另一路进一步分束为n路后输入二级光路;一级光路,将输入的n路子激光分别进行相位调制、功率放大,相位调制、功率放大后的各路子激光的一部分通过n个自适应激光准直器输出激光阵列发射到目标,各路子激光的另一部分作为探测子激光输出;二级光路,将输入的n路子激光分别进行相位调制后对应耦合入一级光路的各子激光光路中;一级活塞相位控制模块,利用n个第一光电探测器探测一级光路输出的n路探测子激光,据此产生对应的一级活塞相位控制信号,对一级光路中各对应的相位调制器施加控制,进而对一级光路中激光放大器中的高频活塞相位噪声进行校正;二级活塞相位控制模块,利用望远镜接收激光阵列发射到目标后散射回来的散射光,利用第二光电探测器探测接收望远镜接收到的散射光强,据此产生倾斜相位控制信号和二级活塞相位控制信号,倾斜相位控制信号对一级光路中的各自适应激光准直器施加控制,二级活塞相位控制信号对二级光路中各相位调制器施加控制,进而对大气湍流引起的倾斜相差、活塞相差进行校正。
7.进一步地,本发明中所述种子激光分束光路包括1
×
2激光分束器、第一1
×
n激光分束器、第二1
×
n激光分束器,种子激光源连接1
×
2激光分束器的输入端口,1
×
2激光分束器的两个输出端口,分别为第一输出端口和第二输出端口,1
×
2激光分束器的第一输出端口、第二输出端口分别连接第一1
×
n激光分束器的输入端口和第二1
×
n激光分束器的输入端口。本发明中对于1
×
2激光分束器的分光比没有严格要求,本领域技术人员可以根据实际情况以及需求灵活调整。
8.进一步地,本发明中所述一级光路包括n条子激光处理路径,第i条子激光处理路径上依次设有第i个第一相位调制器、第i个激光放大器、第i个2
×
2光纤耦合器和第i个自适应激光准直器,其中各2
×
2光纤耦合器均具有四个端口,i=1,2,...n;n个自适应激光准直器输出的激光阵列发射到目标。
9.所述2
×
2光纤耦合器,当激光从2
×
2光纤耦合器的第一端口输入时,大部分功率的激光从2
×
2光纤耦合器的第二端口输出,其他小部分功率的激光从2
×
2光纤耦合器的第四端口输出;当激光从2
×
2光纤耦合器的第三端口输入时,大部分功率的激光从2
×
2光纤耦合器的第四端口输出。
10.进一步地,本发明中所述第i个2
×
2光纤耦合器的第一端口连接第i个激光放大器,第i个2
×
2光纤耦合器的第二端口连接第i个自适应激光准直器;一级活塞相位控制模块包括n个第一光电探测器和n个一级活塞相位控制单元,第i个2
×
2光纤耦合器的第四端口连接第i个第一光电探测器,第i个第一光电探测器连接第i个一级活塞相位控制单元,第i个一级活塞相位控制单元连接第i个第一相位调制器。
11.进一步地,本发明中所述二级光路中输入的第i路子激光分别对应输入到第i个第二相位调制器,第i个第二相位调制器的另一端连接第i个2
×
2光纤耦合器的第三端口。
12.进一步地,本发明中所述二级活塞相位控制模块包括望远镜、第二光电探测器、倾斜控制单元和二级活塞相位控制单元,所述第二光电探测器位于望远镜的探测焦平面处。
13.望远镜用于接收激光阵列发射到目标后散射回来的散射光,第二光电探测器探测
接收望远镜接收到的散射光强,第二光电探测器连接倾斜控制单元和二级活塞相位控制单元;倾斜控制单元连接n个自适应激光准直器,基于第二光电探测器输出的电信号产生倾斜相位控制信号,对各个自适应激光准直器施加控制,对大气湍流引起的倾斜相差进行校正;二级活塞相位控制单元连接n个第二相位调制器,基于第二光电探测器输出的电信号产生二级活塞相位控制信号,对n个第二相位调制器施加控制,使望远镜接收到的散射光强达到最优,实现对大气湍流引起的活塞相差的校正。
14.本发明中一级活塞相位控制单元、二级活塞相位控制单元上均预先加载有优化算法,通过优化算法产生相位控制信号并输出到对应的相位调制器,本发明中的优化算法不限,可以采用现有技术中各种相位控制优化算法,如单抖动法、spgd法等等。
15.所述的倾斜控制单元运行预先加载的控制算法,以第二光电探测器输出的电信号作为反馈,产生倾斜相位控制信号,对各个自适应激光准直器施加控制,对大气湍流引起的倾斜相差进行校正。
16.所述的二级活塞相位控制单元上均预先加载有优化算法,以第二光电探测器输出的电信号作为反馈,产生二级活塞相位控制信号,对n个第二相位调制器施加控制,使望远镜接收到的散射光强稳定到最大值即达到最优,实现对大气湍流引起的活塞相差的校正。
17.基于上述提供的目标在回路相干合成系统,本发明提供一种目标在回路相干合成系统的相位控制方法,包括:通过开启一级活塞相位控制模块,产生一级活塞相位控制信号,对一级光路中各相位调制器施加控制,使第1到第n个第一光电探测器探测到的信号稳定到最大值;通过开启二级活塞相位控制模块,产生二级活塞相位控制信号,对二级光路中各相位调制器施加控制,使第二光电探测器探测到的信号稳定到最大值;至此,实现了输出的激光阵列中各子激光的相位锁定。
18.需要说明的是,本发明中对于上述一级活塞相位控制模块、二级活塞相位控制模块的开启顺序没有严格限定,本领域技术人员可以灵活调整。如一级活塞相位控制模块、二级活塞相位控制模块可以同时开启。或者,先开启一级活塞相位控制模块,后开启二级活塞相位控制模块,此后工作过程中,一级活塞相位控制模块、二级活塞相位控制模块都保持开启状态。
19.相比现有技术,本发明的技术效果:本发明的光路设计可以采用全光纤结构,通过全光纤结构实现各路激光的相位探测与控制,提高了激光相控阵系统的扩展性和紧凑性。
20.本发明采用两级活塞相位控制实现对激光放大器和大气湍流引起的活塞相差进行有效校正。其中,一级活塞相位控制单元从激光阵列内部获取评价函数,对激光放大器中的高频活塞相位噪声进行校正,由于无需从目标处获取评价函数,具有控制速率高的优点;二级活塞相位控制单元从目标处获取评价函数,利用二级活塞相位控制单元间接地对对大气湍流中的活塞相差的校正。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
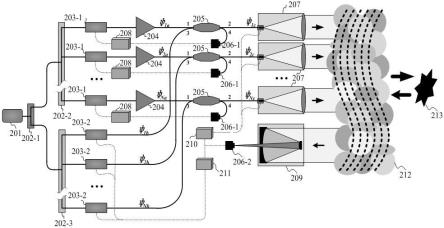
22.图1为现有技术中的目标在回路激光相干阵列的结构示意框图;图2为本发明一实施例中提供的目标在回路相干合成系统的结构示意图。
具体实施方式
23.为使本发明实施例的目的、技术方案和优点更加清楚明白,下面将以附图及详细叙述清楚说明本发明所揭示内容的精神,任何所属技术领域技术人员在了解本发明内容的实施例后,当可由本发明内容所教示的技术,加以改变及修饰,其并不脱离本发明内容的精神与范围。本发明的示意性实施例及其说明用于解释本发明,但并不作为对本发明的限定。
24.在本发明一实施例中,提供一种目标在回路相干合成系统,包括:种子激光器,输出种子激光;种子激光分束光路,将种子激光分为2路,其中一路进一步分束为n路后输入一级光路,另一路进一步分束为n路后输入二级光路;一级光路,将输入的n路子激光分别进行相位调制、功率放大,相位调制、功率放大后的各路子激光的一部分通过n个自适应激光准直器输出激光阵列发射到目标,各路子激光的另一部分作为探测子激光输出;二级光路,将输入的n路子激光分别进行相位调制后对应耦合入一级光路的各子激光光路中;一级活塞相位控制模块,利用n个第一光电探测器探测一级光路输出的n路探测子激光,据此产生对应的一级活塞相位控制信号,对一级光路中各对应的相位调制器施加控制,进而对一级光路中激光放大器中的高频活塞相位噪声进行校正;二级活塞相位控制模块,利用望远镜接收激光阵列发射到目标后散射回来的散射光,利用第二光电探测器探测接收望远镜接收到的散射光强,据此产生倾斜相位控制信号和二级活塞相位控制信号,倾斜相位控制信号对一级光路中的各自适应激光准直器施加控制,二级活塞相位控制信号对二级光路中各相位调制器施加控制,进而对大气湍流引起的倾斜相差、活塞相差进行校正。
25.参照图2,本发明一实施例中,提供的目标在回路相干合成系统,包括种子激光源201、1
×
2激光分束器202-1、第一1
×
n激光分束器202-2、第二1
×
n激光分束器202-3、第一相位调制器203-1、第二相位调制器203-2、激光放大器204、2
×
2光纤耦合器205、第一光电探测器206-1、第二光电探测器206-2、自适应激光准直器207、一级活塞相位控制单元208、望远镜209、倾斜控制单元210、二级活塞相位控制单元211。其中1
×
2激光分束器202-1、第一1
×
n激光分束器202-2、第二1
×
n激光分束器202-3构成种子激光分束光路。n个第一相位调制器203-1、n个激光放大器204、n个2
×
2光纤耦合器205、n个自适应激光准直器207构成一级光路。n个第二相位调制器203-2构成二级光路。n个第一光电探测器206-1、一级活塞相位控制单元208构成一级活塞相位控制模块。望远镜209、第二光电探测器206-2、倾斜控制单元210、二级活塞相位控制单元211构成二级活塞相位控制模块。
26.种子激光源201连接1
×
2激光分束器202-1的输入端口,1
×
2激光分束器202-1的两个输出端口,分别为第一输出端口和第二输出端口,1
×
2激光分束器202-1的第一输出端
口、第二输出端口分别连接第一1
×
n激光分束器202-2的输入端口和第二1
×
n激光分束器202-3的输入端口。
27.第一1
×
n激光分束器202-2的n个输出端口分别连接一条子激光处理路径,第i条子激光处理路径上依次设有第i个第一相位调制器203-1、第i个激光放大器204、第i个2
×
2光纤耦合器205和第i个自适应激光准直器207,其中各2
×
2光纤耦合器205均具有四个端口,i=1,2,...n。
28.所述2
×
2光纤耦合器,当激光从2
×
2光纤耦合器的第一端口输入时,大部分功率的激光从2
×
2光纤耦合器的第二端口输出,其他小部分功率的激光从2
×
2光纤耦合器的第四端口输出;当激光从2
×
2光纤耦合器的第三端口输入时,大部分功率的激光从2
×
2光纤耦合器的第四端口输出。
29.种子激光源201出射的种子光经1
×
2激光分束器202-1分为2路,其中第一路激光经第一1
×
n激光分束器202-2分束为n路子激光,其中第i路子激光经第i个第一相位调制器203-1进行相位调制、第i个激光放大器204进行功率放大后输入到第i个2
×
2光纤耦合器205,n个自适应激光准直器207输出的激光阵列发射到目标213。
30.第i个2
×
2光纤耦合器205的第一端口连接第i个激光放大器204,第i个2
×
2光纤耦合器205的第二端口连接第i个自适应激光准直器207,第i个2
×
2光纤耦合器205的第四端口连接第i个第一光电探测器206-1,第i个第一光电探测器206-1连接第i个一级活塞相位控制单元208,第i个一级活塞相位控制单元208连接第i个第一相位调制器203-1;第二1
×
n激光分束器202-3的n个输出端口分别连接一个第二相位调制器203-2,第i个第二相位调制器203-2的另一端连接第i个2
×
2光纤耦合器205的第三端口。
31.望远镜209用于接收激光阵列发射到目标后散射回来的散射光,第二光电探测器206-2探测接收望远镜接收到的散射光强,第二光电探测器206-2连接倾斜控制单元210和二级活塞相位控制单元211;所述第二光电探测器206-2位于望远镜209的探测焦平面处。
32.倾斜控制单元210连接n个自适应激光准直器207,基于第二光电探测器206-2输出的电信号产生输出信号,对各个自适应激光准直器207施加控制,对大气湍流212引起的倾斜相差进行校正;二级活塞相位控制单元211连接n个第二相位调制器203-2,基于第二光电探测器206-2输出的电信号产生相位控制信号,对n个第二相位调制器203-2施加控制,使望远镜209接收到的散射光强达到最优,实现对大气湍流212引起的活塞相差的校正。
33.n个一级活塞相位控制单元208上均预先加载有活塞相位控制方法,本发明中的活塞相位控制方法不限,可以采用现有技术中各种相位控制优化算法,如单抖动法、spgd法等等。
34.倾斜控制单元210上均预先加载有倾斜相位控制算法,本发明中的倾斜相位控制方法不限,可以采用现有技术中各种相位控制优化算法,如单抖动法、spgd法等等。
35.二级活塞相位控制单元211上均预先加载有活塞相位控制算法,本发明中的活塞相位控制方法不限,可以采用现有技术中各种相位控制优化算法,如单抖动法、spgd法等等。
36.基于上述实施例提供的目标在回路相干合成系统,下面提供一种目标在回路相干合成系统的相位控制方法,包括以下步骤:(1)开启n个一级活塞相位控制单元208,各一级活塞相位控制单元208产生相位控
制信号并输出到对应的相位调制器,使第1到第n个第一光电探测器探测到的信号稳定到最大值;(2)开启二级活塞相位控制单元211,二级活塞相位控制单元211产生相位控制信号并输出到对应的相位调制器,使第二光电探测器探测到的信号稳定到最大值;至此,实现了输出的激光阵列中各子激光的相位锁定。
37.在步骤(1)中,各一级活塞相位控制单元产生相位控制信号并输出到对应的相位调制器,使第1到第n个第一光电探测器探测到的信号稳定到最大值,此时,满足第一关系式:;其中,1
×
2激光分束器的第一输出端口与第一1
×
n激光分束器的输入端口连接,表示1
×
2激光分束器的第一输出端口到第一1
×
n激光分束器的输入端口之间的相位;表示第一1
×
n激光分束器的第i个输出端口到第i个2
×
2光纤耦合器的第一端口之间的相位;表示1
×
2激光分束器的第二输出端口到第二1
×
n激光分束器的输入端口之间的相位;表示第二1
×
n激光分束器的第i个输出端口到第i个2
×
2光纤耦合器的第三端口之间的相位。
38.在步骤(2)中,二级活塞相位控制单元产生相位控制信号并输出到对应的相位调制器,使第二光电探测器探测到的信号稳定到最大值,即满足第二关系式:;其中,表示第i个2
×
2光纤耦合器的第二端口到第i个自适应激光准直器的输出端之间的相位,表示第i个自适应激光准直器的输出端与目标213之间的相位;将第一关系式代入第二关系式,得到第三关系式:;第三关系式表示表示种子激光源发出的激光,经过功率放大,由各自适应激光准直器输出后到达目标的活塞相位相同,因此实现了输出的激光阵列中各子激光的相位锁定。
39.需要说明的是,本发明中对于上述一级活塞相位控制模块、二级活塞相位控制模块的开启顺序没有严格限定,本领域技术人员可以灵活调整。上述实施例中是先开启一级活塞相位控制模块(即步骤(1)),后开启二级活塞相位控制模块(即步骤(2)),此后工作过程中,一级活塞相位控制模块、二级活塞相位控制模块都保持开启状态。
40.在本发明另一实施例中,提供一种目标在回路相干合成系统的相位控制方法,可以将一级活塞相位控制模块、二级活塞相位控制模块同时开启;通过开启一级活塞相位控制模块,产生一级活塞相位控制信号,对一级光路中各相位调制器施加控制,使第1到第n个第一光电探测器探测到的信号稳定到最大值;通过开启二级活塞相位控制模块,产生二级活塞相位控制信号,对二级光路中各相位调制器施加控制,使第二光电探测器探测到的信号稳定到最大值;至此,实现了输出的激光阵列中各子激光的相位锁定。
41.本发明未尽事宜为公知技术。
42.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
43.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1