一种高压带电接引线装置及其控制方法
本发明涉及高压电线接线,具体涉及一种高压带电接引线装置及其控制方法。
背景技术:
1、在供电输电过程中经常需要高压带电进行接引线的操作。目前,在10kv以上等高压配网接引线,普遍采用人工进行带电接引线的作业方式。技术人员进行带电接引线作业的方法已经在实践中证实,能相对有效并且高效地应对大部分配电线路系统运行中会出现的各种问题情况。但这种操作方法,需要操作者长时间处于高空,工人劳动强度大,操作困难;同时由于操作者长期处于高空、露天、高压和高电磁辐射等恶劣的工作环境中,造成跌落或高压触电等而引起的重大人身伤亡事件不断发生。
技术实现思路
1、有鉴于此,本发明的主要目的在于提供一种高压带电接引线装置及其控制方法。
2、为达到上述目的,本发明的技术方案是这样实现的:
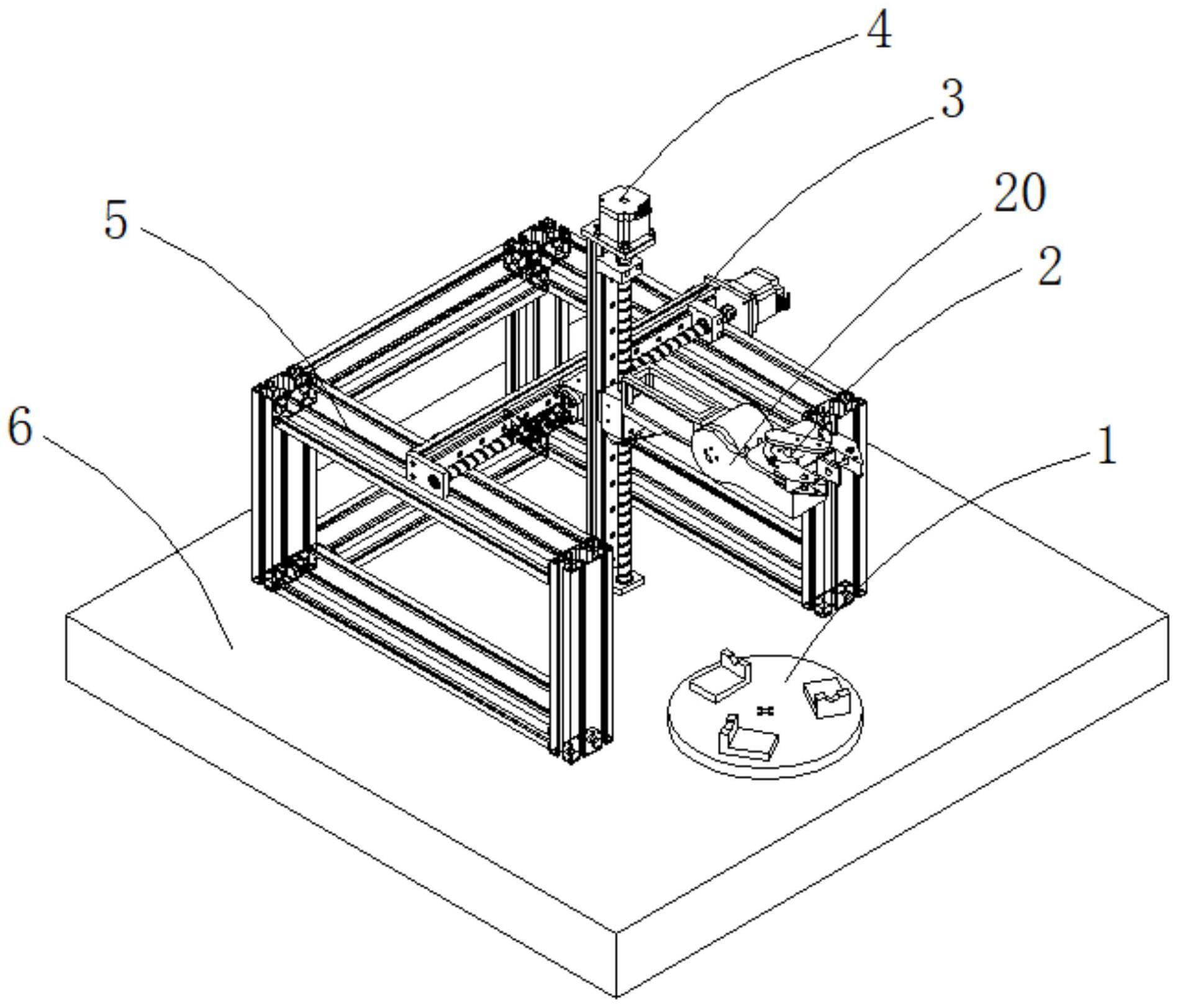
3、本发明实施例一提供一种高压带电接引线装置,包括线夹放置组件、机械手组件、横向移动组件、纵向移动组件、支撑架、基座,所述支撑架和线夹放置组件均设置于基座上,且所述线夹放置组件位于支撑架的一侧,所述横向移动组件设置于支撑架上,所述纵向移动组件可移动的垂直设置于横向移动组件上,所述机械手组件设置于纵向移动组件上,用于夹持位于线夹放置组件上的电线。
4、上述方案中,所述线夹放置组件包括线夹放置平台、旋转电机、线夹放置件、旋转轴,所述旋转电机固定于基座的底部,所述旋转轴贯穿基座,所述旋转轴的一端与旋转电机的转轴连接,另一端与线夹放置平台固定,所述线夹放置件包括若干,均匀设置于线夹放置平台的边缘。
5、上述方案中,所述线夹放置件为“l”型结构,其较长的一边与线夹放置平台固定,其较短的一端端面上设置有凹槽,用于放置线夹。
6、上述方案中,所述横向移动组件包括第一电机、第一支撑杆、第一支撑块、第一螺杆、第一滑动块,所述第一支撑杆固定于支撑架的顶部,所述第一电机固定于第一支撑杆的一端,所述第一支撑块固定于第一支撑杆的一侧,所述第一滑动块滑动设置于第一支撑杆上,所述第一螺杆贯穿第一支撑块和第一滑动块,所述第一螺杆的一端与第一电机的转轴连接,所述第一滑动块用于固定连接纵向移动组件。
7、上述方案中,所述纵向移动组件包括第二电机、第二支撑杆、第二支撑块、第二螺杆、第二滑动块,所述第二支撑杆与第一滑动块固定连接,所述第二电机固定于第二支撑杆的一端,所述第二支撑块固定于第二支撑杆的一侧,所述第二滑动块滑动设置于第二支撑杆上,所述第二螺杆贯穿第二支撑块和第二滑动块,所述第二螺杆的一端与第二电机的转轴连接,所述第二滑动块用于固定连接机械手组件。
8、上述方案中,所述机械手组件包括机械臂、机械手平台、回转控制部件、夹取部件,所述机械臂的一端与第二滑动块连接,所述机械手平台的一端与机械臂的另一端连接,所述夹取部件设置于机械手平台的另一端,所述回转控制部件设置于机械手平台上,用于控制夹取部件的开合。
9、上述方案中,所述回转控制部件包括旋钮、第一连杆、第二连杆、驱动电机,所述驱动电机设置于机械手平台的底部,所述驱动电机的转轴穿过机械手平台后与旋钮中部连接,所述第一连杆和第二连杆均为弧形结构,所述旋钮的两端分别与第一连杆和第二连杆的一端旋转连接。
10、上述方案中,所述夹取部件包括第一机械手、第二机械手、伸缩螺杆、调节电机、夹取件、滑块,所述滑块设置于机械手平台的另一端,所述第一机械手和第二机械手的一端均设置有与滑块匹配的滑槽,所述第一机械手和第二机械手滑动设置于机械手平台上,所述第一机械手的一端与第一连杆的另一端连接、所述第二机械手的一端与第二连杆的另一端连接,所述调节电机设置于第一机械手内,所述伸缩螺杆的一端穿过第一机械手的内侧后与调节电机的转轴连接,所述伸缩螺杆的另一端的另一端设置有套筒,所述夹取件穿过套筒后旋转设置于伸缩螺杆的另一端。
11、本发明实施例二提供一种应用在上述高压带电接引线装置的控制方法,该方法包括:
12、收集大量线缆图像并划分为训练数据集和测试数据集完成对yolov5模型的训练,获得训练完成的yolov5模型;
13、通过双目相机获取左视角图像、右视角图像;
14、通过所述训练完成的yolov5模型确定左视角图像、右视角图像中每个目标物体在图像中的目标位置;
15、通过orb(oriented fast and rotated brief)特征匹配算法确定每个目标位置的特征点、以及每个特征点的位置和描述子;
16、根据所述每个目标位置的特征点、以及每个特征点的位置和描述子确定特征点的像素坐标和相应的3d点坐标;
17、通过pnp算法(perspective-n-point)通过已知的双目相机内参矩阵、特征点的像素坐标和相应的3d点坐标确定目标物体在相机坐标系下的位姿;
18、确定每个关节相对于机械臂底座的世界坐标系,获取末端执行其到达目标物体时的位姿;
19、根据目标物体在相机坐标系下的位姿和末端执行其到达目标物体时的位姿确定机械臂动作的路径规划;
20、所述机械臂在当前状态下如果通过机械臂动作的路径规划能够到达目标位置,执行目标动作。
21、上述方案中,该方法还包括:如果所述机械臂在当前状态下如果通过机械臂动作的路径规划无法到达目标位置,则通过rrt运动规划算法寻找一个使得目标位置可达的位置,并驱动各个关节完成运动动作。
22、与现有技术相比,本发明实现对电线的检测,以及对线夹的抓取、夹紧、搬运、接引线工作等一体化作业,从而取代人工,以改善工人的工作条件。该装置采用三自由度机器人,结构简单,操作方便,有效提高带电操纵作业的安全性和效率,也降低了成本。同时有效解决危机人身和设备安全等问题。
技术特征:
1.一种高压带电接引线装置,其特征在于,包括线夹放置组件、机械手组件、横向移动组件、纵向移动组件、支撑架、基座,所述支撑架和线夹放置组件均设置于基座上,且所述线夹放置组件位于支撑架的一侧,所述横向移动组件设置于支撑架上,所述纵向移动组件可移动的垂直设置于横向移动组件上,所述机械手组件设置于纵向移动组件上,用于夹持位于线夹放置组件上的电线。
2.根据权利要求1所述的高压带电接引线装置,其特征在于,所述线夹放置组件包括线夹放置平台、旋转电机、线夹放置件、旋转轴,所述旋转电机固定于基座的底部,所述旋转轴贯穿基座,所述旋转轴的一端与旋转电机的转轴连接,另一端与线夹放置平台固定,所述线夹放置件包括若干,均匀设置于线夹放置平台的边缘。
3.根据权利要求2所述的一种高压带电接引线装置,其特征在于,所述线夹放置件为“l”型结构,其较长的一边与线夹放置平台固定,其较短的一端端面上设置有凹槽,用于放置线夹。
4.根据权利要求1-3任意一项所述的高压带电接引线装置,其特征在于,所述横向移动组件包括第一电机、第一支撑杆、第一支撑块、第一螺杆、第一滑动块,所述第一支撑杆固定于支撑架的顶部,所述第一电机固定于第一支撑杆的一端,所述第一支撑块固定于第一支撑杆的一侧,所述第一滑动块滑动设置于第一支撑杆上,所述第一螺杆贯穿第一支撑块和第一滑动块,所述第一螺杆的一端与第一电机的转轴连接,所述第一滑动块用于固定连接纵向移动组件。
5.根据权利要求4所述的高压带电接引线装置,其特征在于,所述纵向移动组件包括第二电机、第二支撑杆、第二支撑块、第二螺杆、第二滑动块,所述第二支撑杆与第一滑动块固定连接,所述第二电机固定于第二支撑杆的一端,所述第二支撑块固定于第二支撑杆的一侧,所述第二滑动块滑动设置于第二支撑杆上,所述第二螺杆贯穿第二支撑块和第二滑动块,所述第二螺杆的一端与第二电机的转轴连接,所述第二滑动块用于固定连接机械手组件。
6.根据权利要求5所述的高压带电接引线装置,其特征在于,所述机械手组件包括机械臂、机械手平台、回转控制部件、夹取部件,所述机械臂的一端与第二滑动块连接,所述机械手平台的一端与机械臂的另一端连接,所述夹取部件设置于机械手平台的另一端,所述回转控制部件设置于机械手平台上,用于控制夹取部件的开合。
7.根据权利要求6所述的高压带电接引线装置,其特征在于,所述回转控制部件包括旋钮、第一连杆、第二连杆、驱动电机,所述驱动电机设置于机械手平台的底部,所述驱动电机的转轴穿过机械手平台后与旋钮中部连接,所述第一连杆和第二连杆均为弧形结构,所述旋钮的两端分别与第一连杆和第二连杆的一端旋转连接。
8.根据权利要求7所述的高压带电接引线装置,其特征在于,所述夹取部件包括第一机械手、第二机械手、伸缩螺杆、调节电机、夹取件、滑块,所述滑块设置于机械手平台的另一端,所述第一机械手和第二机械手的一端均设置有与滑块匹配的滑槽,所述第一机械手和第二机械手滑动设置于机械手平台上,所述第一机械手的一端与第一连杆的另一端连接、所述第二机械手的一端与第二连杆的另一端连接,所述调节电机设置于第一机械手内,所述伸缩螺杆的一端穿过第一机械手的内侧后与调节电机的转轴连接,所述伸缩螺杆的另一端的另一端设置有套筒,所述夹取件穿过套筒后旋转设置于伸缩螺杆的另一端。
9.一种应用在权利要求1-8任意一项所述高压带电接引线装置的控制方法,其特征在于,该方法包括:
10.根据权利要求9所述的控制方法,其特征在于,该方法还包括:如果所述机械臂在当前状态下如果通过机械臂动作的路径规划无法到达目标位置,则通过rrt运动规划算法寻找一个使得目标位置可达的位置,并驱动各个关节完成运动动作。
技术总结
本发明公开了一种高压带电接引线装置及其控制方法,包括线夹放置组件、机械手组件、横向移动组件、纵向移动组件、支撑架、基座,所述支撑架和线夹放置组件均设置于基座上,且所述线夹放置组件位于支撑架的一侧,所述横向移动组件设置于支撑架上,所述纵向移动组件可移动的垂直设置于横向移动组件上,所述机械手组件设置于纵向移动组件上,用于夹持位于线夹放置组件上的电线。
技术研发人员:汤俊杰,王涛,王昌权,上官桔钰,蔡瑞麟,周本政,龙洋辉,王鑫,郑鸿基,廖光皓,林欣欣,黄家铭
受保护的技术使用者:广东海洋大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!