一种摆臂式可力控固晶系统和力控固晶的方法与流程
本发明属于半导体生产设备领域,尤其涉及一种摆臂式可力控固晶系统和力控固晶的方法。
背景技术:
1、固晶是半导体行业封装重要的工序,随着固晶机的成熟以及大量推广,固晶在整个封装过程中的重要性尤为突出。传统的固晶机大致分为分为带力控装置的直线固晶机和不带力控装置的摆臂式固晶机,带力控装置的直线固晶机采取走直线的工作方式,优点是精度高,缺点是效率低下;不带力控装置的摆臂式固晶机是通过弹片形变的方式进行固晶,优点是速度快,缺点是固晶压力不可控,固晶完成后胶点厚度控制精度不高。
技术实现思路
1、本发明的目的在于提供一种摆臂式可力控固晶系统和力控固晶的方法,旨在解决现有技术中的摆臂式固晶机所存在的固晶压力不可控,固晶完成后胶点厚度控制精度不高的问题。
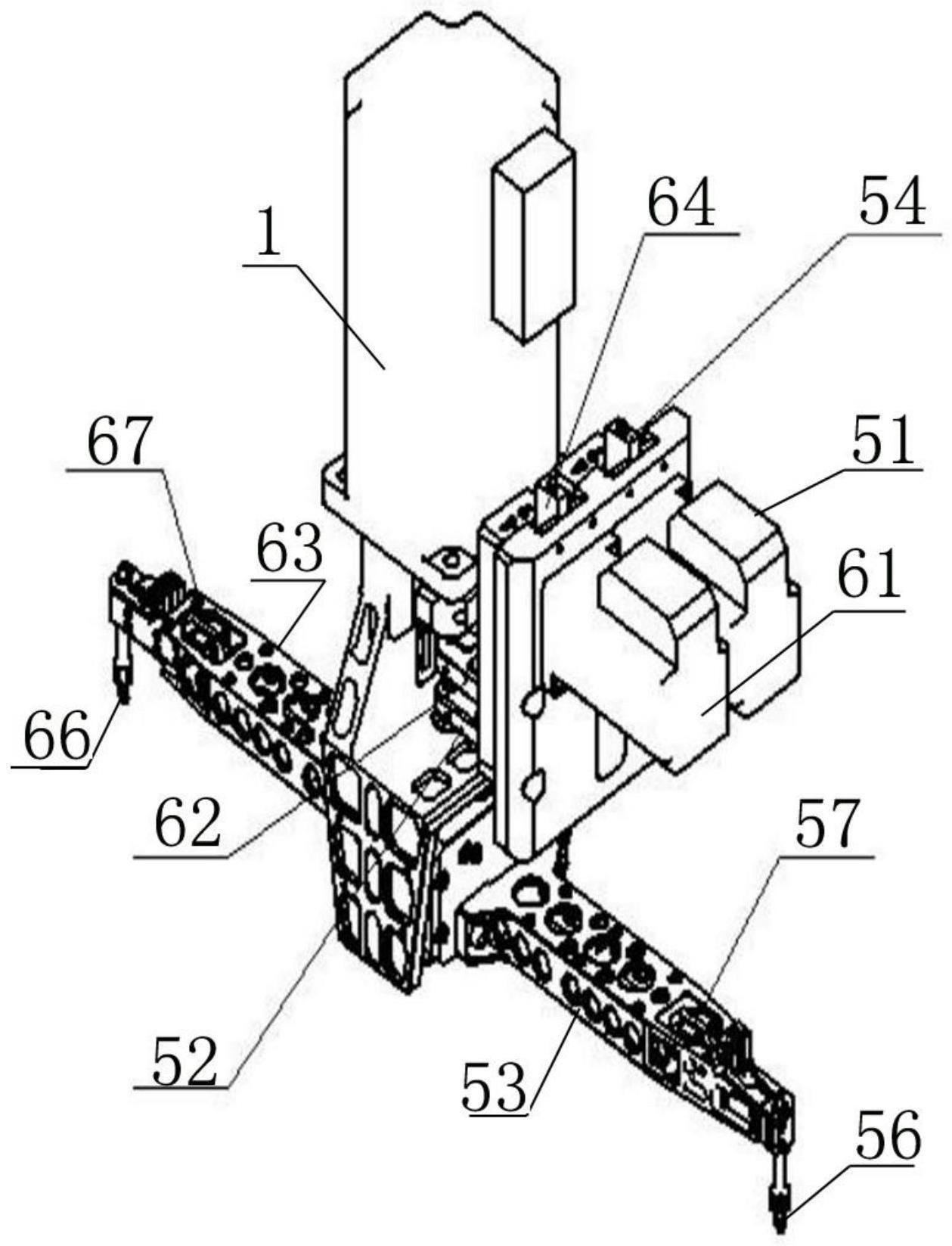
2、本发明是这样实现的,一种摆臂式可力控固晶系统,包括固晶臂、吸嘴、旋转动力机构、固晶臂升降驱动机构、吸嘴安装座以及力控音圈电机;所述固晶臂与所述旋转动力机构的转轴固定连接,所述固晶臂与所述固晶臂升降驱动机构的动力输出端固定连接,所述旋转动力机构能驱动所述固晶臂水平摆动,所述固晶臂升降驱动机构能驱动所述固晶臂垂直升降;所述力控音圈电机固定在所述固晶臂的自由端,所述吸嘴安装座与所述力控音圈电机的动力输出端固定连接,所述吸嘴固定在所述吸嘴安装座上;所述力控音圈电机具备力度控制以及压力检测功能;当所述力控音圈电机检测到晶片所受的压力达到预设晶片压力后,所述固晶臂升降驱动机构能停止下压所述吸嘴,完成固晶。
3、进一步的,所述摆臂式可力控固晶系统还包括基座,所述旋转动力机构固定在所述基座上。
4、进一步的,所述摆臂式可力控固晶系统还包括吸嘴安装座升降滑块和吸嘴安装座升降滑槽,所述吸嘴安装座升降滑块与所述吸嘴安装座固定连接,所述吸嘴安装座升降滑槽与所述固晶臂固定连接,所述力控音圈电机能驱动所述吸嘴安装座升降滑块相对于所述吸嘴安装座升降滑槽上下滑动。
5、进一步的,所述摆臂式可力控固晶系统还包括连接座、固晶臂升降滑块和固晶臂升降滑轨,所述连接座的顶端与所述旋转动力机构的转轴固定连接;所述固晶臂与所述固晶臂升降滑块固定连接,所述固晶臂升降滑轨与所述连接座固定连接;所述固晶臂升降驱动机构能驱动所述固晶臂升降滑块相对于所述固晶臂升降滑轨上下滑动。
6、进一步的,所述摆臂式可力控固晶系统还包括用于检测所述吸嘴原点高度位置的吸嘴升降原点传感器。
7、进一步的,所述摆臂式可力控固晶系统包括至少一个双固晶单元,所述双固晶单元包括两个所述固晶臂升降驱动机构、两个所述固晶臂、两个所述吸嘴安装座、两个所述力控音圈电机以及两个所述吸嘴;其中,两个所述固晶臂沿所述旋转动力机构的转轴轴向对称设置;所述旋转动力机构能驱动两个所述固晶臂同时水平摆动,两个所述固晶臂升降驱动机构能独立驱动与其对应的所述固晶臂垂直升降。
8、进一步的,所述双固晶单元还包括两个升降传动板、拉杆以及中空轴套,所述拉杆可活动地穿设于所述中空轴套内;一个所述固晶臂升降驱动机构的动力输出端与一个所述升降传动板的一端固定连接,所述升降传动板的另一端通过所述拉杆与一个所述固晶臂固定连接;另一个所述固晶臂升降驱动机构的动力输出端与另一个所述升降传动板的一端固定连接,另一个所述升降传动板的另一端通过所述中空轴套与另一个所述固晶臂固定连接。
9、进一步的,所述双固晶单元还包括两个固晶臂连接板,一个所述固晶臂连接板的一端与一个所述固晶臂固定连接,另一端的顶部往外侧延伸出上连接部,所述上连接部与所述中空轴套固定连接;另一个所述固晶臂连接板的一端与另一个所述固晶臂固定连接,另一端的底部往外侧延伸出下连接部,所述下连接部与所述拉杆固定连接。
10、为实现上述发明目的,本发明还提供了一种应用上述摆臂式可力控固晶系统实现力控固晶的方法,包括以下步骤:
11、a、旋转动力机构驱动两个固晶臂做旋转运动,将第一固晶臂旋转到晶片上方,让第一固晶臂上的第一吸嘴对准所要吸取的晶片;此时第二固晶臂位于需要固晶的位置上方;
12、b、第一固晶臂升降驱动机构驱动第一固晶臂带动第一吸嘴向下运动到晶片上表面,第一吸嘴接触到晶片后,第一力控音圈电机检测到第一吸嘴上的压力达到设定值后,第一固晶臂升降驱动机构停止向下运动,此时第一吸嘴产生真空,把晶片吸住,接着第一固晶臂升降驱动机构向上运动,将晶片向上吸起;
13、c、旋转动力机构驱动第一固晶臂和第二固晶臂同时做旋转运动,将第二固晶臂旋转到晶片上方,让第二固晶臂上的第二吸嘴对准所要吸取的晶片;此时第二固晶臂位于需要固晶的位置上方;
14、d、第一固晶臂升降驱动机构驱动第一固晶臂带动第一吸嘴向下运动到需要固晶物体的上方,第一吸嘴带动晶片接触到物体表面后,第一力控音圈电机检测到第一吸嘴上的压力达到设定值后,第一固晶臂升降驱动机构停止向下运动,此时第一吸嘴释放真空,晶片脱离第一吸嘴,被固定在需要固晶的物体表面,接着第一固晶臂升降驱动机构向上运动,将第一固晶臂和第一吸嘴向上抬起;
15、e、第一固晶臂在固晶的同时,第二固晶臂在第二固晶臂升降驱动机构驱动下带动第二吸嘴向下运动到晶片上表面,第二吸嘴接触到晶片后,第二力控音圈电机检测到第二吸嘴上的压力达到设定值后,第二固晶臂升降驱动机构停止向下运动,此时第二吸嘴产生真空,把晶片吸住,接着第二固晶臂升降驱动机构向上运动,将晶片向上吸起;
16、f、旋转动力机构驱动第一固晶臂和第二固晶臂做旋转运动,将第一固晶臂臂旋转到晶片上方,让第一固晶臂上的第一吸嘴对准所要吸取的晶片;此时第二固晶臂位于需要固晶的位置上方;重复a~e的动作,使第一固晶臂和第二固晶臂不断的交替工作,实现每颗晶片吸取和固晶时的压力都能被准确控制,保证吸晶和固晶的力度都在设定的范围内。
17、本发明与现有技术相比,有益效果在于:
18、本发明的摆臂式可力控固晶系统包括吸嘴安装座以及力控音圈电机,吸嘴固定在吸嘴安装座上,力控音圈电机具备力度控制以及压力检测功能,力控音圈电机以设定的力度驱动吸嘴下压;当力控音圈电机检测到晶片所受的压力达到预设压力后,固晶臂升降驱动机构停止下压吸嘴,完成固晶。可见,本发明的摆臂式可力控固晶系统实现了固晶压力的量化,固晶压力控制精准,固晶完成后胶点的厚度控制精度高。
19、本发明的力控固晶方法,通过旋转动力机构能两个固晶臂同时做旋转运动,使两个固晶臂不断的交替工作,实现每颗晶片吸取和固晶时的压力都能被准确控制,保证吸晶和固晶的力度都在设定的范围内,在实现力控固晶的同时,提高了固晶效率。
技术特征:
1.一种摆臂式可力控固晶系统,固晶臂和吸嘴;其特征在于,还包括旋转动力机构、固晶臂升降驱动机构、吸嘴安装座以及力控音圈电机;所述固晶臂与所述旋转动力机构的转轴固定连接,所述固晶臂与所述固晶臂升降驱动机构的动力输出端固定连接,所述旋转动力机构能驱动所述固晶臂水平摆动,所述固晶臂升降驱动机构能驱动所述固晶臂垂直升降;所述力控音圈电机固定在所述固晶臂的自由端,所述吸嘴安装座与所述力控音圈电机的动力输出端固定连接,所述吸嘴固定在所述吸嘴安装座上;所述力控音圈电机具备力度控制以及压力检测功能;当所述力控音圈电机检测到晶片所受的压力达到预设晶片压力后,所述固晶臂升降驱动机构停止下压所述吸嘴,完成固晶。
2.如权利要求1所述的摆臂式可力控固晶系统,其特征在于,还包括基座,所述旋转动力机构固定在所述基座上。
3.如权利要求1所述的摆臂式可力控固晶系统,其特征在于,还包括吸嘴安装座升降滑块和吸嘴安装座升降滑槽,所述吸嘴安装座升降滑块与所述吸嘴安装座固定连接,所述吸嘴安装座升降滑槽与所述固晶臂固定连接,所述力控音圈电机能驱动所述吸嘴安装座升降滑块相对于所述吸嘴安装座升降滑槽上下滑动。
4.如权利要求1所述的摆臂式可力控固晶系统,其特征在于,还包括连接座、固晶臂升降滑块和固晶臂升降滑轨,所述连接座的顶端与所述旋转动力机构的转轴固定连接;所述固晶臂与所述固晶臂升降滑块固定连接,所述固晶臂升降滑轨与所述连接座固定连接;所述固晶臂升降驱动机构能驱动所述固晶臂升降滑块相对于所述固晶臂升降滑轨上下滑动。
5.如权利要求1所述的摆臂式可力控固晶系统,其特征在于,还包括用于检测所述吸嘴原点高度位置的吸嘴升降原点传感器。
6.如权利要求1至5中任一项所述的摆臂式可力控固晶系统,其特征在于,包括至少一个双固晶单元,所述双固晶单元包括两个所述固晶臂升降驱动机构、两个所述固晶臂、两个所述吸嘴安装座、两个所述力控音圈电机以及两个所述吸嘴;其中,两个所述固晶臂沿所述旋转动力机构的转轴轴向对称设置;所述旋转动力机构能驱动两个所述固晶臂同时水平摆动,两个所述固晶臂升降驱动机构能独立驱动与其对应的所述固晶臂垂直升降。
7.如权利要求6所述的摆臂式可力控固晶系统,其特征在于,所述双固晶单元还包括两个升降传动板、拉杆以及中空轴套,所述拉杆可活动地穿设于所述中空轴套内;一个所述固晶臂升降驱动机构的动力输出端与一个所述升降传动板的一端固定连接,所述升降传动板的另一端通过所述拉杆与一个所述固晶臂固定连接;另一个所述固晶臂升降驱动机构的动力输出端与另一个所述升降传动板的一端固定连接,另一个所述升降传动板的另一端通过所述中空轴套与另一个所述固晶臂固定连接。
8.如权利要求7所述的摆臂式可力控固晶系统,其特征在于,所述双固晶单元还包括两个固晶臂连接板,一个所述固晶臂连接板的一端与一个所述固晶臂固定连接,另一端的顶部往外侧延伸出上连接部,所述上连接部与所述中空轴套固定连接;另一个所述固晶臂连接板的一端与另一个所述固晶臂固定连接,另一端的底部往外侧延伸出下连接部,所述下连接部与所述拉杆固定连接。
9.一种应用权利要求6所述的摆臂式可力控固晶系统实现力控固晶的方法,其特征在于,包括以下步骤:
技术总结
本发明提供了一种摆臂式可力控固晶系统和力控固晶的方法,该固晶系统包括固晶臂、吸嘴、旋转动力机构、固晶臂升降驱动机构、吸嘴安装座以及力控音圈电机,力控音圈电机固定在固晶臂上,吸嘴安装座与力控音圈电机的动力输出端固定连接,吸嘴固定在吸嘴安装座上,力控音圈电机具备力度控制以及压力检测功能,力控音圈电机以设定的力度驱动吸嘴下压;当力控音圈电机检测到晶片所受的压力达到预设压力后,固晶臂升降驱动机构停止下压吸嘴,完成固晶。可见,本发明的固晶系统实现了固晶压力的量化,固晶压力控制精准,固晶完成后胶点的厚度控制精度高,本发明的力控固晶方法可使两个固晶臂不断的交替工作,提高了固晶效率。
技术研发人员:唐文轩,曾智军,杨世国
受保护的技术使用者:深圳市微恒自动化设备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!