配网旁路线缆挂接装置、方法及带电作业机器人与流程
本发明涉及电力机器人,特别涉及一种配网旁路线缆挂接装置、方法及带电作业机器人。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术,并不必然构成现有技术。
2、配电线路由于设备损坏、线路老化等各种原因,可能会出现各种故障,影响线路的正常运行,停电作业会对居民的生活造成影响,供电公司也会遭受经济损失,所以要进行不停地作业。传统的不停电作业方法为旁路作业法,即首先将旁路设备接入线路,使之与待检修设备并行运行,然后将待检修设备从线路中脱离进行停电作业,此时由旁路设备继续向用户供电,检修完毕后将设备重新接入线路中,再将旁路设备撤除。
3、发明人发现,传统的旁路作业法需要作业人员先做好绝缘防护(夏天炎热),爬上杆塔(劳动强度大)进行作业,效率低下;而且作业人员直接与带电体近距离作业,虽然有绝缘防护,依然存在触电的风险。
技术实现思路
1、为了解决现有技术的不足,本发明提供了一种配网旁路线缆挂接装置、方法及带电作业机器人,借助电力机器人,可远程实现旁路线缆的挂接作业,提高了作业效率,降低了作业人员的劳动强度,增加了作业的安全性。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明第一方面提供了一种旁路线缆挂接装置。
4、一种配网旁路线缆挂接装置旁路线缆挂接装置,包括:挂导线机构和接导线机构;
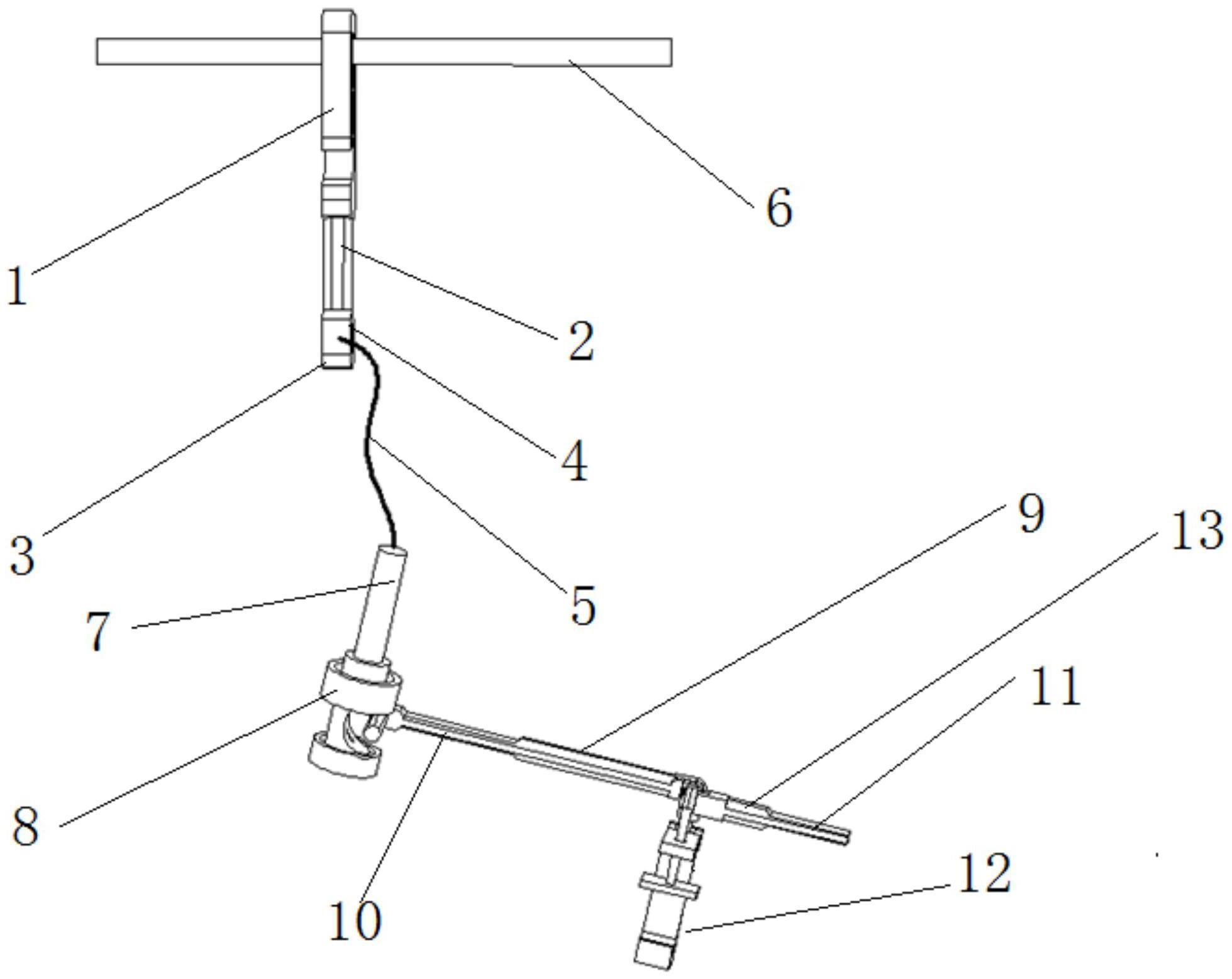
5、挂导线机构为绝缘挂钩,绝缘挂钩包括:钩体、第一夹持部以及穿绳部,钩体位于第一夹持部的一端,穿绳部位于第一夹持部的另一端,穿绳部开有穿绳孔;
6、接导线机构至少包括猴头线夹、转接件、转接延伸件、转动轴和旁路线缆接头,猴头线夹与转动轴转动连接,转接件的第一端与转接延伸件的第一端通过转动轴的底座连接。
7、作为可选的一种实现方式,转接件设有第二夹持部,转接延伸件设有第三夹持部,转接件的第二端与旁路线缆接头连接,旁路线缆接头与旁路线缆连接,绝缘绳的一端通过穿绳孔与绝缘挂钩连接,绝缘绳的另一端与旁路线缆连接。
8、作为可选的一种实现方式,钩体、第一夹持部以及穿绳部一体成型。
9、作为可选的一种实现方式,转动轴包括转轴和底座,猴头线夹与转轴连接且能够随转轴转动,转接件的第一端与转接延伸件的第一端分别与转动轴的底座可拆卸的固定连接。
10、作为可选的一种实现方式,转接件的第一端与转动轴的底座的一侧可拆卸的固定连接,转接延伸件的第一端与转动轴的底座的另一侧可拆卸的固定连接;
11、转动轴底座的第一侧设有第一梅花形楔台,转动轴底座的第二侧设有第二梅花形楔台,第一梅花形楔台、第二梅花形楔台分别用于与转接件和转接延伸件配合并旋转设定角度。
12、作为可选的一种实现方式,第一夹持部、第二夹持部和第三夹持部均为用于机械臂夹持的部位。
13、作为可选的一种实现方式,转接件的第二端设有连接部,旁路线缆接头的一端与旁路线缆连接,旁路线缆接头的另一端的开口用于与连接部配合连接。
14、作为进一步的限定,连接部为棱柱结构,且旁路线缆接头另一端的开口呈圆弧状。
15、作为进一步的限定,第二夹持部设置在靠近连接部的位置。
16、本发明第二方面提供了一种配网旁路线缆挂接方法。
17、一种配网旁路线缆挂接方法,利用本发明第一方面所述的配网旁路线缆挂接装置,包括以下过程:
18、将绝缘绳一端系于旁路线缆上,一端系于绝缘挂钩上,机械臂手爪夹持住第一夹持部,移动到导线附近,将绝缘挂钩挂在导线上;
19、提前将猴头线夹通过转接件与旁路线缆接头连接,将转动轴与转接件、转接件延伸调整到一定的角度;
20、机械臂夹持第二夹持部或者第三夹持部后,将接导线机构挂在需要搭接的裸露导线位置,再用另一台机械臂上的电动扳手,将猴头线夹拧紧,完成旁路线缆连接。
21、本发明第三方面提供了一种带电作业机器人,包括本发明第一方面所述的配网旁路线缆挂接装置。
22、与现有技术相比,本发明的有益效果是
23、本发明创新性的提出了一种配网旁路线缆挂接方法,研制了夹持转接件、转接延伸件以及两者连接用的梅花形楔台,可根据接导线装置的位置,选择夹持转接件或者转接延伸件,通过梅花形楔台进行夹持转接件和转接延伸件的角度调节,实现了对接导线机构的更方便夹持,可远程实现旁路线缆的挂接作业,提高了带电作业的自动化水平和作业安全性,提高了不停电作业的频率,在保证作业人员安全的前提下,提高了作业效率。
技术特征:
1.一种配网旁路线缆挂接装置,其特征在于:
2.如权利要求1所述的配网旁路线缆挂接装置,其特征在于:
3.如权利要求1所述的配网旁路线缆挂接装置,其特征在于:
4.如权利要求1所述的配网旁路线缆挂接装置,其特征在于:
5.如权利要求1所述的配网旁路线缆挂接装置,其特征在于:
6.如权利要求1所述的配网旁路线缆挂接装置,其特征在于:
7.如权利要求6所述的配网旁路线缆挂接装置,其特征在于:
8.如权利要求7所述的配网旁路线缆挂接装置,其特征在于:
9.一种配网旁路线缆挂接方法,其特征在于:
10.一种带电作业机器人,其特征在于:
技术总结
本发明提供了一种配网旁路线缆挂接装置、方法及带电作业机器人,包括:挂导线机构和接导线机构;挂导线机构为绝缘挂钩,包括:钩体、第一夹持部以及穿绳部,穿绳部开有穿绳孔;接导线机构至少包括猴头线夹、转接件、转接延伸件、转动轴和旁路线缆接头,猴头线夹与转动轴转动连接,转接件的第一端与转接延伸件的第一端通过转动轴的底座连接;转接件设有第二夹持部,转接延伸件设有第三夹持部,转接件的第二端与旁路线缆接头连接,旁路线缆接头与旁路线缆连接,绝缘绳的一端通过穿绳孔与绝缘挂钩连接,绝缘绳的另一端与旁路线缆连接;本发明可远程实现旁路线缆的挂接作业,增加了作业的安全性。
技术研发人员:曾金保,李健,张海龙,董旭,司金保,李成林,刘继志,马松,宋丙顺,耿凯伦,李丽
受保护的技术使用者:国网智能科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!