晶圆移送手部单元及晶圆移送装置的制作方法
本发明涉及晶圆移送手部单元及晶圆移送装置,更具体地涉及能够以非接触的方式移送晶圆的晶圆移送手部单元及晶圆移送装置。
背景技术:
1、如半导体装置等集成电路器件是可以通过对用作基板的半导体晶圆重复执行一系列单元工艺来制造。例如,在所述晶圆上实施沉积、光刻、蚀刻、清洗、干燥等单元工艺,从而能够形成构成所述集成电路器件的电路图案。
2、上述工艺由晶圆处理装置来实施,在所述晶圆处理装置上配置有晶圆移送装置。所述晶圆移送装置可以利用机械臂来移送晶圆,所述机械臂通常由构成所述机械臂的主体的主体部和把持晶圆的手部单元构成。通常,这些晶圆移送装置的手部单元通过如晶圆引导件及真空等物理挤压来接触后,执行向工艺模块的移送。
技术实现思路
1、要解决的问题
2、然而,这种现有的晶圆移送手部单元及晶圆移送装置存在如下问题:在为了工艺处理而移送晶圆的过程中,由于与移送手部单元或引导件发生物理挤压及接触而容易发生由接触面引起的晶圆的污染,并且由于物理挤压及紧贴对晶圆所施加的应力而容易发生晶圆的损伤和裂纹。
3、此外,由于污染程度相对严重且未充分清洗处理的晶圆背面的污染状态及异物而容易发生污染部分向移送手部单元的转移,由此存在二次晶圆中发生逆污染的问题。
4、本发明为了解决包含上述问题在内的多个问题,其目的在于提供一种在为了工艺处理而移送晶圆的过程中,能够以非接触的状态移送晶圆的晶圆移送手部单元及晶圆移送装置。然而,这样的问题仅仅是例示性的,本发明的范围并不由它们所限定。
5、解决问题的手段:
6、根据本发明的一实施例提供一种晶圆移送手部单元。所述晶圆移送手部单元可以包括:手部主体,具有从主体部朝着长度方向较长地延伸的一对指臂,以能够支撑晶圆;悬浮模块,在所述一对指臂的支撑面上形成规定的空气流,以此向所述晶圆施加浮力,从而使所述晶圆在所述手部主体的所述一对指臂上以规定的高度悬浮,从而能够使所述一对指臂以非接触的状态支撑所述晶圆;和控制部,向所述悬浮模块施加控制信号,以能够控制通过所述悬浮模块喷射至所述一对指臂的所述支撑面的压缩空气的压力或流量、及所吸入的所述压缩空气的压力或流量,从而能够调整在所述一对指臂上悬浮的所述晶圆的所述规定的高度。
7、根据本发明的一实施例,所述悬浮模块可以包括:多个喷射孔部,沿着所述手部主体的所述一对指臂形成为规定的图案,向所述一对指臂的所述支撑面的上方喷射所述压缩空气;和多个真空孔部,沿着所述手部主体的所述一对指臂形成为规定的图案,吸入所述一对指臂的所述支撑面上的所述压缩空气。
8、根据本发明的一实施例,所述悬浮模块还可以包括:喷射流路,在手部主体的内部形成为流路形状,提供将要喷射至所述多个喷射孔部的所述压缩空气;和真空流路,在所述手部主体的内部形成为流路形状,向所述多个真空孔部提供真空。
9、根据本发明的一实施例,所述多个真空孔部可以形成于以支撑在所述一对指臂上的所述晶圆的中心为基准比所述多个喷射孔部更靠近内侧的位置。
10、根据本发明的一实施例,所述多个真空孔部可以形成于以支撑在所述一对指臂上的所述晶圆的中心为基准比所述多个喷射孔部更靠近外侧的位置。
11、根据本发明的一实施例,所述多个真空孔部以比所述多个喷射孔部的直径小的直径形成。
12、根据本发明的一实施例,所述多个真空孔部以比所述多个喷射孔部的个数少的个数形成。
13、根据本发明的一实施例,所述多个真空孔部的内周面可以形成为圆锥面,以使直径随着靠近所述一对指臂的所述支撑面而逐渐增大。
14、根据本发明的一实施例,所述手部主体的所述一对指臂可以包括:下部板,形成有所述喷射流路和所述真空流路;和上部板,以与所述下部板的上表面结合的方式形成为与所述下部板对应的形状,沿着对应于在所述下部板上形成的所述喷射流路和所述真空流路的位置形成有所述多个喷射孔部和所述多个真空孔部。
15、根据本发明的一实施例,所述手部主体可以包括密封构件,所述密封构件沿着所述下部板和所述上部板的外轮廓附近形成,或者沿着所述喷射流路和所述真空流路形成,以能够对形成有所述喷射流路和所述真空流路的所述下部板和与所述下部板的上表面结合的所述上部板之间进行密封,其中,所述上部板与所述下部板的上表面结合,以盖住所述喷射流路和所述真空流路。
16、根据本发明的一实施例,所述手部主体可以包括弹性垫,所述弹性垫为了防止在所述一对指臂的所述下部板与所述主体部的连接部处发生所述喷射流路的压力及所述真空流路的真空压的泄露,而形成为与所述连接部相对应的形状,并且形成在所述连接部处的所述下部板和所述主体部之间,其中,在所述一对指臂的所述下部板与所述主体部的所述连接部处形成有所述喷射流路和所述真空流路的连接部位。
17、根据本发明的一实施例,所述真空流路可以形成为其横截面的面积小于所述喷射流路的横截面的面积的结构。
18、根据本发明的一实施例,所述真空流路可以形成为其宽度和深度中的至少一个以上小于所述喷射流路的宽度和深度的结构。
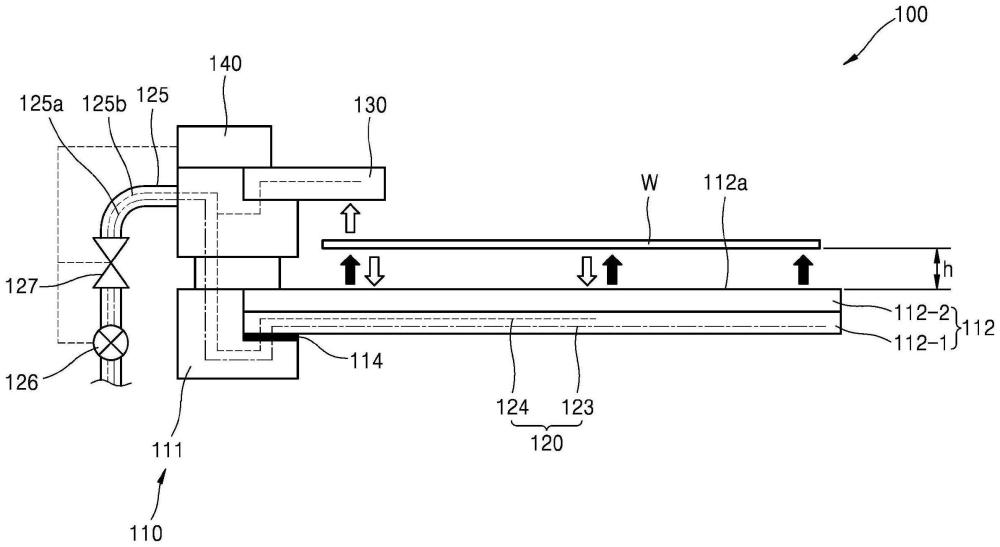
19、根据本发明的一实施例,所述悬浮模块还可以包括:配管部,内置有从外部提供所述压缩空气的气压管线和从外部提供真空压的真空管线,并与所述手部主体的一侧连接,以使所述气压管线和所述真空管线与所述喷射流路和所述真空流路连通;传感部,与所述配管部连接,测定所述气压管线的压力和所述真空管线的真空压;和阀部,与所述配管部连接,调节所述气压管线和所述真空管线的开度。
20、根据本发明的一实施例,所述控制部可以根据从所述传感部接收到的所述气压管线的压力和所述真空管线的真空压向所述阀部施加反馈控制信号,以便通过控制所述气压管线的压力与通过所述真空管线提供的真空压的比例来调整在所述一对指臂上悬浮的所述晶圆的所述规定的高度。
21、根据本发明的一实施例,还可以包括防旋转模块,所述防旋转模块设置于所述主体部的上侧中与所述晶圆的槽部对应的位置上,以形成通过所述槽部的空气流,从而能够约束以处于规定位置的状态悬浮于所述一对指臂上的所述晶圆的旋转。
22、根据本发明的一实施例,所述多个喷射孔部中的至少一个喷射孔部可以形成在与所述槽部相对应的位置上;所述防旋转模块可以形成有与所述至少一个喷射孔部相对应的至少一个真空孔部,从而在所述手部主体和所述防旋转模块之间形成通过所述晶圆的所述槽部的从下侧到上侧的空气流。
23、根据本发明的一实施例,所述多个真空孔部中的至少一个真空孔部可以形成在与所述槽部相对应的位置上;所述防旋转模块可以形成有与所述至少一个真空孔部相对应的至少一个喷射孔部,从而在所述手部主体和所述防旋转模块之间形成通过所述晶圆的所述槽部的从上侧到下侧的空气流。
24、根据本发明另一实施例提供一种晶圆移送装置。所述晶圆移送装置可以包括:手部单元,支撑晶圆;机械臂,与所述手部单元的一侧连接,支撑所述手部单元;和机械手驱动部,将所述机械臂以垂直方向、进退方向和旋转方向中的至少一个以上的方向进行驱动;所述手部单元包括:手部主体,具有一对指臂,以能够支撑所述晶圆;悬浮模块,在所述一对指臂的支撑面上形成规定的空气流,以此向所述晶圆施加浮力,从而使所述晶圆在所述手部主体的所述一对指臂上以规定的高度悬浮,从而能够使所述一对指臂以非接触的状态支撑所述晶圆;和控制部,向所述悬浮模块施加控制信号,以能够控制通过所述悬浮模块喷射至所述一对指臂的所述支撑面的压缩空气的压力或流量、及所吸入的所述压缩空气的压力或流量,从而能够调整在所述一对指臂上悬浮的所述晶圆的所述规定的高度。
25、根据本发明又一实施例提供一种晶圆移送手部单元。所述晶圆移送手部单元可以包括:手部主体,具有从主体部朝着长度方向较长地延伸的一对指臂,以能够支撑晶圆;悬浮模块,在所述一对指臂的支撑面上形成规定的空气流,以此向所述晶圆施加浮力,从而使所述晶圆在所述手部主体的所述一对指臂上以规定的高度悬浮,从而能够使所述一对指臂以非接触的状态支撑所述晶圆;和控制部,向所述悬浮模块施加控制信号,以能够控制通过所述悬浮模块喷射至所述一对指臂的所述支撑面的压缩空气的压力或流量、及所吸入的所述压缩空气的压力或流量,从而能够调整在所述一对指臂上悬浮的所述晶圆的所述规定的高度;所述悬浮模块包括:多个喷射孔部,沿着所述手部主体的所述一对指臂形成为规定的图案,向所述一对指臂的所述支撑面的上方喷射所述压缩空气;多个真空孔部,沿着所述手部主体的所述一对指臂形成为规定的图案,吸入所述一对指臂的所述支撑面上的所述压缩空气;喷射流路,在手部主体的内部形成为流路形状,提供将要喷射至所述多个喷射孔部的所述压缩空气;和真空流路,在所述手部主体的内部形成为流路形状,向所述多个真空孔部提供真空;所述手部主体的所述一对指臂包括:下部板,形成有所述喷射流路和所述真空流路;和上部板,以与所述下部板的上表面结合的方式形成为与所述下部板对应的形状,沿着对应于在所述下部板上形成的所述喷射流路和所述真空流路的位置形成有所述多个喷射孔部和所述多个真空孔部。
26、发明的效果
27、根据如上所述的那样构成的本发明的一实施例,由于在具有能固定和支撑晶圆的一对指臂的手部主体的内部形成有两种气体管线结构,即喷射压缩空气的气压管线和能形成真空的真空管线,因此能够在一对指臂的支撑面上形成规定的空气流,从而对晶圆施加浮力并使晶圆以规定的高度悬浮在一对指臂上。
28、借助于此,能够实现具有如下效果的晶圆移送手部单元及晶圆移送装置:在为了工艺处理而进行晶圆的移送时,能够使晶圆在以规定高度悬浮于手部主体的一对指臂上的状态下以非接触的状态进行移送,从而防止晶圆背面的污染部分对手部主体造成污染,防止在进行下一个晶圆的移送时的影响性(因手部主体而造成的逆污染),此外,能够防止由于在执行晶圆的固定及拾取/安置动作时的物理接触而晶圆受到频繁的冲击所引起的累积应力所造成的损伤。当然,本发明的范围并不由这些效果所限定。
- 还没有人留言评论。精彩留言会获得点赞!