一种晶圆自动机械对中装置及方法与流程
本申请属于半导体加工,涉及晶圆键合处理,具体涉及一种晶圆自动机械对中装置及方法。
背景技术:
1、在半导体制造领域,不可避免有将晶圆基片与承载片进行键合的工艺步骤,在进行键合前,需要对晶圆进行对中处理,以保证其所在位置为正确的键合位置,这直接关系到键合工艺的精度,甚至半导体制品的性能和良劣。因此,对中处理过程中的晶圆定位是非常关键的技术,只有对晶圆位置实现精准定位并进行有目的有方向的晶圆位移,才能够实现高品质、高精度的对中效果。
2、现有技术中存在三点定位晶圆的技术,其一般是在定位块后面设置弹簧,通过三个弹簧之间的相互推拉作用使晶圆处于正中,实现柔性定位,以防止挤压损坏晶圆。但这种方式的对中精度不够高,且随着使用时间的增长,弹簧本身发生微形变,更会加剧降低对中精度,使得其无法满足高精度半导体制品的制造需求。
技术实现思路
1、本申请旨在至少在一定程度上解决上述相关技术中的技术问题之一。
2、为此,本申请的目的在于提供一种晶圆自动机械对中装置及方法,能够更精准地对晶圆位置进行限位,使其中心偏移量在一个极小的范围内,实现更高精度的对中,以满足晶圆键合领域对晶圆位置中心偏移量的高要求。
3、为了解决上述技术问题,本申请是这样实现的:
4、本申请实施例提供了一种晶圆自动机械对中装置,所述晶圆自动机械对中装置包括:
5、晶圆载台,用于承载晶圆;
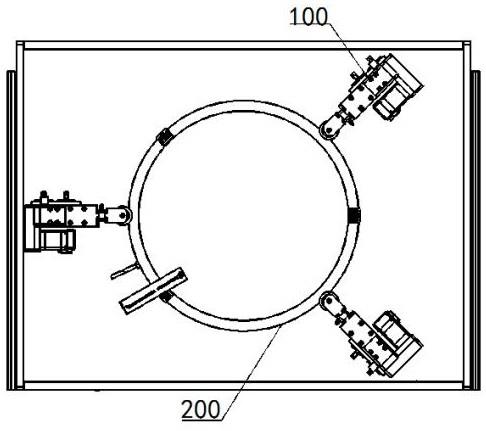
6、对中机构,其包括驱动电机、对中滚轮和力传感器,所述驱动电机与所述对中滚轮传动连接,所述驱动电机用于驱动所述对中滚轮朝向所述晶圆载台的中心移动以抵接所述晶圆,所述力传感器连接于所述对中滚轮,以在所述对中滚轮接触所述晶圆时产生力信号;其中,所述对中机构至少有三个,所述至少三个对中机构环绕所述晶圆载台间隔开地设置;以及
7、控制单元,其与所述力传感器通讯连接,所述控制单元包括信号处理模块,所述信号处理模块用于接收处理所述力信号及判断对中是否完成,并根据处理判断结果输出执行信号,所述控制单元用于根据所述执行信号控制所述对中机构的对中动作;
8、其中,当所述信号处理模块未同时接收到所述至少三个对中机构的力信号时,判断对中未完成,输出第一执行信号,所述控制单元根据所述第一执行信号控制所述至少三个对中机构回位,并在回位完成后再次执行对中动作;当所述信号处理模块同时接收到所述至少三个对中机构的力信号时,判断对中完成,输出第二执行信号,所述控制单元根据所述第二执行信号控制所述至少三个对中机构回位,并在回位完成后控制所述至少三个对中机构停止动作。
9、另外,根据本申请的晶圆自动机械对中装置,还可以具有如下附加的技术特征:
10、在其中的一些实施方式中,所述对中机构还包括电缸模组,所述驱动电机通过所述电缸模组与所述对中滚轮传动连接。
11、在其中的一些实施方式中,所述电缸模组、所述力传感器和所述对中滚轮处于同一中轴线上,所述中轴线穿过所述晶圆载台的中心。
12、在其中的一些实施方式中,所述对中机构还包括转向机构,所述驱动电机通过所述转向机构与所述电缸模组传动连接。
13、在其中的一些实施方式中,所述转向机构包括丝杠、滚珠螺母和连接杆;所述丝杠固接在所述驱动电机的电机轴上且与电机轴同轴设置,所述滚珠螺母套设在所述丝杠上,所述连接杆相对于所述丝杠垂直;且所述连接杆的一端与所述滚珠螺母固接,另一端与所述电缸模组固接。
14、在其中的一些实施方式中,所述电缸模组包括壳体、设于壳体内的驱动杆以及导向机构;
15、所述驱动杆的一端与所述连接杆固接,另一端穿过开设在所述壳体上的过孔与所述力传感器固接;所述驱动杆能够随所述连接杆的动作进行直线移动;
16、所述导向机构固设于所述壳体内部并与所述驱动杆活动连接,用于限制所述驱动杆的移动轨迹;所述驱动杆的横截面为梯形或方形,所述过孔为梯形孔或方形孔,所述驱动杆与所述过孔的尺寸匹配。
17、在其中的一些实施方式中,所述对中机构的数量为三个,三个所述对中机构环绕所述晶圆载台均匀地间隔设置。
18、在其中的一些实施方式中,所述对中机构的数量为三个,其中两个对中机构在所述晶圆载台的周向上间隔90度地设置,第三个对中机构与所述两个对中机构在所述晶圆载台的周向上分别间隔135度地设置。
19、在其中的一些实施方式中,所述晶圆自动机械对中装置还包括监测单元,用于监测所述晶圆载台上是否放置有晶圆,所述监测单元与所述控制单元电性连接,所述控制单元配置为根据所述监测单元的监测结果控制所述对中机构的启动。
20、本申请实施例还提供了一种晶圆自动机械对中方法,其采用如前所述的晶圆自动机械对中装置来实现;所述晶圆自动机械对中方法的步骤包括:
21、s1、将晶圆放置于所述晶圆载台上;
22、s2、控制单元向所述至少三个对中机构发出控制指令,控制所述至少三个对中机构同步朝向晶圆载台的中心移动,直至所述至少三个对中机构均接触所述晶圆;
23、s3、控制单元实时接收对中机构中力传感器的力信号,通过所述信号处理模块接收处理所述力信号,判断对中是否完成并输出执行信号;其中,当所述信号处理模块未同时接收到所述至少三个对中机构的力信号时,判断对中未完成,输出第一执行信号;当所述信号处理模块同时接收到所有对中机构的力信号时,判断对中完成,输出第二执行信号;
24、s4、控制单元根据接收到的执行信号控制所述至少三个对中机构动作;其中,所述控制单元接收到所述第一执行信号时,控制所有对中机构回位,并在回位完成后再次执行步骤s2-s4;所述控制单元接收到所述第二执行信号时,控制所有对中机构回位,并在回位完成后控制所有对中机构停止动作,对中完成。
25、与现有技术相比,本发明的至少具有以下有益效果:
26、本申请实施例中,所提供的晶圆自动机械对中装置采用电机+电缸模组的驱动方式,大大提高了对中过程中对中滚轮的移动精度,再结合高精度的力传感器进行对中滚轮与晶圆之间接触力的采集,通过接触力的数据来控制对中机构进行对中,能够保证对中的高精度和准确性。
27、本申请的晶圆自动机械对中方法采用所述的晶圆自动机械对中装置来实现,因而至少具有所述的晶圆自动机械对中装置的所有特征及优势,在此不再赘述。本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种晶圆自动机械对中装置,其特征在于,所述晶圆自动机械对中装置包括:
2.根据权利要求1所述的晶圆自动机械对中装置,其特征在于,所述对中机构还包括电缸模组,所述驱动电机通过所述电缸模组与所述对中滚轮传动连接。
3.根据权利要求2所述的晶圆自动机械对中装置,其特征在于,所述电缸模组、所述力传感器和所述对中滚轮处于同一中轴线上,所述中轴线穿过所述晶圆载台的中心。
4.根据权利要求2所述的晶圆自动机械对中装置,其特征在于,所述对中机构还包括转向机构,所述驱动电机通过所述转向机构与所述电缸模组传动连接。
5.根据权利要求4所述的晶圆自动机械对中装置,其特征在于,所述转向机构包括丝杠、滚珠螺母和连接杆;所述丝杠固接在所述驱动电机的电机轴上且与电机轴同轴设置,所述滚珠螺母套设在所述丝杠上,所述连接杆相对于所述丝杠垂直;且所述连接杆的一端与所述滚珠螺母固接,另一端与所述电缸模组固接。
6.根据权利要求5所述的晶圆自动机械对中装置,其特征在于,所述电缸模组包括壳体、设于壳体内的驱动杆以及导向机构;
7.根据权利要求1所述的晶圆自动机械对中装置,其特征在于,所述对中机构的数量为三个,三个所述对中机构环绕所述晶圆载台均匀地间隔设置。
8.根据权利要求1所述的晶圆自动机械对中装置,其特征在于,所述对中机构的数量为三个,其中两个对中机构在所述晶圆载台的周向上间隔90度地设置,第三个对中机构与所述两个对中机构在所述晶圆载台的周向上分别间隔135度地设置。
9.根据权利要求1-8任一项所述的晶圆自动机械对中装置,其特征在于,所述晶圆自动机械对中装置还包括监测单元,用于监测所述晶圆载台上是否放置有晶圆,所述监测单元与所述控制单元电性连接,所述控制单元配置为根据所述监测单元的监测结果控制所述对中机构的启动。
10.一种晶圆自动机械对中方法,其特征在于,采用如权利要求1至9中任意一项所述的晶圆自动机械对中装置来实现;所述晶圆自动机械对中方法的步骤包括:
技术总结
本申请公开了一种晶圆自动机械对中装置及方法,属于半导体加工技术领域。该对中装置包括:晶圆载台;对中机构,包括驱动电机、对中滚轮和力传感器;驱动电机与对中滚轮传动连接,用于驱动对中滚轮朝向晶圆载台中心移动以抵接晶圆;所述力传感器连接于对中滚轮,以在对中滚轮接触晶圆时产生力信号;其中,所述对中机构至少有三个且环绕晶圆载台间隔开设置;控制单元,用于接收处理力信号及判断对中是否完成,并根据处理判断结果输出执行信号,所述控制单元用于根据所述执行信号控制所述对中机构的对中动作。本申请可以更精准地对晶圆进行对中,使其中心偏移量在一个极小的范围内,以满足晶圆键合领域对晶圆位置中心偏移量的高要求。
技术研发人员:王正根,李会涛,常健伟,张勤超,成春荣,陈万群
受保护的技术使用者:迈为技术(珠海)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!