基于球铰-电动缸的水下电连接器插拔执行器及控制方法与流程
本技术涉及水下电能传输的,具体而言,涉及一种基于球铰-电动缸的水下电连接器插拔执行器及控制方法。
背景技术:
1、载人潜水器对水下无人航行器(简称uuv)进行电能传输是有人-无人协同作业的重要内容,对提高uuv的续航力具有重要意义。有线充电是实现水下电能传输效率最高、可靠性较强的方式。水下工况时,将分居载人潜水器与uuv的电连接器插头与插座实现对接是实现有线充电的核心技术。
2、进行电能传输前,需要进行电连接器的插合作业,但uuv与载人潜水器的相对位置存在误差,该误差会导致电连接器插头(此后简称插头)与插座位置及姿态的偏差。因此载人潜水器端需装配可对插头位置进行调整的插拔执行器,载人潜水器中有操作人员或控制装置可对插拔执行器进行调节与控制,进而对插头位置及姿态进行调整,以实现插头与插座的对准。利用插拔执行器对插头位置进行调节,是进行插合作业的重要内容。
技术实现思路
1、本发明所要解决的技术问题在于针对上述存在的问题,提供一种基于球铰-电动缸的水下电连接器插拔执行器及控制方法,利用插拔执行器对插头位置进行调节,实现插头与插座的对准。
2、本技术的实施例是这样实现的:
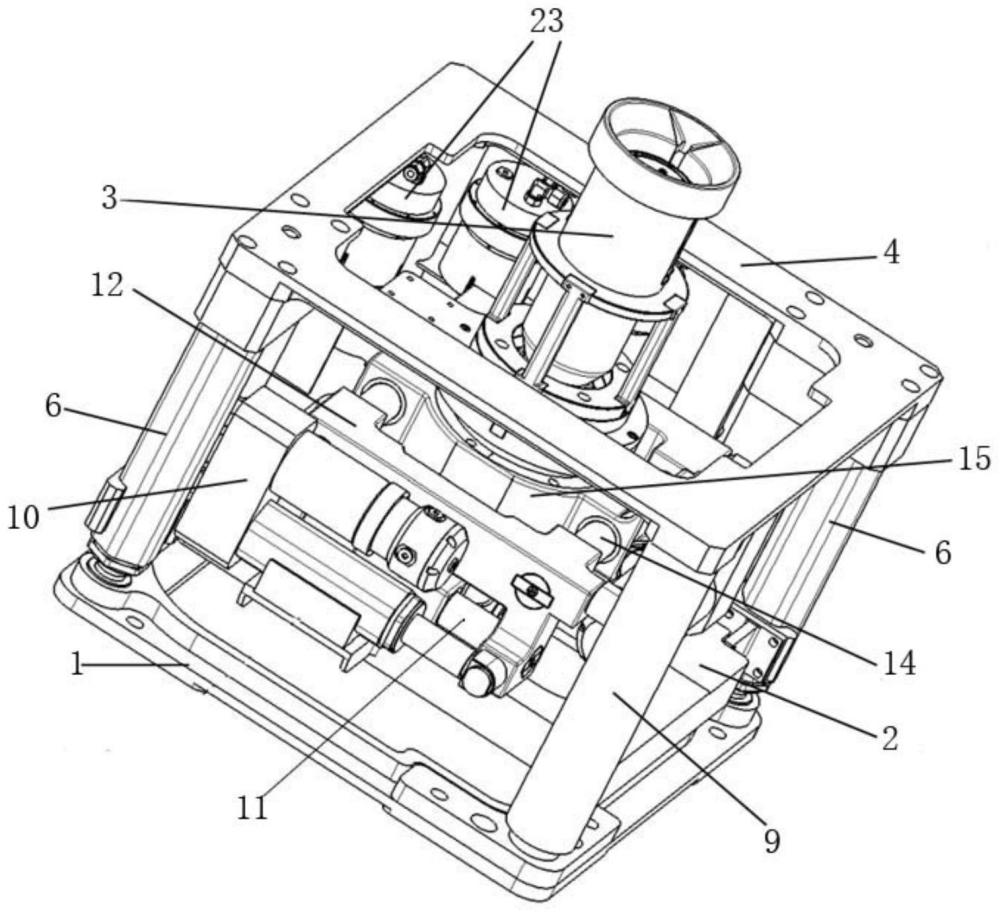
3、本技术实施例提供一种基于球铰-电动缸的水下电连接器插拔执行器,其特征在于,包括安装基座、承载台架和柔性电连接器插头,所述承载台架包括上框架面板、承载面板和z向调整机构,所述z向调整机构包括z向电动缸和z向导向组件,所述z向电动缸安设于所述上框架面板及所述安装基座相对应的一组对角位置之间,驱动承载台架沿z向移动,所述z向导向组件安设于上框架面板及安装基座的另一组对角位置之间,所述承载面板四角分别固定于对应侧的z向电动缸及z向导向组件,承载面板上设有x向调整机构和y向调整机构,所述x向调整机构带动所述y向调整机构沿x向移动;
4、所述柔性电连接器插头包括插头本体及柔性连接件,所述柔性连接件外部与所述y向调整机构相连接,所述插头本体插设于柔性连接件内部并与之相连接,y向调整机构带动柔性电连接器插头沿y向移动,承载台架通过xyz三向位移调节,带动柔性电连接器插头三向调节对准。
5、在一些可选的实施方案中,所述z向电动缸安设于所述上框架面板底面上,伸缩杆端头连接所述安装基座顶面;所述z向导向组件包括固定于所述安装基座上的导向杆及固定于所述上框架面板上的导向筒。
6、在一些可选的实施方案中,所述x向调整机构包括x向电动缸、x向导轨和x向滑台,所述x向电动缸固定于所述承载面板上,所述x向导轨通过x向滑轨安装架固定于承载面板上,所述x向滑台与x向导轨相配置连接,x向电动缸的伸缩杆的端头连接x向滑台,带动x向滑台沿x向导轨滑动。
7、在一些可选的实施方案中,所述y向调整机构包括y向电动缸、y向导轨和y向滑台,所述y向导轨固定于所述x向滑台上,所述y向电动缸固定于所述y向滑台上,所述y向滑台与y向导轨相配置连接,y向电动缸的伸缩杆的端头连接x向滑台,带动y向滑台沿y向导轨滑动,所述柔性电连接器插头固定于y向滑台上。
8、在一些可选的实施方案中,所述柔性连接件包括插头套筒、球铰关节、固定筒和扶正筒,所述球铰关节顶部设有顶盖,底部与所述扶正筒顶部相连接,所述固定筒上部设有球形空腔,与所述球铰关节套接,固定筒下部外套于扶正筒,所述插头套筒外套于所述插头本体并与之相连接,插头套筒的底部与球铰关节的顶盖相连接,固定筒底部内壁沿周向均匀间隔设有多个弹簧容置腔,所述弹簧容置腔内设有中心柱,所述中心柱上套设径向弹簧,所述径向弹簧的两端分别连接固定筒及扶正筒的筒壁,固定筒与扶正筒形成的环状空间内设有两根旋转弹簧,所述旋转弹簧的两端分别连接固定筒及扶正筒的筒壁。
9、在一些可选的实施方案中,所述承载台架上设有压力补偿器,分别与所述x向电动缸、y向电动缸及z向电动缸相连通;承载台架上还设有多根加强筋。
10、在一些可选的实施方案中,还包括控制系统所述x向电动缸、y向电动缸及z向电动缸上分别设有伸缩杆行程传感器,所述伸缩杆行程传感器与插拔控制器的输入端相联,所述插拔控制器的输出端分别与x向电动缸、y向电动缸及z向电动缸相联。
11、基于球铰-电动缸的水下电连接器插拔执行器的使用方法,其特征在于,包括如下步骤:
12、步骤a,插拔控制器根据操作人员的操作或上级系统指令,向插拔执行器传输位置指令[rx,ry,rz],插拔控制器判断插拔执行器的工作状态,发出工作或检修指令p,接收各行程传感器的推杆行程测量值x、y、z1、z2;
13、步骤b,插拔控制器计算位置指令值与测量值之间的差值,判断x向电动缸、y向电动缸及z向电动缸的行程量,分别进行三向位置移动控制。
14、在一些可选的实施方案中,所述工作或检修指令p分为如下三种:
15、若p=0则表示电连接器处于“正常”状态;
16、若p=1则表示电连接器处于“卡滞”状态,进行检修,插拔控制器判断退出卡滞状态后,则将p值设置为p=0;
17、若p=2则表示电连接器处于“插合到位”状态,此时若对插头进行拔出操作,则将p值设置为p=0。
18、在一些可选的实施方案中,所述三向位置移动控制包含以下步骤:
19、步骤a,x向移动控制:
20、步骤a1,x向传感器对x向电动缸的推杆行程进行采集,获得推杆行程值x;
21、步骤a2,rx与x进行减法运算,获得差值ex;
22、步骤a3,差值ex输入至插拔控制器,插拔控制器经过其控制算法运算得到电流指令值rix;
23、步骤a4,插拔控制器发出指令信号p,若p=0,为正常插拔状态,电流指令值rix输入至x向电动缸,x向电动缸将电流指令rix生成为绕组电流ix;在绕组电流ix的作用下,x向电动缸的推杆产生移动,即其行程x更新,电连接器插头的x方向位置产生变化;
24、若p=1,为卡滞状态,插拔控制器使推杆回退;
25、若p=2,为到位状态,封锁驱动器输出,使x向电动缸处于随动状态;
26、步骤b,y向移动控制:
27、步骤b1,y向传感器对y向电动缸的推杆行程进行采集,获得推杆行程值y;
28、步骤b2,ry与y进行减法运算,获得差值ey;
29、步骤b3,差值ey输入至插拔控制器,插拔控制器经过其控制算法运算得到电流指令值riy;
30、步骤b4,插拔控制器发出指令信号p,若p=0,为正常插拔状态,电流指令值riy输入至y向电动缸,y向电动缸将电流指令riy生成为绕组电流iy;在绕组电流iy的作用下,y向电动缸的推杆产生移动,即其行程y更新,插头的y方向位置产生变化;
31、若p=1,为卡滞状态,插拔控制器使推杆回退;
32、若p=2,为到位状态,封锁驱动器输出,使y向电动缸处于随动状态;
33、步骤c,z向移动控制:
34、步骤c1,z向传感器对两个z向电动缸的推杆行程进行采集,获得推杆行程值z1、z2;
35、步骤c2,rz1、rz2分别与推杆行程值z1、z2做减法,生成差值e1与e2;
36、步骤c3,差值e1与e2输入至插拔控制器,插拔控制器经过其控制算法运算得到电流指令值riz1、riz2;
37、步骤c4,插拔控制器发出指令信号p,若p=0,为正常插拔状态,则电流指令值riz1和riz2输入至插拔控制器,插拔控制器将电流指令riz1和riz2生成为绕组电流iz1、iz2,在绕组电流iz1、iz2的作用下,z1电动缸、z2电动缸的推杆产生移动;
38、若p=1,为卡滞状态,插拔控制器使推杆回退;
39、若p=2,为到位状态,封锁驱动器输出,使z1电动缸、z2电动缸处于随动状态。
40、本技术的有益效果是:本发明提供一种基于球铰-电动缸的水下电连接器插拔执行器及控制方法,载人潜水器与uuv进行传输电能作业时,在插合作业前对电连接器插头位置进行调节而对准,可对存在对准误差的情况下实现插合,进而实现插合作业而实现电能可靠传输;同时柔性连接的电连接器插头,在偏差对准时可以进行一定范围的位置补偿,且在插合后适应uuv可能出现的晃动,避免插拔执行器和电连接器插头、插座损坏。
- 还没有人留言评论。精彩留言会获得点赞!