一种高压开关柜自动化紧急分闸打跳装置的制作方法
本发明涉及开关柜自动化执行动作机构装置领域。
背景技术:
1、高压开关柜,广泛应用于10kv、35kv、110kv等各级电网中,是电力系统的重要设备,用作接受与分配电能之用,具体通常是用于切断和接通负荷电路以及切断故障电路。可根据电网运行需要将一部分电力设备或线路投入或退出运行,也可在电力设备或线路发生故障时将故障部分从电网中快速切除,从而防止事故扩大,保证设备和运行维护人员的安全,也能保证电网中无故障部分的正常运行。
2、在遇有发生影响高压断路器分闸异常故障时,后台会发送分闸指令,高压开关柜进行分闸,但是在发生断路器拒分(拒分是高压开关柜其中一种典型故障,即监控后台不能正常控制分闸)故障时,会出现远方正常分闸失效,此情况下,会有巨大安全隐患,需要快速响应处理,因此需要就地紧急分闸,变电运维、检修人员或调度人员等工作人员必须立即分闸停电处理高压开关柜,通常通过按钮操作杆深入开关柜内快速按下跳闸按钮来达到就地紧急分闸的目的,这种人员直接操作应急分闸按钮由于操作人员距离高电压太近,又没有很好的防范措施,容易出现异常情况下对操作人员造成伤害、危急人身安全的问题,同时人员不能第一时间发现问题,判断问题。
3、随着高科技产品的快速发展,可代替人工巡检操作的机器人也在不断的投入各行各业中应用,其中就包括在电力系统中开关柜的巡检操作的应用,机器人要动作达到所需的操作还需有对应的执行机构装置来实现,但是目前还有能够适应上述的情况所需使用的执行机构装置,因此,虽然有机器人可代替人员投入隐患环境内作业,但是由于没有有效适应操作的执行机构装置,目前情况还是由人员进行上述方式的处理,因而,现亟需有一种能够在出现监控后台无法对高压断路器正常分闸时,有效代替人员执行动作安全解决故障状况的机构装置,本案由此产生。
技术实现思路
1、本发明的目的在于提供一种能够用于智能机器人对接传动执行操作,有效代替人工动作紧急分闸打跳动作的一种高压开关柜自动化紧急分闸打跳装置。
2、为实现上述目的,本发明的技术方案是:一种高压开关柜自动化紧急分闸打跳装置,包括安装座以及设置在安装座上供机器人的工作臂定位对接的对接结构、供从机器人的工作臂卸下定位稳定放置的放置连接结构、供执行分闸打跳动作的按钮操作杆和用于连接动作驱动源传动按钮操作杆动作的传动结构。
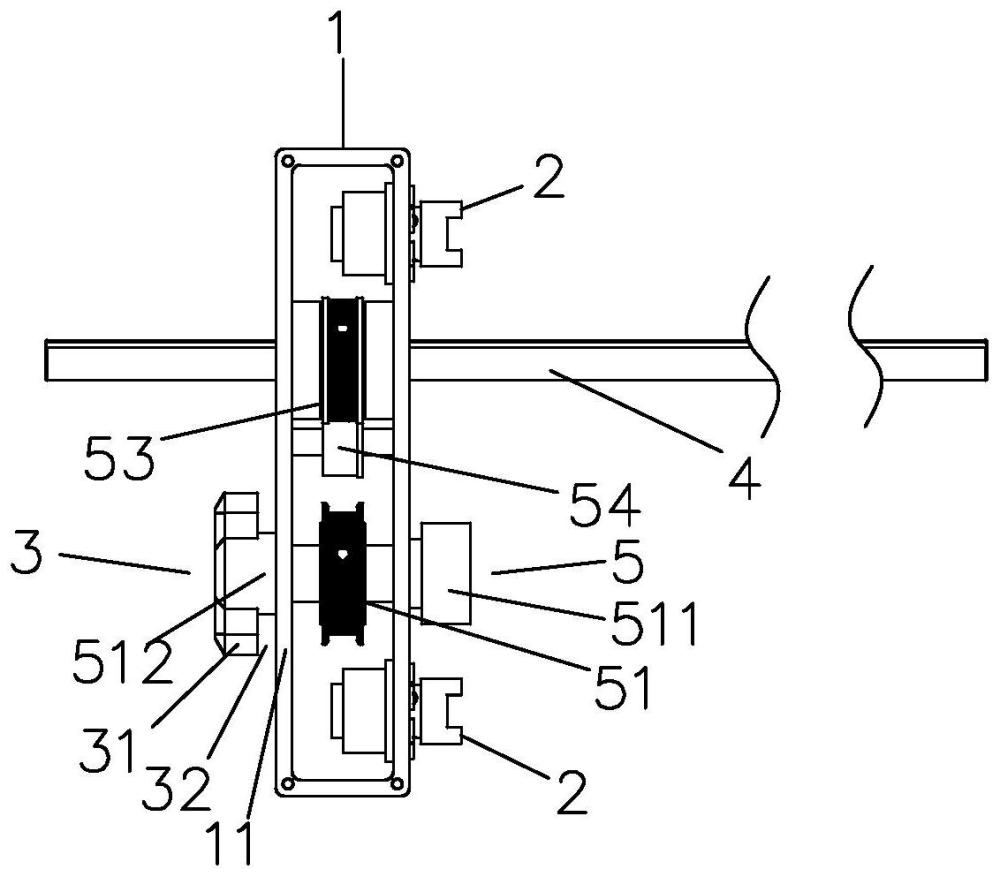
3、所述按钮操作杆为滚珠丝杆,所述传动结构包括可转动架设在安装座上的主动轮、可转动架设在安装座上的丝杆螺母、固定套设在丝杆螺母外的从动轮和绕设在主动轮和从动轮上的同步传动带,所述滚珠丝杆匹配穿设在丝杆螺母内,所述主动轮的轮轴一端为驱动源连接端,通过主动轮的转动带动从动轮和丝杆螺母的转动从而使得滚珠丝杆轴向伸出或退回活动。
4、所述传动结构还包括可调整架设在安装座上用于张紧同步传动带的张紧轮。
5、所述主动轮的轮轴另一端为放置连接端,所述放置连接结构为放置连接端架设的安装座上为一稳定放置块并且放置连接端延伸穿出至稳定放置块外侧的末端上固定连接有连接夹臂,所述连接夹臂垂直于主动轮的轮轴,所述连接夹臂与稳定放置块之间间隔开形成嵌入夹住空间。
6、所述对接结构为安装座的一侧面相对两端上分别设有水平对应的对接头,所述对接头为快速拔插对接头。
7、所述安装座为一方型盒体,所述主动轮、从动轮、丝杆螺母和张紧轮设置在方型盒体内,所述对接头和驱动源连接端对应设置在方型盒体的同一侧外侧面,所述连接夹臂设置在与驱动源连接端相对的另一侧。
8、通过采用上述技术方案,本发明的有益效果是:上述紧急分闸打跳装置在不使用时通过放置连接结构稳定锁固放置在移动机器人本体上携带移动,需要使用时,机器人的机械臂末端执行机构通过对接机构对接连接并解除放置连接结构的锁合,即可对接安装在机械臂末端执行机构上,随机器人移动到达指定位置,机器人控制机械臂夹爪至分闸旋钮的位置,控制夹爪夹持操作旋钮顺时针转动后保持姿态,通过传动结构的传动,使得按钮操作杆动作伸出至高压开关柜内部按压分闸操作按钮,操作结束后,可以自动及时复位,保证作业人员的安全,施工效率高,操作方便,从而实现本发明的上述目的。上述进一步的结构设置,可使得装置整体结构简单、体积小、易精准定位对接、放置和传动执行操作动作,且结构和操作动作稳定可靠。
9、相对于人工使用按钮操作杆执行高压开关紧急分闸动作,本发明的一种高压开关柜自动化紧急分闸打跳装置有提升安全性、利于远程控制、安全可靠可追溯、可模块化设计、可隔离化设计等几个方面的优点。
技术特征:
1.一种高压开关柜自动化紧急分闸打跳装置,其特征在于,包括安装座以及设置在安装座上供机器人的工作臂定位对接的对接结构、供从机器人的工作臂卸下定位稳定放置的放置连接结构、供执行分闸打跳动作的按钮操作杆和用于连接动作驱动源传动按钮操作杆动作的传动结构。
2.如权利要求1所述的一种高压开关柜自动化紧急分闸打跳装置,其特征在于,所述按钮操作杆为滚珠丝杆,所述传动结构包括可转动架设在安装座上的主动轮、可转动架设在安装座上的丝杆螺母、固定套设在丝杆螺母外的从动轮和绕设在主动轮和从动轮上的同步传动带,所述滚珠丝杆匹配穿设在丝杆螺母内,所述主动轮的轮轴一端为驱动源连接端,通过主动轮的转动带动从动轮和丝杆螺母的转动从而使得滚珠丝杆轴向伸出或退回活动。
3.如权利要求2所述的一种高压开关柜自动化紧急分闸打跳装置,其特征在于,所述传动结构还包括可调整架设在安装座上用于张紧同步传动带的张紧轮。
4.如权利要求2或3所述的一种高压开关柜自动化紧急分闸打跳装置,其特征在于,所述主动轮的轮轴另一端为放置连接端,所述放置连接结构为放置连接端架设的安装座上为一稳定放置块并且放置连接端延伸穿出至稳定放置块外侧的末端上固定连接有连接夹臂,所述连接夹臂垂直于主动轮的轮轴,所述连接夹臂与稳定放置块之间间隔开形成嵌入夹住空间。
5.如权利要求1、2或3所述的一种高压开关柜自动化紧急分闸打跳装置,其特征在于,所述对接结构为安装座的一侧面相对两端上分别设有水平对应的对接头,所述对接头为快速拔插对接头。
6.如权利要求4所述的一种高压开关柜自动化紧急分闸打跳装置,其特征在于,所述对接结构为安装座的一侧面相对两端上分别设有水平对应的对接头。
7.如权利要求4所述的一种高压开关柜自动化紧急分闸打跳装置,其特征在于,所述安装座为一方型盒体,所述主动轮、从动轮、丝杆螺母和张紧轮设置在方型盒体内,所述对接头和驱动源连接端对应设置在方型盒体的同一侧外侧面,所述连接夹臂设置在与驱动源连接端相对的另一侧。
技术总结
本发明涉及开关柜自动化执行动作机构装置领域,具体是公开一种高压开关柜自动化紧急分闸打跳装置,包括安装座以及设置在安装座上供机器人的工作臂定位对接的对接结构、供从机器人的工作臂卸下定位稳定放置的放置连接结构、供执行分闸打跳动作的按钮操作杆和用于连接动作驱动源传动按钮操作杆动作的传动结构。上述紧急分闸打跳装置能够用于智能机器人对接传动执行操作,可有效代替人工动作紧急分闸打跳动作。
技术研发人员:李洪,朱晨亮,刘宗茂,成仕强,黄维,邹炯斌,林海,林业桂,曾向荣,刘畅,赵霞
受保护的技术使用者:泉州通维科技有限责任公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!