晶圆取放对中装置的制作方法
本技术涉及半导体制造,尤其涉及一种晶圆取放对中装置。
背景技术:
1、在半导体制程中,晶圆从某一工序加工完成传递至下一工序前需要预先对中,之后晶圆传送机器人从光学对中单元取片传送至下一加工工位。但是在某些情形下,预先对中的传递路径往往需要多个机器人交接,或者受机台调度限制传递需要等待,导致浪费了大量的时间以及降低了产能。
2、另外,在两种工位的载具上适用的机器人的机器手指不一样,例如光学对中单元的吸盘只能使用y形手指上下料,而其他工位需要用i形手指上下料,机器人在两者间传递物料需要在缓存区放置晶圆后倒换手指,耗费时间,且多手指机器人价格较高,设备整体成本因此上升。
技术实现思路
1、本实用新型的目的在于提供一种晶圆取放对中装置,提高了晶圆取放的效率,降低了设备成本。
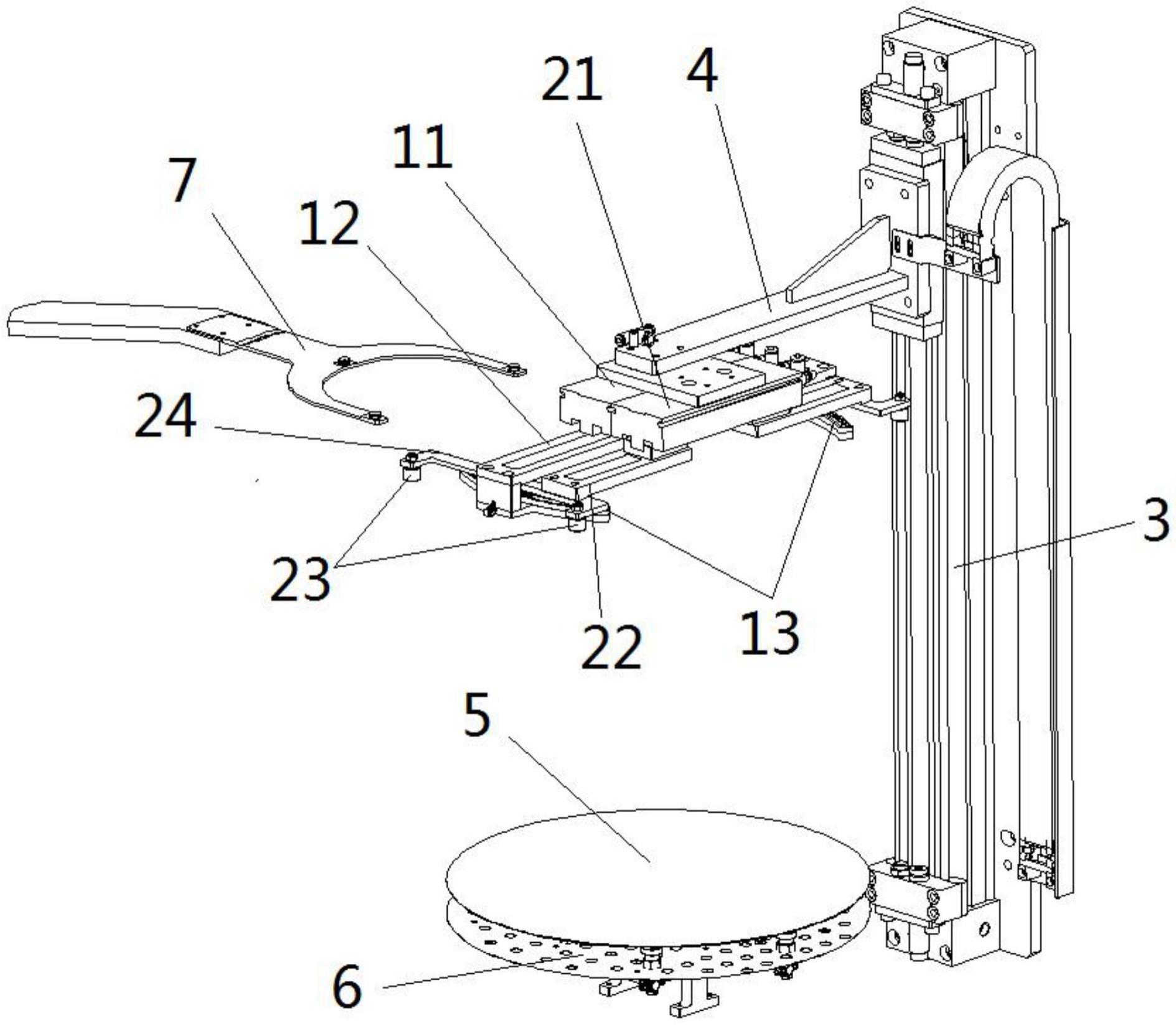
2、为实现上述目的,第一方面,本实用新型提供了一种晶圆取放对中装置,包括取放机构和调整机构;
3、所述调整机构可移动的设于所述取放机构的两侧,用于调整所述取放机构上晶圆的位置;
4、所述取放机构用于取放晶圆。
5、在一些实施例中,所述调整机构包括第一动力器、相对设置的第一连接件和调整件;
6、所述第一连接件的一端与所述第一动力器连接,以使所述第一动力器带动所述第一连接件移动;
7、所述调整件设于所述第一连接件的另一端,且位于所述取放机构的外侧边,用于抵接所述晶圆的侧壁以调整所述晶圆的位置。
8、在一些实施例中,所述调整件为轴承,所述轴承可转动的设于所述第一连接件的另一端。
9、在一些实施例中,所述取放机构包括第二动力器、相对设置的第二连接件和取放件;
10、所述第二连接件的一端与所述第二动力器连接,以使所述第二动力器带动所述第二连接件移动;
11、所述取放件设于所述第二连接件的另一端,且靠近所述调整件,用于取放晶圆。
12、在一些实施例中,还包括升降模组和连接臂;
13、所述升降模组上设有所述连接臂,所述升降模组用于带动所述连接臂升降;
14、所述第一动力器和所述第二动力器并排设置在所述连接臂上。
15、在一些实施例中,所述取放件为弧形吸盘,所述弧形吸盘与所述晶圆接触的表面开设有沟槽,所述沟槽内开设有通气孔,所述通气孔用于与真空通道连通。
16、在一些实施例中,所述调整机构还包括延伸件,所述延伸件与所述第一连接件的另一端连接,所述延伸件的两端分别设有所述调整件。
17、在一些实施例中,所述延伸件位于所述第一连接件和所述取放件之间。
18、在一些实施例中,还包括载具,所述载具与所述调整机构同心设置,所述载具用于承载所述晶圆。
19、在一些实施例中,所述第一动力器和所述第二动力器均为夹爪气缸。
20、本实用新型提供的晶圆取放对中装置的有益效果在于:通过采用调整机构调整取放机构抓取晶圆时晶圆的位置,以使晶圆在运输过程中预先对中定位,提高了晶圆取放的效率。另外,使用本装置后不需要额外再增加物料缓存装置,减小了设备空间,并且适用于不同的晶圆传送机器人,从而降低了设备成本。
技术特征:
1.一种晶圆取放对中装置,其特征在于,包括取放机构和调整机构;
2.根据权利要求1所述的晶圆取放对中装置,其特征在于,所述调整机构包括第一动力器、相对设置的第一连接件和调整件;
3.根据权利要求2所述的晶圆取放对中装置,其特征在于,所述调整件为轴承,所述轴承可转动的设于所述第一连接件的另一端。
4.根据权利要求2或3所述的晶圆取放对中装置,其特征在于,所述取放机构包括第二动力器、相对设置的第二连接件和取放件;
5.根据权利要求4所述的晶圆取放对中装置,其特征在于,还包括升降模组和连接臂;
6.根据权利要求4所述的晶圆取放对中装置,其特征在于,所述取放件为弧形吸盘,所述弧形吸盘与所述晶圆接触的表面开设有沟槽,所述沟槽内开设有通气孔,所述通气孔用于与真空通道连通。
7.根据权利要求6所述的晶圆取放对中装置,其特征在于,所述调整机构还包括延伸件,所述延伸件与所述第一连接件的另一端连接,所述延伸件的两端分别设有所述调整件。
8.根据权利要求7所述的晶圆取放对中装置,其特征在于,所述延伸件位于所述第一连接件和所述取放件之间。
9.根据权利要求1所述的晶圆取放对中装置,其特征在于,还包括载具,所述载具与所述调整机构同心设置,所述载具用于承载所述晶圆。
10.根据权利要求4所述的晶圆取放对中装置,其特征在于,所述第一动力器和所述第二动力器均为夹爪气缸。
技术总结
本技术提供了一种晶圆取放对中装置,包括取放机构和调整机构,所述调整机构可移动的设于所述取放机构的两侧,用于调整所述取放机构上晶圆的位置,所述取放机构用于取放晶圆。本技术通过采用调整机构调整取放机构抓取晶圆时晶圆的位置,以使晶圆在运输过程中预先对中定位,提高了晶圆取放的效率。另外,使用本装置后不需要额外再增加物料缓存装置,减小了设备空间,并且适用于不同的晶圆传送机器人,从而降低了设备成本。
技术研发人员:孙璞,温海涛,王金龙,孙振聪
受保护的技术使用者:沈阳芯源微电子设备股份有限公司
技术研发日:20230228
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!