脚踏开关系统的制作方法
本技术涉及医疗器械领域,具体而言,涉及一种脚踏开关系统。
背景技术:
1、目前,现有的骨科手术机器人通常配备有多个脚踏开关,多个脚踏开关分别用于实现不同的手术功能,例如,在进行手术配准时,需要一个脚踏开关通过点触来控制探针对患者骨骼进行描点的操作;在进行手术截骨时,需要通过另一个脚踏开关来实现对动力系统中摆锯组件或骨钻组件的控制。由于两个脚踏开关的实现原理不同,且两个脚踏开关的接口结构也不一致,在手术过程中,操作者需要进行插头辨别和确认,甚至在某些手术过程中还需要切换脚踏开关,增加了操作者的操作时间,降低了手术效率。
2、针对现有技术中手术效率低的技术问题,目前尚未提出有效的解决方案。
技术实现思路
1、本实用新型的主要目的在于提供一种脚踏开关系统,以至少解决手术效率低的技术问题。
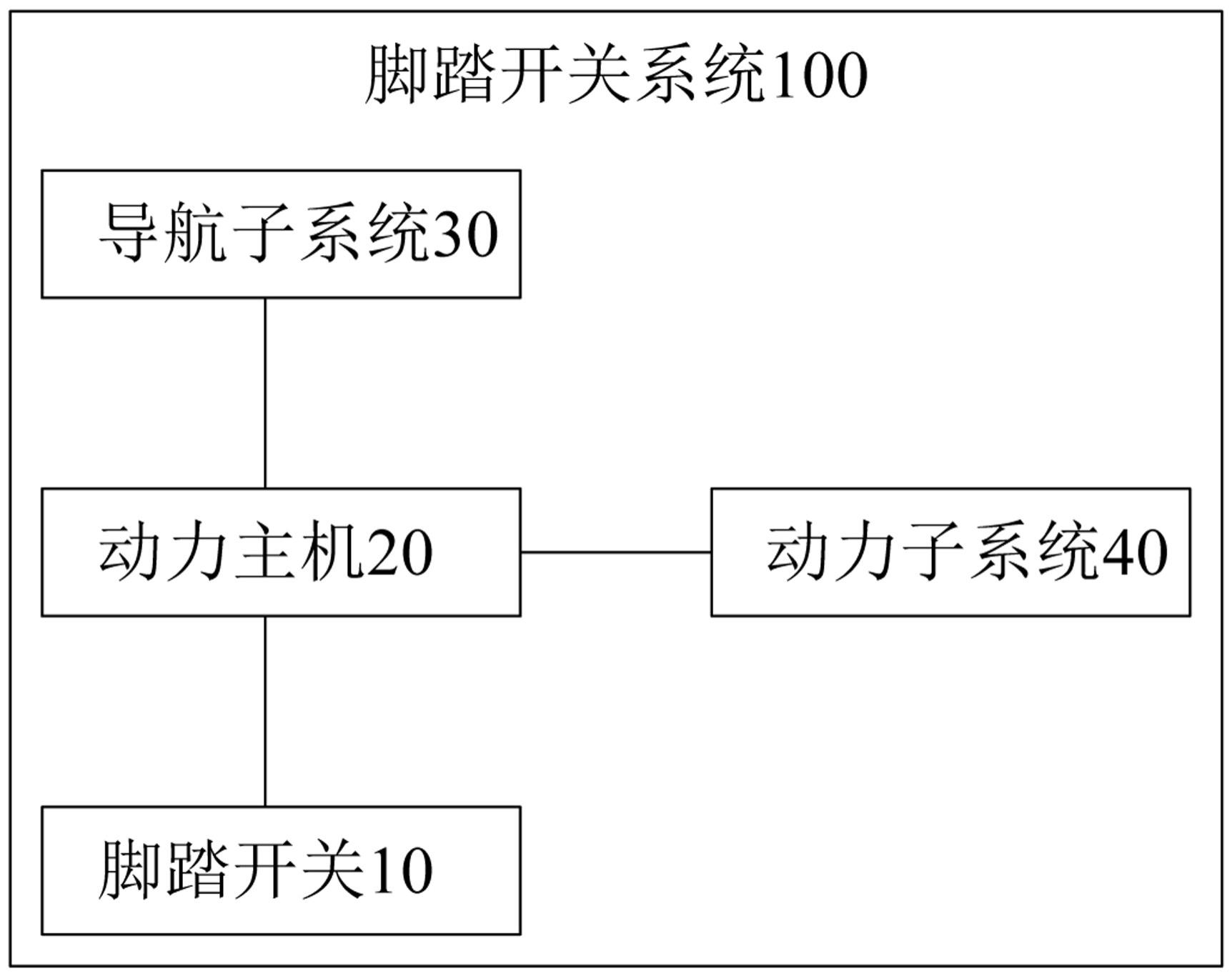
2、为了实现上述目的,根据本实用新型的一个方面,提供了一种脚踏开关系统。该脚踏开关系统包括:动力主机、导航子系统、动力子系统以及脚踏开关,其中,脚踏开关,用于触发模拟信号;动力主机,与脚踏开关连接,用于将模拟信号传输至动力子系统,或者将模拟信号对应的数字信号传输至导航子系统;导航子系统,与动力主机连接,用于基于数字信号进行手术配准;动力子系统,与动力主机连接,用于基于模拟信号进行手术截骨或者手术钻孔。
3、可选地,脚踏开关系统还包括:模拟信号输入电路和模拟信号输出电路,其中,模拟信号输入电路,一端与脚踏开关连接,另一端与动力主机连接,用于将模拟信号传输至动力主机;模拟信号输出电路,一端与动力子系统连接,另一端与动力主机连接,用于将模拟信号传输至动力子系统。
4、可选地,动力子系统至少包括:摆锯组件和骨钻组件,其中,摆锯组件与模拟信号输出电路连接,用于执行手术截骨;骨钻组件与模拟信号输出电路连接,用于执行进行手术钻孔。
5、可选地,动力子系统还包括:第一驱动器和第二驱动器,其中,第一驱动器,一端与模拟信号输出电路连接,另一端与骨钻组件连接,用于控制骨钻组件转动;第二驱动器,一端与模拟信号输出电路连接,另一端与摆锯组件连接,用于控制摆锯组件摆动。
6、可选地,骨钻组件包括:骨钻插座,连接于骨钻组件与第一驱动器之间。
7、可选地,摆锯组件包括:摆锯插座,连接于摆锯组件与第二驱动器之间。
8、可选地,动力主机包括:工业信号采集卡,用于采集所述模拟信号。
9、可选地,动力主机还包括:状态控制器,用于切换执行手术配准、手术截骨或者手术钻孔的程序状态。
10、可选地,脚踏开关系统还包括:通用串行串口总线,连接于导航子系统与动力主机之间。
11、可选地,脚踏开关包括:脚踏开关插口,连接于脚踏开关与模拟信号输入电路之间。
12、在本实用新型中,脚踏开关系统包括动力主机、导航子系统、动力子系统以及脚踏开关,其中,脚踏开关,用于触发模拟信号;动力主机,与脚踏开关连接,用于将模拟信号传输至动力子系统,或者将模拟信号转化为数字信号,传输至导航子系统;导航子系统,与动力主机连接,用于基于模拟信号进行手术配准;动力子系统,与动力主机连接,用于基于数字信号进行手术截骨或者手术钻孔。也就是说,在本实用新型中,将不同的手术模式与脚踏开关触发的不同的模拟信号之间进行关联,这样通过一个脚踏开关就可以控制不同的子系统工作在相应的手术模式下,在手术过程中,无需操作者切换脚踏开关,达到了节约手术时间的目的,进而实现了提升手术效率的技术效果,解决了手术效率低的技术问题。
技术特征:
1.一种脚踏开关系统,其特征在于,所述脚踏开关系统包括:动力主机、导航子系统、动力子系统和脚踏开关,其中,
2.根据权利要求1所述的脚踏开关系统,其特征在于,所述脚踏开关系统还包括:模拟信号输入电路和模拟信号输出电路,其中,
3.根据权利要求1所述的脚踏开关系统,其特征在于,所述动力子系统至少包括:摆锯组件和骨钻组件,其中,
4.根据权利要求3所述的脚踏开关系统,其特征在于,所述动力子系统还包括:第一驱动器和第二驱动器,其中,
5.根据权利要求4所述的脚踏开关系统,其特征在于,所述骨钻组件还包括:骨钻插座,连接于所述骨钻组件与所述第一驱动器之间。
6.根据权利要求4所述的脚踏开关系统,其特征在于,所述摆锯组件还包括摆锯插座,连接于所述摆锯组件与所述第二驱动器之间。
7.根据权利要求1所述的脚踏开关系统,其特征在于,所述动力主机包括:
8.根据权利要求7所述的脚踏开关系统,其特征在于,所述动力主机还包括:
9.根据权利要求1所述的脚踏开关系统,其特征在于,所述脚踏开关系统还包括:
10.根据权利要求1所述的脚踏开关系统,其特征在于,所述脚踏开关包括:脚踏开关插口,连接于所述脚踏开关与所述模拟信号输入电路之间。
技术总结
本技术公开了一种脚踏开关系统。该脚踏开关系统包括:动力主机、导航子系统、动力子系统以及脚踏开关,其中,脚踏开关,用于触发模拟信号;动力主机,与脚踏开关连接,用于将模拟信号传输至动力子系统,或者将模拟信号对应的数字信号传输至导航子系统;导航子系统,与动力主机连接,用于基于数字信号进行手术配准;动力子系统,与动力主机连接,用于基于模拟信号进行手术截骨或者手术钻孔。通过本技术,达到了节约手术时间的目的,实现了提升手术效率的技术效果。
技术研发人员:王远,李文龙,刘志成,李文凯
受保护的技术使用者:北京壹点灵动科技有限公司
技术研发日:20230302
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!