一种多工位端子上料旋转压着设备的制作方法
本技术涉及电线与端子组装加工设备,尤其涉及一种多工位端子上料旋转压着设备。
背景技术:
1、作为电子电路设备的重要耗材,电线已被广泛应用于传统汽车及新能源汽车等领域的信号传输或电源连接中,为了使电器线路连接方便、快捷,人们通常使用接线端子。在固定连接电线端子时,一般采用端子压着机,即利用动力驱动机构带动冲头上下运动挤压端子和电线头,使它们产生局部变形而紧紧扣合在一起。现有技术中,常见的端子压着机在遇到有多种规格的电线需要压接多种规格端子的情况时,只能通过安装多台压着装置或更换不同规格的压接模具等方式解决,而这些应用方式不仅耗费成本较高、占用空间较大,而且存在冲压等待时间长、冲压效率较低、调试时间长、更换模具频繁等问题。
技术实现思路
1、本实用新型要解决的技术问题在于,针对现有技术的不足,提供一种可同时装载多种规格的端子,能实现对相应端子的灵活取用,节省空间和成本、易于安装调试、有利于提高工作效率的多工位端子上料旋转压着设备。
2、为解决上述技术问题,本实用新型采用如下技术方案。
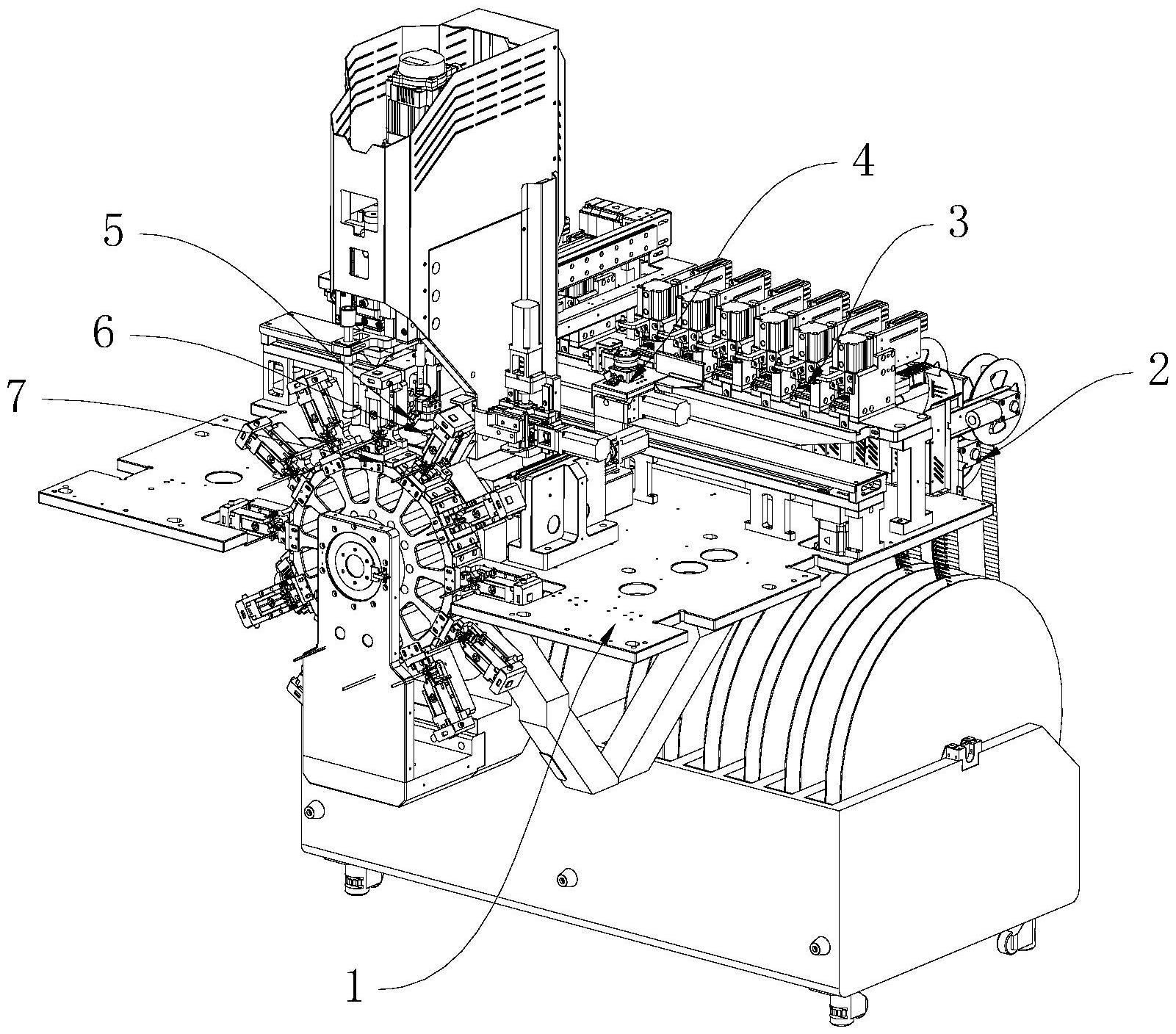
3、一种多工位端子上料旋转压着设备,其包括有机台,所述机台的后端设有多组供料机构,所述机台上设有多个上料机构、横向移送机构、纵向移送机构、端子交接机构和旋转压着机构,所述上料机构与所述供料机构一一对应且相邻设置,所述供料机构用于提供端子料带,所述上料机构用于从所述供料机构取出所述端子料带以及切断所述端子料带前端的端子,所述横向移送机构用于横向运动至指定位置的所述上料机构前侧,从所述上料机构取出端子并移送至所述纵向移送机构的相邻处,所述纵向移送机构用于从所述横向移送机构接取所述端子并纵向运动至所述端子交接机构的相邻处,所述端子交接机构用于从所述纵向移送机构接取所述端子并移送至所述旋转压着机构的压着工位,待电线置于所述端子之内时,借由所述旋转压着机构将所述端子挤压扣合于所述电线上。
4、优选地,所述供料机构包括有料卷和驱动辊,所述料卷内的所述端子料带在所述驱动辊带动下将端子料带与纸带分离。
5、优选地,所述横向移送机构包括有横向运动模组,所述横向运动模组的横向运动端设有能够在预设角度内摆动的换向机构,所述换向机构的运动端设有横向移送夹爪,所述横向移送夹爪用于从所述上料机构夹取端子。
6、优选地,所述换向机构的运动端固定有倒l形压板,所述倒l形压板的水平部向所述换向机构的顶部方向延伸,所述横向移送夹爪安装于所述倒l形压板的竖直部。
7、优选地,所述上料机构的切料运动端设有随动支臂,所述随动支臂的端部设有随动压头,当所述换向机构带动所述横向移送夹爪旋转运动至所述上料机构的相邻处并夹紧端子边缘时,所述上料机构执行切断动作,所述随动支臂跟随该切断动作压紧于所述倒l形压板的水平部。
8、优选地,所述纵向移送机构包括有纵向运动模组,所述纵向运动模组的纵向运动端设有向下延伸的纵向运动支臂,所述纵向运动支臂的下端设有纵向运动夹爪,所述纵向运动夹爪用于夹取所述端子。
9、优选地,所述端子交接机构包括有前后运动模组,所述前后运动模组的运动端设有升降运动模组,所述升降运动模组的运动端设有左右运动模组,所述左右运动模组的运动端设有用于夹取所述端子的端子交接夹爪。
10、优选地,所述端子交接机构包括与所述机台固定连接的底座,所述前后运动模组固定于所述底座上,所述前后运动模组的运动端设有立板,所述升降运动模组固定于所述立板上。
11、优选地,所述左右运动模组的运动端固定有交接支板,所述交接支板向所述纵向移送机构方向伸出,所述端子交接夹爪安装于所述交接支板上。
12、一种多工位端子上料旋转压着工艺,所述工艺基于一设备实现,所述设备包括有机台,所述机台的后端设有多组供料机构,所述机台上设有多个上料机构、横向移送机构、纵向移送机构、端子交接机构和旋转压着机构,所述上料机构与所述供料机构一一对应且相邻设置,所述工艺包括如下步骤:步骤s1,所述供料机构向所述上料机构提供端子料带;步骤s2,所述上料机构从所述供料机构取出所述端子料带,并逐一切断所述端子料带前端的端子;步骤s3,所述横向移送机构横向运动至指定位置的所述上料机构前侧,夹持所述上料机构上的待切端子,并在所述上料机构切断所述端子后,所述横向移送机构从所述上料机构取出端子并移送至所述纵向移送机构的相邻处;步骤s4,所述纵向移送机构从所述横向移送机构接取所述端子,之后纵向运动至所述端子交接机构的相邻处;步骤s5,所述端子交接机构从所述纵向移送机构接取所述端子,之后移送至所述旋转压着机构的压着工位;步骤s6,待电线置于所述旋转压着机构压着工位的端子之内时,借由所述旋转压着机构将所述端子挤压扣合于所述电线上。
13、本实用新型公开的多工位端子上料旋转压着设备,在执行过程中,首先将不同规格端子的料卷装载于所述供料机构,由所述供料机构向所述上料机构提供端子料带,当所述上料机构从所述供料机构取出所述端子料带时,可逐一切断所述端子料带前端的端子,由所述横向移送机构夹持所述上料机构上的待切端子,并在所述上料机构切断所述端子后,从所述上料机构取出端子并移送至所述纵向移送机构的相邻处,再进行纵向移送,由所述纵向移送机构从所述横向移送机构接取所述端子,之后纵向运动至所述端子交接机构的相邻处,再由所述端子交接机构接取所述端子,之后移送至所述旋转压着机构的压着工位,等待电线置于所述旋转压着机构压着工位的端子之内时,利用所述旋转压着机构将所述端子挤压扣合于所述电线上,所述旋转压着机构按照需求旋转若干工位,等待执行下一次压着任务。相比现有技术而言,本实用新型可同时装载多种规格的端子,较好地实现了对相应规格端子的灵活取用,不仅易于安装调试,而且有利于提高工作效率,同时该设备节省空间,应用成本也更低,较好地满足了应用需求。
技术特征:
1.一种多工位端子上料旋转压着设备,其特征在于,包括有机台,所述机台的后端设有多组供料机构,所述机台上设有多个上料机构、横向移送机构、纵向移送机构、端子交接机构和旋转压着机构,所述上料机构与所述供料机构一一对应且相邻设置,所述供料机构用于提供端子料带,所述上料机构用于从所述供料机构取出所述端子料带以及切断所述端子料带前端的端子,所述横向移送机构用于横向运动至指定位置的所述上料机构前侧,从所述上料机构取出端子并移送至所述纵向移送机构的相邻处,所述纵向移送机构用于从所述横向移送机构接取所述端子并纵向运动至所述端子交接机构的相邻处,所述端子交接机构用于从所述纵向移送机构接取所述端子并移送至所述旋转压着机构的压着工位,待电线置于所述端子之内时,借由所述旋转压着机构将所述端子挤压扣合于所述电线上。
2.如权利要求1所述的多工位端子上料旋转压着设备,其特征在于,所述供料机构包括有料卷和驱动辊,所述料卷内的所述端子料带在所述驱动辊带动下将端子料带与纸带分离。
3.如权利要求1所述的多工位端子上料旋转压着设备,其特征在于,所述横向移送机构包括有横向运动模组,所述横向运动模组的横向运动端设有能够在预设角度内摆动的换向机构,所述换向机构的运动端设有横向移送夹爪,所述横向移送夹爪用于从所述上料机构夹取端子。
4.如权利要求3所述的多工位端子上料旋转压着设备,其特征在于,所述换向机构的运动端固定有倒l形压板,所述倒l形压板的水平部向所述换向机构的顶部方向延伸,所述横向移送夹爪安装于所述倒l形压板的竖直部。
5.如权利要求4所述的多工位端子上料旋转压着设备,其特征在于,所述上料机构的切料运动端设有随动支臂,所述随动支臂的端部设有随动压头,当所述换向机构带动所述横向移送夹爪旋转运动至所述上料机构的相邻处并夹紧端子边缘时,所述上料机构执行切断动作,所述随动支臂跟随该切断动作压紧于所述倒l形压板的水平部。
6.如权利要求1所述的多工位端子上料旋转压着设备,其特征在于,所述纵向移送机构包括有纵向运动模组,所述纵向运动模组的纵向运动端设有向下延伸的纵向运动支臂,所述纵向运动支臂的下端设有纵向运动夹爪,所述纵向运动夹爪用于夹取所述端子。
7.如权利要求1所述的多工位端子上料旋转压着设备,其特征在于,所述端子交接机构包括有前后运动模组,所述前后运动模组的运动端设有升降运动模组,所述升降运动模组的运动端设有左右运动模组,所述左右运动模组的运动端设有用于夹取所述端子的端子交接夹爪。
8.如权利要求7所述的多工位端子上料旋转压着设备,其特征在于,所述端子交接机构包括与所述机台固定连接的底座,所述前后运动模组固定于所述底座上,所述前后运动模组的运动端设有立板,所述升降运动模组固定于所述立板上。
9.如权利要求7所述的多工位端子上料旋转压着设备,其特征在于,所述左右运动模组的运动端固定有交接支板,所述交接支板向所述纵向移送机构方向伸出,所述端子交接夹爪安装于所述交接支板上。
技术总结
本技术公开了一种多工位端子上料旋转压着设备,其中:上料机构与供料机构一一对应且相邻设置,供料机构用于提供端子料带,上料机构用于从供料机构取出端子料带以及切断端子料带前端的端子,横向移送机构用于横向运动至指定位置的上料机构前侧,从上料机构取出端子并移送至纵向移送机构的相邻处,纵向移送机构用于从横向移送机构接取端子并纵向运动至端子交接机构的相邻处,端子交接机构用于从纵向移送机构接取端子并移送至旋转压着机构的压着工位,待电线置于端子之内时,由旋转压着机构将端子挤压扣合于电线上。本技术可同时装载多种规格的端子,能实现对相应端子的灵活取用,节省空间和成本、易于安装调试、有利于提高工作效率。
技术研发人员:高东林
受保护的技术使用者:深圳市林全科技有限公司
技术研发日:20230414
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!