一种电动无人驾驶拖拉机继电器控制板
本技术涉及电动无人驾驶拖拉机和继电器控制板设计领域,并特别涉及一种电动无人驾驶拖拉机继电器控制板。
背景技术:
1、目前,国内农业机械领域内使用的多为柴油有人驾驶拖拉机,燃油拖拉机电气设备少,电流较小,控制逻辑简单,主要是灯光和喇叭,所以继电器控制板结构简单,功能单一。
2、传统继电器控制板结构简单,功能单一,无法实现复杂的逻辑控制,且不能承受大电流,而电动无人驾驶拖拉机传感器和电气设备多,电气化、智能化程度高。除此之外,传统的拖拉机灯光控制存在多路分支共用一路保险,一旦干路保险损坏,造成其它支路灯光无法正常运行的尴尬局面,且干路保险对支路过流保护精度差的缺点。所以传统继电器控制板不能满足电动无人驾驶拖拉机的使用要求,因此提供一种能够满足电动无人驾驶拖拉机要求的继电器控制板结构是非常有必要的。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的不足,提供一种电动无人驾驶拖拉继电器控制板结构,用紧凑的结构,较低的成本,满足整车电控系统对继电器控制板的要求,有效解决技术背景中的问题。
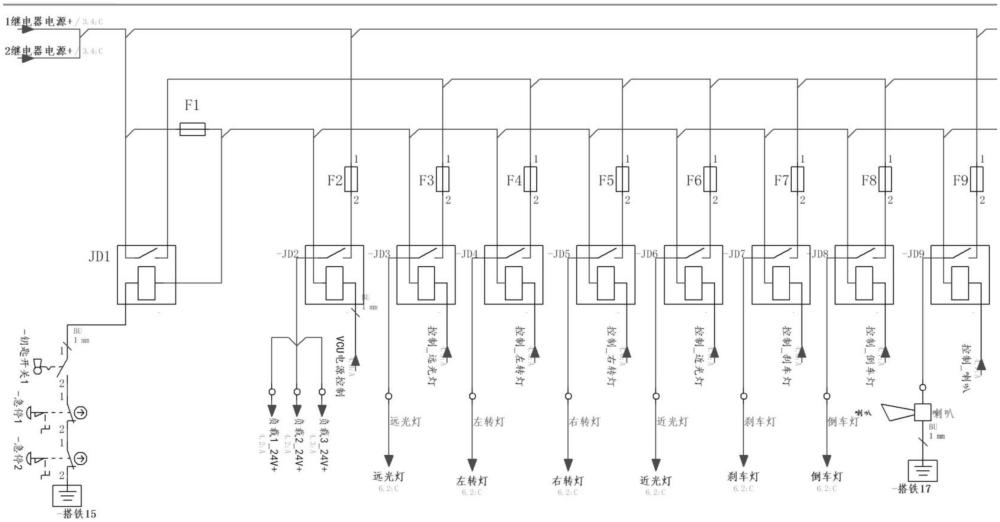
2、具体来说,本实用新型提出的电动无人驾驶拖拉机继电器控制板,包括:一个总控继电器和多个分控继电器,该总控继电器与所有该分控继电器的控制端相连,用于控制所有分控继电器的通断,且该分控继电器的控制端连接有单独控制电路;经过该分控继电器的负载端通过保险片为负载提供电源。
3、所述的电动无人驾驶拖拉机继电器控制板,其中该总控继电器内部线圈的正极与各个分控继电器线圈的正极电性连接,该总控继电器内部线圈的负极与各个分控继电器线圈的负极使用相同的电位参考点。
4、所述的电动无人驾驶拖拉机继电器控制板,其中该总控继电器和该分控继电器设有用于插拔线圈的结构。
5、所述的电动无人驾驶拖拉机继电器控制板,其中设有用于插拔该保险片的插座。
6、所述的电动无人驾驶拖拉机继电器控制板,其中该继电器控制板内包括两路电源,其中一路电源通过该总控继电器的通断控制所有该分控继电器的线圈正极电源,另一路电源通过该保险片将电源直接分配到该负载。
7、由以上方案可知,本实用新型的优点在于:
8、与现有技术相比,本实用新型的有益效果是:本电动无人驾驶拖拉机继电器控制板具有控制集中,节省电器件的排布空间的优点;还具有内部总负载电源分为两路,一路连接所有内部继电器的正极,另一路通过继电器jd1将电源分配到各个继电器的常开端。这样以来的话,不仅使整个继电器板内部只有正极线路互联,所有线圈负极均为控制端,减少内部线路布局复杂的缺点;而且还具备了电源隔离作用,使其所有继电器的线圈电源输入与触点电源输入互不影响,相互独立的好处;除此之外还具有控制简单,两路分流,抗大电流的优点。
9、本电动无人驾驶拖拉机继电器控制板进线分成两路。一路通过保险后连接到各个继电器的线圈正极点位点;分成两路,可承受更大电流;总控继电器可以控制所有支路,可以满足整车逻辑性控制要求;整个继电器板只有正极,所有线圈均为负极控制,减少线路,节约成本。
技术特征:
1.一种电动无人驾驶拖拉机继电器控制板,其特征在于,包括:一个总控继电器和多个分控继电器,该总控继电器与所有该分控继电器的控制端相连,用于控制所有分控继电器的通断,且该分控继电器的控制端连接有单独控制电路;经过该分控继电器的负载端通过保险片为该电动无人驾驶拖拉机的负载提供电源。
2.如权利要求1所述的电动无人驾驶拖拉机继电器控制板,其特征在于,该总控继电器内部线圈的正极与各个分控继电器线圈的正极电性连接,该总控继电器内部线圈的负极与各个分控继电器线圈的负极使用相同的电位参考点。
3.如权利要求1所述的电动无人驾驶拖拉机继电器控制板,其特征在于,该总控继电器和该分控继电器设有用于插拔线圈的结构。
4.如权利要求1所述的电动无人驾驶拖拉机继电器控制板,其特征在于,设有用于插拔该保险片的插座。
5.如权利要求1所述的电动无人驾驶拖拉机继电器控制板,其特征在于,该继电器控制板内包括两路电源,其中一路电源通过该总控继电器的通断控制所有该分控继电器的线圈正极电源,另一路电源通过该保险片将电源直接分配到该负载。
技术总结
本技术提出一种电动无人驾驶拖拉机继电器控制板,包括:一个总控继电器和多个分控继电器,该总控继电器与所有该分控继电器的控制端相连,用于控制所有分控继电器的通断,且该分控继电器的控制端连接有单独控制电路;经过该分控继电器的负载端通过保险片为负载提供电源。本技术使整个继电器板内部只有正极线路互联,所有线圈负极均为控制端,减少内部线路布局复杂的缺点;而且还具备了电源隔离作用,使其所有继电器的线圈电源输入与触点电源输入互不影响,相互独立的好处;除此之外还具有控制简单,两路分流,抗大电流的优点。
技术研发人员:王鹏,龙隆,张玉成,李蕾
受保护的技术使用者:中国科学院计算技术研究所
技术研发日:20230907
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!