一种电感绕组引脚的切脚缠脚一体机的制作方法
本技术涉及电感加工,特别是涉及一种电感绕组引脚的切脚缠脚一体机。
背景技术:
1、在电感加工过程中,需要将电感绕组引脚切断并将其缠绕于电感引脚上,相关技术一般通过人工操作或者自动化设备实现这一过程。然而,电感绕组引脚的切断及缠绕操作通过人工操作会导致电感加工效率较低,通过自动化设备操作往往无法保证电感绕组引脚的缠绕质量。
技术实现思路
1、基于此,有必要针对电感绕组引脚的加工难题,提供一种电感绕组引脚的切脚缠脚一体机。
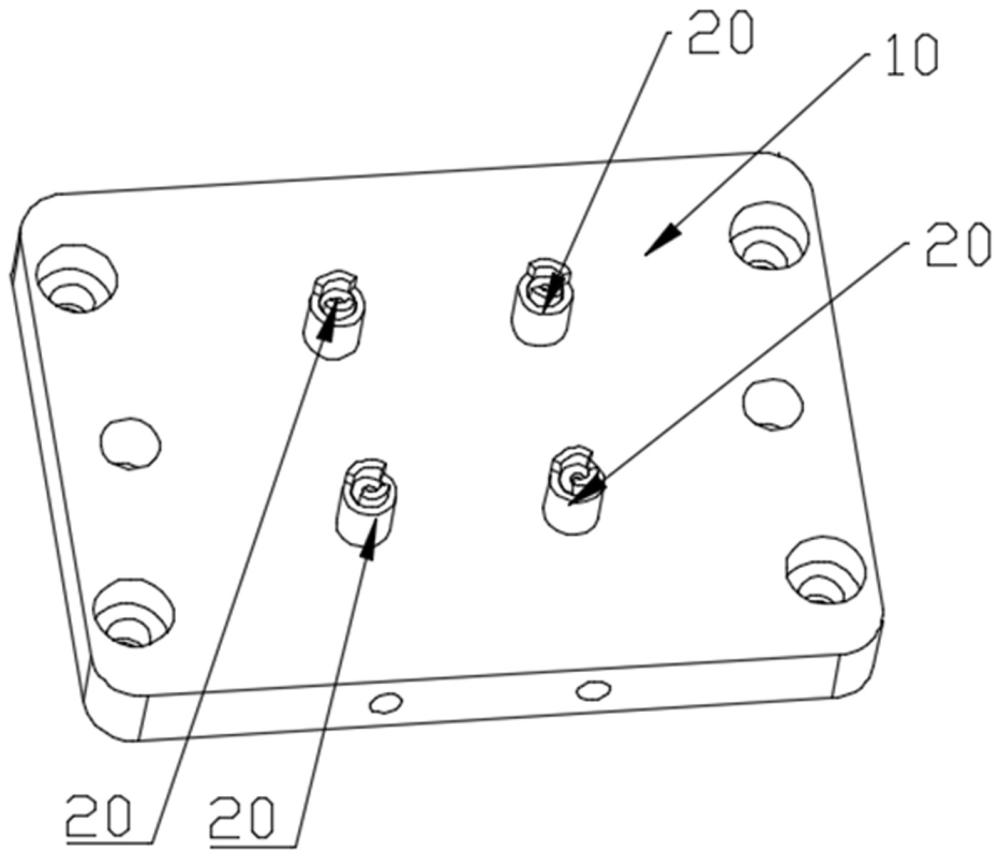
2、一种电感绕组引脚的切脚缠脚一体机,所述切脚缠脚一体机包括工作台及安装于所述工作台上的至少一个旋切刀,所述旋切刀包括固定件及运动件,所述固定件套设于所述运动件的外侧,所述固定件的一端设置有固定旋切部,所述运动件的一端设置有运动旋切部,所述运动件的中轴线上开设有固定电感引脚的卡槽,所述运动旋切部与所述电感引脚的横向距离小于所述电感绕组引脚的内径。
3、上述的电感绕组引脚的切脚缠脚一体机,当电感处于待加工状态时,电感引脚插入运动件的卡槽中,固定旋切部可以对电感绕组引脚进行限位;通过运动件的旋转带动运动旋切部运动,运动旋切部在运动过程中与电感绕组引脚接触,由于运动旋切部与电感引脚的横向距离小于电感绕组引脚的内径,随着运动旋切部的运动,电感绕组引脚被切断并紧密缠绕在电感引脚上,实现了电感绕组引脚的切脚操作和缠绕操作的同步进行,提高了电感绕组引脚的加工效率及加工质量。
4、在其中一个实施例中,当所述运动旋切部运动至与所述固定旋切部接触时,所述运动旋切部的外弧面与所述固定旋切部的内弧面滑动连接。
5、在其中一个实施例中,所述运动旋切部的外弧面的周向弧长等于所述固定旋切部的内弧面的周向弧长。
6、在其中一个实施例中,安装于所述工作台上的旋切刀数量为4个,分别用于对共模电感的4个电感绕组引脚执行切脚缠脚操作。
7、在其中一个实施例中,所述运动件通过齿轮传动与步进电机的旋转轴连接。
8、在其中一个实施例中,所述运动件的另一端设置有感应块及槽型光电传感器,所述感应块与所述运动件固定连接,所述槽型光电传感器用于在所述感应块运动时产生开关信号。
技术特征:
1.一种电感绕组引脚的切脚缠脚一体机,其特征在于,所述切脚缠脚一体机包括工作台及安装于所述工作台上的至少一个旋切刀,所述旋切刀包括固定件及运动件,所述固定件套设于所述运动件的外侧,所述固定件的一端设置有固定旋切部,所述运动件的一端设置有运动旋切部,所述运动件的中轴线上开设有固定电感引脚的卡槽,所述运动旋切部与所述电感引脚的横向距离小于所述电感绕组引脚的内径。
2.根据权利要求1所述的电感绕组引脚的切脚缠脚一体机,其特征在于,当所述运动旋切部运动至与所述固定旋切部接触时,所述运动旋切部的外弧面与所述固定旋切部的内弧面滑动连接。
3.根据权利要求1或2所述的电感绕组引脚的切脚缠脚一体机,其特征在于,所述运动旋切部的外弧面的周向弧长等于所述固定旋切部的内弧面的周向弧长。
4.根据权利要求3所述的电感绕组引脚的切脚缠脚一体机,其特征在于,安装于所述工作台上的旋切刀数量为4个,分别用于对共模电感的4个电感绕组引脚执行切脚缠脚操作。
5.根据权利要求4所述的电感绕组引脚的切脚缠脚一体机,其特征在于,所述运动件通过齿轮传动与步进电机的旋转轴连接。
6.根据权利要求5所述的电感绕组引脚的切脚缠脚一体机,其特征在于,所述运动件的另一端设置有感应块及槽型光电传感器,所述感应块与所述运动件固定连接,所述槽型光电传感器用于在所述感应块运动时产生开关信号。
技术总结
本技术涉及一种电感绕组引脚的切脚缠脚一体机。该电感绕组引脚的切脚缠脚一体机包括工作台及安装于所述工作台上的至少一个旋切刀,所述旋切刀包括固定件及运动件,所述固定件套设于所述运动件的外侧,所述固定件的一端设置有固定旋切部,所述运动件的一端设置有运动旋切部,所述运动件的中轴线上开设有固定电感引脚的卡槽,所述运动旋切部与所述电感引脚的横向距离小于所述电感绕组引脚的内径。通过本技术技术方案,可以实现将电感绕组引脚的切脚操作和缠脚操作同步进行,提高了电感的加工效率及加工质量。
技术研发人员:汪江波,李昌杰
受保护的技术使用者:惠州江泰科技有限公司
技术研发日:20230914
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!