晶圆搬运机器人的制作方法
本发明涉及晶圆传输设备,具体为晶圆搬运机器人。
背景技术:
1、在半导体制造时,晶圆作为制备芯片的基本载体,需要经过多个工艺处理,在进行工艺处理时,一般需将载体(晶圆盒)内的晶圆移载至能上下间隔保持多个晶圆的晶舟内,然后直接将晶舟搬入至各工艺腔内,以对多个晶圆同时进行工艺处理;为了实现晶圆盒与晶舟之间的晶圆流转,一般会在两者之间设置搬运机构,但现有的搬运机构中,各移动件间配合度较低,影响晶圆传输效率和传输精度;
2、鉴于上述情况,有必要对现有的晶圆搬运机器人加以改进,使其能够适应现在对晶圆搬运使用的需要。
技术实现思路
1、本发明的目的是为了解决上述问题,设计了晶圆搬运机器人。
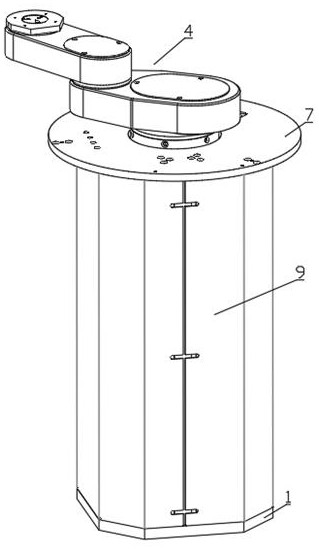
2、实现上述目的本发明的技术方案为,晶圆搬运机器人,包括底板、设置于底板上的丝杆机构、对称设置于底板上方左右两侧的线性导轨、设置于线性导轨上的滑块、与滑块连接的主转筒、与主转筒连接的摆臂机构,所述底板上有两个铝型材立柱,所述主转筒上方设有360°任意x、y方向安装板,所述安装板上设有穿设孔供主转筒往复位移。
3、对本技术方案的进一步补充,所述丝杆机构包括步进电机、与步进电机连接的丝杆、与丝杆连接的下固定座、与丝杆连接的螺母,所述步进电机固定安装于底板上,所述下固定座固定安装于底板上,所述螺母与主转筒连接,所述丝杆与下固定板通过轴承连接,所述丝杆的上端呈悬空设置且其设置于安装板下方。
4、对本技术方案的进一步补充,所述摆臂机构包括驱动电机、与驱动电机连接的电机轮、与电机轮通过同步带连接的传动轮、与传动轮连接的第一连接臂机构、与第一连接臂机构通过皮带连接的第二连接臂机构,所述驱动电机固定安装于主转筒内。
5、对本技术方案的进一步补充,所述第一连接臂机构包括与传动轮连接的大臂穿心轴、与大臂穿心轴连接的大臂同步轮、设置于大臂同步轮上的限位板、设置于大臂同步轮外侧的大臂s轮、与大臂s轮通过皮带连接的大臂连接轮,所述大臂穿心轴穿过限位板的上下表面且与其转动连接。
6、对本技术方案的进一步补充,所述大臂同步轮的下方且位于电机轮、传动轮的上方设有上端盖,所述大臂穿心轴设置于上端盖内且可转动安装于其内,所述大臂 s轮、大臂连接轮外侧还设有大臂安装壳,所述大臂安装壳固定安装于限位板上方。
7、对本技术方案的进一步补充,所述大臂s轮与大臂连接轮的齿数比为2:1。
8、对本技术方案的进一步补充,所述第二连接臂机构包括小臂穿心轴、与小臂穿心轴连接的小臂同步轮、设置于小臂同步轮一侧的连接板、设置于小臂同步轮上方的小臂s轮、与小臂s轮通过皮带连接的小臂连接轮、设置于小臂连接轮上方的晶圆托盘,所述小臂穿心轴的下端设置于大臂连接轮内侧且与其连接,所述小臂同步轮套设于小臂穿心轴外侧,所述小臂s轮套设于小臂穿心轴的外侧且与其连接,所述小臂s轮与小臂连接轮通过同步带连接,所述晶圆托盘与小臂连接轮固定连接,所述连接板的一端与小臂同步轮固定连接。
9、对本技术方案的进一步补充,所述小臂s轮、小臂连接轮的外侧且位于连接板的上方还设有小臂安装壳,所述小臂安装壳的下端与连接板固定连接。
10、对本技术方案的进一步补充,所述小臂s轮与小臂连接轮的齿数比为1:2。
11、对本技术方案的进一步补充,所述主转筒下方还设有转筒驱动机构。
12、其有益效果在于,在摆臂机构完全伸展的范围内,能够达到设备中心360度范围内的任意位置;并且本技术方案中丝杆机构采用单端固定,另一端悬空的方式,使机械装配的同轴度要求,更便于达到;本技术方案传动部分采用同步轮同步带方式传动多数部位,位置准确,搬运方便,占地空间小。
技术特征:
1.晶圆搬运机器人,其特征在于,包括底板(1)、设置于底板(1)上的丝杆机构(2)、对称设置于底板(1)上方左右两侧的线性导轨(5)、设置于线性导轨上的滑块(12)、与滑块(12)连接的主转筒(3)、与主转筒(3)连接的摆臂机构(4),所述底板(1)上有两个铝型材立柱(6),所述主转筒上方设有360°任意x、y方向安装板(7),所述安装板(7)上设有穿设孔供主转筒(3)往复位移。
2.根据权利要求1所述的晶圆搬运机器人,其特征在于:---所述丝杆机构(2)包括步进电机(21)、与步进电机(21)连接的丝杆(22)、与丝杆(22)连接的下固定座(23)、与丝杆(22)连接的螺母,所述步进电机(21)固定安装于底板(1)上,所述下固定座(23)固定安装于底板(1)上,所述螺母与主转筒(3)连接,所述丝杆(22)与下固定板通过轴承连接,所述丝杆(22)的上端呈悬空设置且其设置于安装板(7)下方。
3.根据权利要求2所述的晶圆搬运机器人,其特征在于,所述摆臂机构(4)包括驱动电机(41)、与驱动电机(41)连接的电机轮(42)、与电机轮(42)通过同步带连接的传动轮(43)、与传动轮(43)连接的第一连接臂机构(44)、与第一连接臂机构(44)通过皮带连接的第二连接臂机构(45),所述驱动电机(41)固定安装于主转筒(3)内。
4.根据权利要求3所述的晶圆搬运机器人,其特征在于,所述第一连接臂机构(44)包括与传动轮(43)连接的大臂穿心轴(441)、与大臂穿心轴(441)连接的大臂同步轮(442)、设置于大臂同步轮(442)上的限位板(443)、设置于大臂同步轮(442)外侧的大臂s轮(444)、与大臂s轮(444)通过皮带连接的大臂连接轮(445),所述大臂穿心轴(441)穿过限位板(443)的上下表面且与其转动连接。
5.根据权利要求4所述的晶圆搬运机器人,其特征在于,所述大臂同步轮(442)的下方且位于电机轮(42)、传动轮(43)的上方设有上端盖(446),所述大臂穿心轴(441)设置于上端盖(446)内且可转动安装于其内,所述大臂 s轮、大臂连接轮(445)外侧还设有大臂安装壳(8),所述大臂安装壳(8)固定安装于限位板(443)上方。
6.根据权利要求4所述的晶圆搬运机器人,其特征在于,所述大臂s轮(444)与大臂连接轮(445)的齿数比为2:1。
7.根据权利要求6所述的晶圆搬运机器人,其特征在于,所述第二连接臂机构(45)包括小臂穿心轴(451)、与小臂穿心轴(451)连接的小臂同步轮(452)、设置于小臂同步轮(452)一侧的连接板(453)、设置于小臂同步轮(452)上方的小臂s轮(454)、与小臂s轮(454)通过皮带连接的小臂连接轮(455)、设置于小臂连接轮(455)上方的晶圆托盘(456),所述小臂穿心轴(451)的下端设置于大臂连接轮(445)内侧且与其连接,所述小臂同步轮(452)套设于小臂穿心轴(451)外侧且与其连接,所述小臂s轮(454)套设于小臂穿心轴(451)的外侧且与其连接,所述小臂s轮(454)与小臂连接轮(455)通过同步带连接,所述晶圆托盘(456)与小臂连接轮(455)固定连接,所述连接板(453)的一端与小臂同步轮(452)固定连接。
8.根据权利要求7所述的晶圆搬运机器人,其特征在于,所述小臂s轮(454)、小臂连接轮(455)的外侧且位于连接板(453)的上方还设有小臂安装壳(10),所述小臂安装壳(10)的下端与连接板(453)固定连接。
9.根据权利要求7所述的晶圆搬运机器人,其特征在于,所述小臂s轮(454)与小臂连接轮(455)的齿数比为1:2。
10.根据权利要求9所述的晶圆搬运机器人,其特征在于,所述主转筒(3)下方还设有转筒驱动机构(11)。
技术总结
本发明公开了晶圆搬运机器人,包括底板、设置于底板上的丝杆机构、对称设置于底板上方左右两侧的线性导轨、设置于线性导轨上的滑块、与滑块连接的主转筒、与主转筒连接的摆臂机构,所述底板上有两个铝型材立柱,所述主转筒上方设有360°任意X、Y方向安装板,所述安装板上设有穿设孔供主转筒往复位移。本发明的有益效果是,在摆臂机构完全伸展的范围内,能够达到设备中心360度范围内的任意位置;并且本技术方案中丝杆机构采用单端固定,另一端悬空的方式,使机械装配的同轴度要求,更便于达到;本技术方案传动部分采用同步轮同步带方式传动多数部位,位置准确。
技术研发人员:姚志峰,许炳维,赵磊,李宝军,常洪亮
受保护的技术使用者:苏州斯科勒自动化设备有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!