电动机驱动装置以及冷冻循环应用设备的制作方法
[0001]
本发明涉及电动机驱动装置以及具备该电动机驱动装置的冷冻循环应用设备。
背景技术:
[0002]
以往,提出通过在与绕组并联连接的预备负载流过电流的同时在星形接线与三角形接线之间切换利用逆变器驱动的电动机的状态,避免瞬间地流过大的电流(例如专利文献1)。
[0003]
现有技术文献
[0004]
专利文献
[0005]
专利文献1:日本特开2016-86587号公报
技术实现要素:
[0006]
在专利文献1记载的技术中,需要在负载大且流过大电流的条件下增大预备负载的电力容量,存在设备的大型化等课题。
[0007]
本发明是鉴于上述完成的,其目的在于提供能够避免设备的大型化、而且能够在电动机的旋转过程中切换绕组的接线的、可靠性高的电动机驱动装置。
[0008]
本发明所涉及的电动机驱动装置具有:
[0009]
直流电源电路,对直流母线施加电压值可变的直流电压;
[0010]
逆变器,接受所述直流母线的直流电压,对电动机施加频率及电压值可变的交流电压;以及
[0011]
接线切换装置,切换所述电动机的绕组的接线,
[0012]
从通过所述接线切换装置选择第1接线、所述直流电源电路的输出电压是第1电压值、且所述电动机的旋转速度是第1速度值的第1状态转移到所述直流电源电路的输出电压高于所述第1电压值、且所述电动机的旋转速度高于所述第1速度值、且在所述电动机流过的电流是预先决定的阈值以下的第2状态,
[0013]
在该第2状态下,所述接线切换装置进行从选择了所述第1接线的状态向选择了第2接线的状态的切换。
[0014]
根据本发明,能够得到能够避免设备的大型化、而且能够在电动机的旋转过程中切换绕组的接线的、可靠性高的电动机驱动装置。
附图说明
[0015]
图1是示出空气调节机的冷冻循环的一个例子的概略图。
[0016]
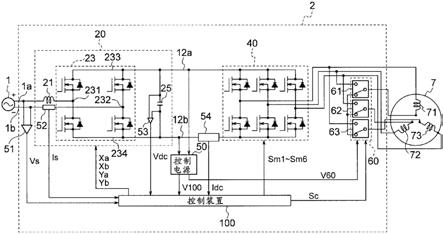
图2是示出本发明的实施方式1的电动机驱动装置的图。
[0017]
图3是示出在实施方式1中使用的直流电源电路的结构例的图。
[0018]
图4是示出在实施方式1中使用的逆变器的结构例的图。
[0019]
图5是详细地示出图2所示的电动机的绕组和接线切换装置的布线图。
[0020]
图6是示出图5所示的接线切换装置的切换器的详细的布线图。
[0021]
图7的(a)以及(b)是概念性地示出电动机的不同的接线中的绕组的状态的图。
[0022]
图8是示出在实施方式1中使用的控制装置的结构例的图。
[0023]
图9的(a)是示出电源电压为正极性时的针对平滑电容器的充电路径的图,(b)是示出电源电压为负极性时的针对平滑电容器的充电路径的图。
[0024]
图10的(a)是示出电源电压为正极性时的经由电抗器的交流电源的短路路径的图,(b)是示出电源电压为负极性时的经由电抗器的交流电源的短路路径的图。
[0025]
图11是示出图8所示的控制装置的直流电源控制部的一个例子的功能框图。
[0026]
图12的(a)~(c)是示出图11所示的直流电源控制部的电源电压相位运算部的动作例的图。
[0027]
图13是示出图8所示的控制装置的逆变器控制部的一个例子的功能框图。
[0028]
图14是示出图13所示的逆变器控制部的电压指令值运算部的结构例的功能框图。
[0029]
图15的(a)~(e)是示出进行接线切换时的控制序列的波形图。
[0030]
图16是示出逆变器的调制系数和输出电压的关系的图。
[0031]
图17是示出在本发明的实施方式2中使用的直流电源电路的结构例的布线图。
[0032]
图18是示出在实施方式2中使用的控制装置的直流电源控制部的一个例子的功能框图。
[0033]
图19是示出本发明的实施方式3中的电动机的绕组和接线切换装置的布线图。
[0034]
图20是示出本发明的实施方式4中的电动机的绕组和接线切换装置的布线图。
[0035]
(符号说明)
[0036]
1:交流电源;2:电动机驱动装置;7:电动机;20、20b:直流电源电路;21:电抗器;23:转换器;25:平滑电容器;26:整流电路;27:升压斩波器电路;40:逆变器;50:控制电源生成电路;51:电源电压检测器;52:电源电流检测器;53:母线电压检测器;54:母线电流检测器;60:接线切换装置;100:控制装置;110:运转指令部;120、120b:直流电源控制部;160:逆变器控制部;161:电流恢复部;162:2相3相变换部;163:γ轴电流指令值运算部;165:电压指令值运算部;166:2相3相变换部;167:pwm信号生成部;202:母线电压控制部;204:电源电压相位运算部;206:电源电流指令值运算部;208:电源电流控制部;210:导通占空(on duty)运算部;212:载波生成部;214:pwm信号生成部;900:冷冻循环;902:四通阀;904:压缩机;906:室内热交换器;908:膨胀阀;910:室外热交换器。
具体实施方式
[0037]
以下,参照附图,说明本发明的实施方式所涉及的电动机驱动装置以及具备该电动机驱动装置的冷冻循环应用设备。此外,本发明不限定于以下所示的实施方式。
[0038]
冷冻循环应用设备的一个例子是空气调节机,以下的实施方式是将本发明应用于驱动空气调节机的压缩机的电动机的驱动装置的例子。
[0039]
最初,参照图1,说明空气调节机的一个例子中的冷冻循环。
[0040]
图1的冷冻循环900能够通过四通阀902的切换动作进行制热运转或者制冷运转。
[0041]
在制热运转时,如实线箭头所示,制冷剂通过压缩机904被加压送出,经由四通阀902、室内热交换器906、膨胀阀908、室外热交换器910以及四通阀902返回到压缩机904。
[0042]
在制冷运转时,如虚线箭头所示,制冷剂通过压缩机904被加压送出,经由四通阀902、室外热交换器910、膨胀阀908、室内热交换器906以及四通阀902返回到压缩机904。
[0043]
在制热运转时,室内热交换器906作为凝结器发挥作用进行热释放,室外热交换器910作为蒸发器发挥作用进行热吸收。在制冷运转时,室外热交换器910作为凝结器发挥作用进行热释放,室内热交换器906作为蒸发器发挥作用进行热吸收。膨胀阀908使制冷剂减压而膨胀。
[0044]
压缩机904通过可变速控制的电动机7驱动。
[0045]
实施方式1.
[0046]
图2是示出本发明的实施方式1的电动机驱动装置2的概略布线图。
[0047]
图示的电动机驱动装置2是用于驱动电动机7的装置,具有直流电源电路20、逆变器40、控制电源生成电路50、电源电压检测器51、电源电流检测器52、母线电压检测器53、母线电流检测器54、接线切换装置60以及控制装置100。
[0048]
直流电源电路20接受从交流电源1输出的交流电压,输出电压值可变的直流电压。
[0049]
以下,有时将从交流电源1输出的电压简称为“电源电压”。
[0050]
直流电源电路20如图3所示,具有电抗器21、桥型pwm转换器23以及平滑电容器25。
[0051]
pwm转换器23具有对施加到第1以及第2交流端子231、232的交流电压进行整流的功能和对施加到第1以及第2交流端子231、232的交流电压进行升压的功能,从第1以及第2直流端子233、234输出整流并升压后的直流电压。第1直流端子233还被称为正侧直流端子,第2直流端子234还被称为负侧直流端子。
[0052]
第1交流端子231经由电抗器21与交流电源1的第1端子1a连接,第2交流端子232与交流电源1的第2端子1b连接。
[0053]
pwm转换器23具有转换器主电路23a和驱动电路23b。
[0054]
转换器主电路23a具备第1分支23c和第2分支23d。
[0055]
第1分支23c以及第2分支23d在直流端子233、234之间相互并联地连接。
[0056]
第1分支23c具有相互串联地连接的上支路311和下支路312。第2分支23d具有相互串联地连接的上支路313和下支路314。上支路311和下支路312的连接点构成交流端子231。上支路313和下支路314的连接点构成交流端子232。
[0057]
上支路311具有相互反并联连接的开关元件331和二极管341。下支路312具有相互反并联连接的开关元件332和二极管342。上支路313具有相互反并联连接的开关元件333和二极管343。下支路314具有相互反并联连接的开关元件334和二极管344。
[0058]
开关元件和二极管反并联连接是指,以使在该开关元件是导通时在该开关元件流过的电流的朝向和在该二极管流过的电流的朝向相反的方式并联地连接。
[0059]
开关元件331~334各自由例如mosfet构成。在该情况下,也可以将mosfet自身在内部具有的寄生二极管用作上述二极管(341~344)。
[0060]
驱动电路23b根据pwm信号xa、xb、ya、yb,生成驱动信号sd1~sd4,通过驱动信号sd1~sd4控制开关元件331~334的导通、截止,由此,从转换器主电路23a输出电压值可变的直流电压vdc。
[0061]
驱动信号sd1是用于仅在通过pwm信号xb表示的、应成为导通的期间使第1开关元件331成为导通的信号。
[0062]
驱动信号sd2是用于仅在通过pwm信号xa表示的、应成为导通的期间使第2开关元件332成为导通的信号。
[0063]
驱动信号sd3是用于仅在通过pwm信号ya表示的、应成为导通的期间使第3开关元件333成为导通的信号。
[0064]
驱动信号sd4是用于仅在通过pwm信号yb表示的、应成为导通的期间使第4开关元件334成为导通的信号。
[0065]
平滑电容器25对pwm转换器23的输出电压进行平滑化。
[0066]
平滑电容器25的一方的电极与pwm转换器23的第1直流端子233以及高电位侧(正侧)的直流母线12a连接。
[0067]
平滑电容器25的另一方的电极与pwm转换器23的第2直流端子234以及低电位侧(负侧)的直流母线12b连接。
[0068]
用平滑电容器25平滑并施加到直流母线12a、12b之间的电压是直流电源电路20的输出电压。将该输出电压称为“母线电压”。
[0069]
逆变器40如图4所示,具有逆变器主电路410和驱动电路450,逆变器主电路410的输入端子与直流母线12a、12b连接。
[0070]
逆变器40通过控制装置100控制,逆变器主电路410的6个支路的开关元件411~416进行导通、截止动作,生成频率可变且电压值可变的3相交流电流,供给到电动机7。对开关元件411~416反并联连接回流用的整流元件421~426。
[0071]
开关元件411~416各自由例如mosfet构成。在该情况下,也可以将mosfet自身在内部具有的寄生二极管用作上述二极管(421~426)。
[0072]
电动机7是3相永久磁铁同步电动机,定子绕组的端部被抽出到电动机7的外部,既能够使绕组成为星形接线(y接线)、也能够成为三角形接线(δ接线)。接线的选择是通过接线切换装置60进行的。
[0073]
图5更详细地示出电动机7的定子绕组以及接线切换装置60。
[0074]
如图所示,电动机7的、由u相、v相、w相构成的3个相的绕组71、72、73的第1端部71a、72a、73a分别与外部端子71c、72c、73c连接,u相、v相、w相的绕组71、72、73的第2端部71b、72b、73b分别与外部端子71d、72d、73d连接,能够与电动机7的外部连接。对外部端子71c、72c、73c连接逆变器40的u相、v相、w相的输出线431、432、433。
[0075]
接线切换装置60在图示的例子中,由切换器61、62、63构成。在切换器61、62、63分别流过在绕组71、72、73流过的电流。切换器61、62、63分别切换在绕组71、72、73流过的电流的路径。作为切换器61、62、63,使用接点电磁地开闭的电磁接触器。这样的电磁接触器包括被称为继电器、接触器等的例子,例如如图6所示构成,在励磁线圈611、621、631流过电流时和未流过电流时,取不同的连接状态。
[0076]
励磁线圈611、621、631以经由半导体开关604接受后述切换电源电压v60的方式连接。半导体开关604的开闭通过从控制装置100输出的后述接线选择信号sc控制。例如,在接线选择信号sc是第1值(例如低)时,半导体开关604成为截止,在接线选择信号sc是第2值(例如高)时,半导体开关604成为导通。也可以构成为在从具有充分的电流容量的电路输出接线选择信号sc的情况下,使基于信号sc的电流直接流入到励磁线圈611、621、631。在该情况下,半导体开关604变得不需要。
[0077]
切换器61的公共接点61c经由引线61e与端子71d连接,常闭接点61b与中性点节点64连接,常开接点61a与逆变器40的v相的输出线432连接。
[0078]
切换器62的公共接点62c经由引线62e与端子72d连接,常闭接点62b与中性点节点64连接,常开接点62a与逆变器40的w相的输出线433连接。
[0079]
切换器63的公共接点63c经由引线63e与端子73d连接,常闭接点63b与中性点节点64连接,常开接点63a与逆变器40的u相的输出线431连接。
[0080]
在励磁线圈611、621、631未流过电流时,切换器61、62、63如图所示处于切换到常闭接点侧的状态、即公共接点61c、62c、63c与常闭接点61b、62b、63b连接的状态。在该状态下,绕组71、72、73的端部71b、72b、73b经由切换器61、62、63在中性点节点64处相互连接,因此电动机7处于y接线的状态。
[0081]
在励磁线圈611、621、631流过电流时,切换器61、62、63与图示相反地处于切换到常开接点侧的状态、即公共接点61c、62c、63c与常开接点61a、62a、63a连接的状态。在该状态下,绕组71、72、73的端部71b、72b、73b分别经由切换器61、62、63与绕组72、73、71的端部72a、73a、71a连接,因此电动机7处于δ接线的状态。
[0082]
根据以上,在接线选择信号sc是第1值、例如低时,电动机7成为y接线的状态,在接线选择信号sc是第2值、例如高时,电动机7成为δ接线的状态。
[0083]
在此,以下,使用图7的(a)以及(b),说明作为电动机7使用能够切换到y接线以及δ接线中的任意接线的例子的优点。
[0084]
图7的(a)概念性地示出设为y接线时的定子绕组的连接状态,图7的(b)概念性地示出设为δ接线时的定子绕组的连接状态。
[0085]
在将y接线时的线间电压设为v
y
、将流入的电流设为i
y
、将δ接线时的线间电压设为v
δ
、将流入的电流设为i
δ
、设为施加到各相的绕组的电压相互相等时,存在如下的关系。
[0086][0087]
此时,存在如下的关系。
[0088][0089]
在y接线时的电压v
y
以及电流i
y
和δ接线时的电压v
δ
以及电流i
δ
具有式(1)以及(2)的关系时,在y接线时和δ接线时供给到电动机的电力相互相等。
[0090]
即,在供给到电动机的电力相互相等时,在δ接线中,电流更大,驱动所需的电压更低。
[0091]
考虑利用以上的性质,根据负载条件等选择接线。例如,考虑在低负载时,在y接线下低速运转,在高负载时,在δ接线下高速运转。由此,能够提高低负载时的效率,并且还能够实现高负载时的高输出化。
[0092]
以下,关于该点,更详细叙述驱动空调机的压缩机的电动机的情况。
[0093]
作为空调机的压缩机驱动用的电动机7,为了应对节能化的要求,广泛使用在转子中使用永久磁铁的同步电动机。另外,在近年来的空气调节机中,在室温和设定温度的差大时,通过使电动机7高速旋转而迅速接近设定温度,在室温接近设定温度时,使电动机7低速旋转而维持室温,在这样的情况下,低速运转的时间所占的比值大。
[0094]
在使用同步电动机的情况下,在旋转速度提高时,反电动势增加,驱动所需的电压
值增加。关于该反电动势,如上所述,y接线比δ接线更大。
[0095]
为了抑制高速中的反电动势,考虑减小永久磁铁的磁力或者减少定子绕组的匝数。但是,由此,用于得到同一输出转矩的电流增加,所以在电动机7以及逆变器40流过的电流增加,效率降低。
[0096]
因此,考虑根据旋转速度切换接线。例如,在需要高速下的运转的情况下,设为δ接线。由此,能够将驱动所需的电压(相比于y接线)设为因此,既无需减少绕组的匝数、并且也无需使用弱磁通控制。
[0097]
另一方面,在低速旋转中,通过设为y接线,相比于δ接线,能够将电流值设为进而,能够以适合于y接线且低速下的驱动的方式设计绕组,相比于在速度范围的全域中使用y接线的情况,能够降低电流值。其结果,能够降低逆变器40的损耗,能够提高效率。
[0098]
如以上说明,对根据负载条件切换接线有意义,设置接线切换装置的原因在于,能够进行这样的切换。
[0099]
控制电源生成电路50接受电容器25的两个电极之间的电压、即母线电压vdc并降压,生成控制电源电压v100以及切换电源电压v60,将控制电源电压v100供给到控制装置100,并且将切换电源电压v60供给到接线切换装置60。
[0100]
电源电压检测器51连接于交流电源1的端子1a、1b相互之间。电源电压检测器51检测电源电压vs并输出给控制装置100。
[0101]
电源电流检测器52配置于交流电源1与pwm转换器23之间。电源电流检测器52例如包括插入到连结交流电源1的端子1b和交流端子232的线的分流电阻。电源电流检测器52检测在交流电源1与pwm转换器23之间流过的电源电流is,输出给控制装置100。
[0102]
母线电压检测器53在平滑电容器25的2个电极相互之间连接,因此在母线12a、12b相互之间连接。母线电压检测器53检测母线电压vdc,输出给控制装置100。
[0103]
母线电流检测器54包括插入到直流母线12b的分流电阻。母线电流检测器54检测母线电流、即逆变器40的输入电流idc,输出到控制装置100。
[0104]
控制装置100控制直流电源电路20、逆变器40以及接线切换装置60。
[0105]
控制装置100控制直流电源电路20,使其输出电压变化。
[0106]
另外,控制装置100控制逆变器40,使其输出电压的频率以及电压值变化。
[0107]
进而,控制装置100控制接线切换装置60,进行电动机7的接线的选择。
[0108]
控制装置100通过微型处理器实现。微型处理器也可以是被称为cpu(central processing unit,中央处理单元)、微型计算机或者dsp(digital signal processor,数字信号处理器)的处理器或者处理装置。
[0109]
控制装置100例如如图8所示,具有运转指令部110、直流电源控制部120以及逆变器控制部160。
[0110]
运转指令部110输出母线电压指令值vdc
*
、频率指令值ω
*
、零选择信号sz以及上述接线选择信号sc。母线电压指令值vdc
*
被供给到直流电源控制部120,频率指令值ω
*
以及零选择信号sz被供给到逆变器控制部160,接线选择信号sc被供给到接线切换装置60。
[0111]
在选择y接线时,接线选择信号sc设为第1值、例如低,在选择δ接线时,设为第2
值、例如高。
[0112]
零选择信号sz通常设为第1值、例如低,在后述零电流控制的期间中设为第2值、例如高。
[0113]
运转指令部110接受表示由未图示的温度传感器检测的室温(空调对象空间的温度)的信息,接受来自未图示的操作部、例如遥控器的指示,控制空气调节机的各部的动作。在来自操作部的指示中,包括表示设定温度的信息、运转模式的选择、运转开始以及结束的指示等。
[0114]
运转指令部110例如进行使电动机7的定子绕组设为y接线还是设为δ接线的决定以及目标旋转速度的决定,根据决定输出接线选择信号sc以及频率指令值ω
*
。
[0115]
例如,在室温和设定温度的差大时,决定设为δ接线,使接线选择信号sc成为第2值(高),将目标旋转速度设定为比较高的值,输出在起动后逐渐上升至与上述目标旋转速度对应的频率的频率指令值ω
*
。如果达到与目标旋转速度对应的频率,则在室温接近设定温度以前,维持该状态,如果室温接近设定温度,则切换到y接线(为此使接线选择信号sc成为第1值(低)),之后,进行用于维持室温接近设定温度的状态的控制。在该控制中,包括频率的调整、电动机的停止、再起动等。
[0116]
运转指令部110为了从y接线和δ接线的一方切换到另一方而使上述接线选择信号sc的值变化,并且在切换动作中使频率指令值ω
*
以及零选择信号sz的值临时地变化。
[0117]
例如,在切换时,运转指令部110使母线电压指令值vdc
*
以及频率指令值ω
*
临时地成为更大的值。然后,在母线电压指令值vdc
*
以及频率指令值ω
*
设为更大的值的期间中,将零选择信号sz(通常为低)临时地设为高。然后,在零选择信号sz成为高的期间中,将接线选择信号sc从高切换到低或者从低切换到高。
[0118]
关于这样的动作,在后面参照图15的(a)~(e)更详细地说明。
[0119]
直流电源控制部120根据电源电压检测器51、电源电流检测器52以及母线电压检测器53的检测值vs、is、vdc,生成用于驱动pwm转换器23的开关元件的pwm信号xa、xb、ya、yb。
[0120]
pwm信号xa是表示将开关元件332设为导通的期间的信号,有时称为“第1驱动脉冲”。
[0121]
pwm信号xb是表示将开关元件331设为导通的期间的信号,有时称为“第2驱动脉冲”。
[0122]
pwm信号ya是表示将开关元件333设为导通的期间的信号,pwm信号yb是表示将开关元件334设为导通的期间信号。pwm信号ya以及yb有时被称为“同步驱动脉冲”。
[0123]
以下,参照图9的(a)、(b)以及图10的(a)以及(b),说明pwm转换器23的动作。
[0124]
如图9的(a)以及图10的(a)所示,将交流电源1的第1端子1a为正电位时定义为电源电压vs的极性为正,如图9的(b)以及图10的(b)所示,将交流电源1的第1端子1a为负电位时定义为电源电压vs的极性为负。
[0125]
图9的(a)以及图9的(b)示出对平滑电容器25进行充电时的电流路径。关于两者的差异,图9的(a)示出电源电压vs为正极性时的充电路径,图9的(b)示出电源电压vs为负极性时的充电路径。
[0126]
另外,图10的(a)以及图10的(b)示出在不对平滑电容器25进行充电而使交流电源
1的两端经由电抗器21短路时、即经由电抗器21的交流电源1的短路路径。
[0127]
关于两者的差异,图10的(a)示出电源电压vs为正极性时的短路路径,图10的(b)示出电源电压vs为负极性时的短路路径。
[0128]
在开关元件331~334维持为截止状态的情况下,pwm转换器23作为不具有升压功能的全波整流电路动作,根据电源电压的极性,如图9的(a)或者图9的(b)所示,流过对平滑电容器4进行充电的电流。将此时的动作模式称为“通常模式”。
[0129]
另一方面,如图10的(a)所示,在电源电压vs为正极性时,在使开关元件332成为导通时,能够用交流电源1、电抗器21、开关元件332、二极管344、交流电源1这样的路径形成短路路径。
[0130]
另外,如图10的(b)所示,在电源电压vs为负极性时,在使开关元件331成为导通时,能够用交流电源1、二极管343、开关元件331、电抗器21、交流电源1的路径形成短路路径。
[0131]
这样,将形成把电抗器21作为其一部分的短路路径称为“电源短路”,将进行电源短路的控制的动作模式称为“电源短路模式”。
[0132]
通过直流电源控制部120的控制,切换pwm转换器23的动作模式,通过动作模式的切换,切换母线电压指令值vdc
*
。
[0133]
图11是示出在实施方式1所涉及的电动机驱动装置2中使用的直流电源控制部120的结构例的图。如图11所示,直流电源控制部120具有减法部201、母线电压控制部202、电源电压相位运算部204、电源电流指令值运算部206、减法部207、电源电流控制部208、导通占空运算部210、载波生成部212以及pwm信号生成部214。
[0134]
减法部201求出由母线电压检测器53检测的母线电压vdc相对从运转指令部110供给的母线电压指令值vdc
*
的偏差。
[0135]
母线电压控制部202通过针对由减法部201求出的偏差进行比例积分运算,求出用于减小该偏差的电源电流实效值指令值is_rms
*
。
[0136]
此外,在上述例子中,在母线电压控制部202中,作为用于求出电源电流实效值指令值is_rms
*
的运算,进行比例积分运算,但也可以作为母线电压控制部202,替代地使用进行比例运算的例子或者进行比例微分积分运算的例子。
[0137]
电源电压相位运算部204根据由电源电压检测器51检测的电源电压vs,推测电源电压vs的相位,求出推测值θs的正弦值sinθs。
[0138]
图12的(a)~(c)是示出电源电压相位运算部204的动作例的图。横轴的t表示时刻。图12的(a)示出电源电压vs的波形,图12的(b)示出电源电压相位推测值θs的波形,图12的(c)示出相位推测值θs的正弦值sinθs的波形。但是,图12的(a)~(c)示出无由于控制引起的延迟或者由于检测处理引起的延迟的波形。
[0139]
如图12的(a)以及的12的(b)所示,在电源电压vs从负极性切换到正极性的点,电源电压相位推测值θs成为360
°
。电源电压相位运算部204检测电源电压vs从负极性切换到正极性的定时,在该切换的定时对电源电压相位推测值θs进行复位、即返回到零。
[0140]
此外,在控制装置100由微型机构成,为了电源电压相位推测值θs的复位使用微型机的中断功能的情况下,有时在直流电源控制部120(图11)内追加检测电源电压vs的零交叉的电路。不论在哪一情况下,只要能够检测电源电压vs的相位,则可以使用任意的手法。
[0141]
电源电流指令值运算部206运算电源电流瞬时值指令值is
*
。电源电流瞬时值指令值is
*
能够通过母线电压控制部202输出的电源电流实效值指令值is_rms
*
和电源电压相位运算部204输出的相位推测值θs的正弦值sinθs求出。
[0142]
即,is
*
能够通过下式求出:
[0143][0144]
减法部207求出电源电流is相对电源电流瞬时值指令值is
*
的偏差。
[0145]
电源电流控制部208通过针对由减法部207求出的偏差进行比例积分运算,求出用于减小该偏差的导通占空dta。
[0146]
导通占空dta在生成pwm信号xa时被参照。
[0147]
此外,作为电源电流控制部208中的运算,也可以代替比例积分运算,进行比例运算或者比例微分积分运算。
[0148]
导通占空运算部210根据电源电压vs、母线电压vdc以及导通占空dta,运算导通占空dtb。
[0149]
导通占空dtb在生成pwm信号xb时被参照。
[0150]
载波生成部212生成第1载波cwa、第2载波cwb、第3载波cwc以及第4载波cwd。这些载波cwa、cwb、cwc、cwd例如是三角波。
[0151]
第1载波cwa和第2载波cwb相互间具有180
°
的相位差。第3载波cwc和第4载波cwd相互间具有180
°
的相位差。
[0152]
pwm信号生成部214通过比较导通占空dta和第1载波cwa,生成pwm信号xa。
[0153]
另外,pwm信号生成部214通过比较导通占空dtb和第2载波cwb,生成pwm信号xb。
[0154]
进而,pwm信号生成部214通过比较电源电压vs和第3载波cwc,生成pwm信号ya。
[0155]
进而,pwm信号生成部214通过比较电源电压vs和第4载波cwd,生成pwm信号yb。
[0156]
控制装置100如上所述不仅进行直流电源电路20的控制,而且还进行逆变器40的动作的控制以及利用接线切换装置60的接线的切换的控制。
[0157]
为了逆变器40的控制,控制装置100的逆变器控制部160生成pwm信号sm1~sm6,供给到逆变器40。
[0158]
逆变器40如上所述除了逆变器主电路410以外,还具备驱动电路450,该驱动电路450根据pwm信号sm1~sm6生成驱动信号sr1~sr6,通过驱动信号sr1~sr6控制开关元件411~416的导通、截止,由此,将频率可变且电压值可变的3相交流电压施加到电动机7。
[0159]
逆变器控制部160如图13所示,具有电流恢复部161、3相2相变换部162、γ轴电流指令值运算部163、电压指令值运算部165、2相3相变换部166、pwm信号生成部167以及电气角相位运算部168。
[0160]
电流恢复部161根据由母线电流检测器54检测的电流值idc,恢复在电动机7流过的相电流i
u
、i
v
、i
w
。电流恢复部161通过在和与来自pwm信号生成部167的pwm信号对应的交流电压同步的定时,对由母线电流检测器54检测的直流电流idc进行采样,恢复相电流。
[0161]
3相2相变换部162将由电流恢复部161恢复的电流值i
u
、i
v
、i
w
,使用由后述电气角相位运算部168生成的电气角相位θ,变换为用γ轴电流(励磁电流分量)i
γ
以及δ轴电流(转矩电流分量)i
δ
表示的γ-δ轴的电流值。
[0162]
γ轴电流指令值运算部163根据δ轴电流i
δ
,求出为了驱动电动机7而效率最高的
最佳的γ轴电流指令值i
γ*
。
[0163]
此外,在图13中,根据δ轴电流i
δ
,求出γ轴电流指令值i
γ*
,但即使根据γ轴电流i
γ
、频率指令值ω
*
,求出γ轴电流指令值i
γ*
,也能够得到同样的效果。
[0164]
在γ轴电流指令值运算部163中,根据δ轴电流i
δ
(或者γ轴电流i
γ
、频率指令值ω
*
,输出使得成为输出转矩为预定值以上(或者最大)、即电流值为预定值以下(或者最小)的电流相位角βm(未图示)的γ轴电流指令值i
γ*
。
[0165]
电压指令值运算部165将从3相2相变换部162得到的γ轴电流i
γ
及δ轴电流i
δ
、从运转指令部110输出的频率指令值ω
*
以及从γ轴电流指令值运算部163得到的γ轴电流指令值i
γ*
作为输入,输出电压指令值v
γ*
、v
δ*
。
[0166]
电压指令值运算部165例如如图14所示,具有频率推测部1651、减法部1652、频率控制部1653、选择部1654、1655、减法部1656、1657、δ轴电流控制部1658以及γ轴电流控制部1659。
[0167]
频率推测部1651根据γ轴电流i
γ
以及δ轴电流i
δ
和电压指令值v
γ*
、v
δ*
,推测电动机7的频率,生成频率推测值ωest。
[0168]
减法部1652求出由频率推测部1651生成的频率推测值ωest相对频率指令值ω
*
的差分(ω
*-ωest)。
[0169]
频率控制部1653针对由减法部1652求出的差分进行比例积分(pi)运算,求出减小该差分的δ轴电流指令值i
δ*
。通过这样生成δ轴电流指令值i
δ*
,进行用于使频率推测值ωest与频率指令值ω
*
一致的控制。
[0170]
选择部1654根据零选择信号sz,选择并输出δ轴电流指令值i
δ*
和值0中的某一个。例如,在零选择信号sz是第1值(例如低)时,选择部1654选择i
δ*
,在零选择信号sz是第2值(例如高)时,选择部1654选择0。将选择部1654的输出称为选择的δ轴电流指令值,用符号i
δ**
表示。
[0171]
选择部1655根据零选择信号sz,选择并输出γ轴电流指令值i
γ*
和值0中的某一个。例如,在零选择信号sz是第1值(例如低)时,选择部1655选择i
γ*
,在零选择信号sz是第2值(例如高)时,选择部1655选择0。将选择部1655的输出称为选择的γ轴电流指令值,用符号i
γ**
表示。
[0172]
减法部1656求出i
δ
相对选择部1654的输出(选择的δ轴电流指令值)i
δ**
的差分(i
δ**-i
δ
)。
[0173]
δ轴电流控制部1658针对由减法部1656求出的差分进行比例积分(pi)运算,生成减小该差分的δ轴电压指令值v
δ*
。通过这样生成δ轴电压指令值v
δ*
,进行用于使i
δ
与i
δ**
一致的控制。
[0174]
即,在作为i
δ**
选择i
δ*
时,进行用于使i
δ
与i
δ*
一致的控制,在作为i
δ**
选择0时,进行用于使i
δ
与0一致的控制。
[0175]
减法部1657求出i
γ
相对选择部1655的输出(选择的γ轴电流指令值)i
γ**
的差分(i
γ**-i
γ
)。
[0176]
γ轴电流控制部1659针对由减法部1657求出的差分进行比例积分(pi)运算,生成用于减小该差分的γ轴电压指令值v
γ*
。通过这样生成γ轴电压指令值v
γ*
,进行用于使i
γ
与i
γ**
一致的控制。
[0177]
即,在作为i
γ**
选择i
γ*
时,进行用于使i
γ
与i
γ*
一致的控制,在作为i
γ**
选择0时,进行用于使i
γ
与0一致的控制。
[0178]
以下,将用于使δ轴电流i
δ
以及γ轴电流i
γ
与0一致的控制称为“零电流控制”。
[0179]
2相3相变换部166将由电压指令值运算部165得到的γ轴电压指令值v
γ*
以及δ轴电压指令值v
δ*
(2相坐标系的电压指令值),使用由电气角相位运算部168得到的电气角相位θ,变换为3相坐标系的输出电压指令值(3相电压指令值)vu
*
、vv
*
、vw
*
并输出。
[0180]
pwm信号生成部167根据由母线电压检测器53检测的母线电压vdc和从2相3相变换部166输出的3相电压指令值vu
*
、vv
*
、vw
*
,生成并输出pwm信号sm1~sm6。
[0181]
驱动电路450根据pwm信号sm1~sm6,生成驱动信号sr1~sr6。
[0182]
以下,说明在电动机的运转中使接线切换装置60动作时的电动机驱动装置2的动作。
[0183]
最初,使用图2,说明以往技术的问题、即不具备本实施方式的特征的电动机驱动装置中的动作。
[0184]
在电动机运转的过程中,即在构成接线切换装置60的切换器61、62、63流过电流的状态下,操作在励磁线圈611、621、631(图6)中流过的电流的情况(从截止切换到导通或者从导通切换到截止的情况)下,公共接点61c、62c、63c将连接切换到常闭接点61b、62b、63b或者将连接切换到常开接点61a、62a、63a。在引起切换时,在设为继续从逆变器40向电动机7供电时,在切换器61~63的接点之间发生电弧放电,由此存在发生接点熔敷等故障的可能性。
[0185]
为了避免这样的故障,考虑在使接线切换装置60动作之前停止从逆变器40向电动机7供电,设为电动机7的旋转速度nm为零的状态。由此,不会在切换器61~63的接点之间发生电弧放电而能够进行切换。
[0186]
然而,在使电动机7的旋转速度nm成为零时,再启动所需的转矩增加,存在起动时的电流增加或者无法进行再启动的可能性。
[0187]
例如,在电动机7驱动压缩机904的情况下,在刚刚使旋转速度nm成为零之后,制冷剂的状态不稳定,因此,再启动所需的转矩增加。
[0188]
还考虑在从使电动机7的旋转速度nm成为零起经过为了制冷剂的状态充分稳定而所需的时间之后,进行再启动。在该情况下,无法通过压缩机904对制冷剂进行加压,存在由于制冷能力或者制热能力的降低,室温从期望温度的背离变大的可能性。
[0189]
如果以使在接线切换装置60流过的电流成为零的方式控制,并在该状态下使接线切换装置60进行切换动作,则能够防止在切换时在切换器61~63的接点之间发生电弧放电。
[0190]
由此,无需为了切换,使电动机7的旋转速度nm成为零。
[0191]
为了使在接线切换装置60流过的电流成为零,使在电动机7流过的电流成为零即可。
[0192]
为了使在电动机7流过的电流成为零,在图14所示的选择部1654、1655中,代替i
δ*
、i
γ*
而选择值0,作为选择的指令值i
δ**
、i
γ**
供给到电流控制部1658、1659即可。
[0193]
其结果,电流控制部1658进行用于使i
δ
与0一致的控制,电流控制部1659进行用于使i
γ
与0一致的控制。
[0194]
在进行上述零电流控制的情况下,需要留意以下方面。
[0195]
在切换接线时,需要将零电流控制持续某种程度的时间。在零电流控制的期间,输出转矩是零,由于负载转矩,旋转速度降低。
[0196]
零电流控制的期间越长,并且负载转矩越大,则速度的降低幅度越大。
[0197]
在低速下开始零电流控制的情况下,存在旋转速度降低至零附近而失调的可能性。
[0198]
因此,考虑通过使电动机的旋转速度上升,并在该状态下进行零电流控制,防止旋转速度降低至零附近。
[0199]
但是,越高速,电动机的反电动势就越大,需要从逆变器40输出反电动势以上的电压。在逆变器40的调制系数超过1时,如图16所示,进入到输出电压饱和的区域。该区域被称为电压饱和区域或者过调制区域。
[0200]
在输出电压饱和的区域中,为了在外观上使感应电压减少,需要进行使负的d轴电流流过的弱磁通控制。然而,在电压饱和区域中进行零电流控制时,无法流过负的d轴电流,有时电动机的反电动势变得比逆变器的最大的输出电压更大而失调。
[0201]
因此,在本实施方式中,通过直流电源电路20进一步提高母线电压,由此成为逆变器能够输出更高的电压的状态,在该状态下进行零电流控制来切换接线,如果切换结束,则使母线电压复原。由此,能够进行高速区域中的切换。
[0202]
图15的(a)~(e)示出进行接线切换时的控制序列的一个例子。图15的(a)~(e)设想从y接线向δ接线的切换。
[0203]
图15的(a)示出在接线切换装置60流过的电流。图15的(b)示出零选择信号sz。图15的(c)示出接线选择信号sc。图15的(d)示出母线电压指令值vdc
*
。图15的(e)示出频率指令值ω
*
。
[0204]
如图15的(a)~(e)所示,在切换接线之前临时地增大母线电压指令值vdc
*
以及频率指令值ω
*
,在增大的期间进行零电流控制,在进行零电流控制的期间进行接线的切换。
[0205]
以下,更详细地说明。
[0206]
设为在切换处理开始前,在母线电压指令值vdc
*
是某个值(第1电压值)vdc
*
(0),频率指令值ω
*
是某个值(第1频率值)ω
*
(0)的状态下,驱动电动机7。
[0207]
在切换处理开始后,从时刻ta1到时刻ta2,使母线电压指令值vdc
*
成为比上述第1电压值vdc
*
(0)大的值(第2电压值)vdc
*
(1)(图15的(d)),由此,使直流电源电路20提高母线电压vdc。
[0208]
在时刻ta2,如果上升完成,则从时刻tb1到时刻tb2,使频率指令值成为比上述第1频率值ω
*
(0)大的值(第2频率值)ω
*
(1)(图15的(e)),由此,使频率ω上升。
[0209]
之后,在从时刻tc至时刻te的期间,使零选择信号sz的值成为高(图15的(b)),从而作为电流指令值选择零,进行零电流控制(图15的(a)),在零电流控制中,在时刻td,使接线选择信号sc的值从低变化为高(图15的(c)),从而切换接线切换装置60。
[0210]
如果接线切换装置60的切换完成,则从时刻tf1到时刻tf2,使频率指令值ω
*
返回到原来的值(第1频率值)ω
*
(0)(图15的(e)),如果旋转速度降低,则从时刻tg1到时刻tg2,使母线电压指令值vdc
*
返回到原来的值(第1电压值)vdc
*
(0)(图15的(d))。
[0211]
以上,设为无母线电压vdc相对母线电压指令值vdc
*
的延迟,且无频率ω相对频率
指令值ω
*
的延迟,但在有延迟的情况下,在母线电压vd以及频率ω是更大的值的期间,进行接线切换装置60的切换即可。
[0212]
在图15的(a)~(e)中,设想从y接线向δ接线的切换,但从δ接线向y接线的切换也能够同样地进行。但是,在从δ接线向y接线的切换的情况下,图15的(c)的接线选择信号sc并非从低切换到高,而从高切换到低。
[0213]
此外,虽然即便是上述序列以外的序列也没有问题,但为了高速地进行零电流控制,即使提高旋转速度,也需要通过提高母线电压而在非电压饱和区域中驱动电动机。
[0214]
接下来,说明上述零电流控制时的针对直流电源电路20的母线电压指令值vdc
*
的设定值。
[0215]
永久磁铁同步电动机的dq坐标轴的电压方程式如下述的式(4)、(5)所示。
[0216]
vd=(ra+ld
·
p)id-ω
·
lq
·
iq
ꢀꢀꢀ
(4)
[0217]
vq=(ra+lq
·
p)iq+ω
·
ld
·
id+ω
·
φa
ꢀꢀꢀ
(5)
[0218]
在式(4)、(5)中,
[0219]
vd、vq表示电枢电压的dq轴分量,
[0220]
id、iq表示电枢电流的dq轴分量,
[0221]
ld、lq表示dq轴的电感,
[0222]
ra表示电枢绕组电阻,
[0223]
φa表示永久磁铁的电枢交链磁通,
[0224]
p表示微分算子。
[0225]
在上述式(4)、(5)中,通过上述零电流控制,设为id=iq=0,并且,通过零电流控制的继续,设为p
·
id=p
·
iq=0时,成为下式。
[0226]
vq=ω
·
φa
ꢀꢀꢀ
(6)
[0227]
因此,在进行零电流控制的情况下,母线电压vdc在切换时的旋转速度为ω的情况下,需要如式(7)所示升压。
[0228][0229]
电枢交链磁通φa的值根据接线而变化,需要使用接线切换前的值和接线切换后的值中的大的一方。例如,y接线的情况的φa的值是δ接线的情况的φa的倍,所以在从δ接线和y接线的一方切换到另一方的情况下,使用y接线的情况的φa的值。
[0230]
其原因为,例如,在从δ接线切换到y接线的情况下,在作为φa使用δ接线的情况的值并依照式(7)设定母线电压的情况下,还有时在刚刚切换到y接线之后进入到电压饱和区域,无法进行零电流控制。
[0231]
通过以上的动作,能够进行使在电动机7即切换器61、62、63流过的电流如图15(a)所示成为零的电流控制。因此,能够在切换器61、62、63不流过电流的状态下进行切换,在切换时在接点之间不产生电弧放电。因此,在使用机械式继电器时防止接点熔敷,能够实现可靠性高的电动机的驱动装置。
[0232]
另外,在切换时电流不会大幅变化,所以能够抑制由于切换引起的电动机7的旋转速度的急剧变化,能够在抑制噪音以及振动的同时切换接线。
[0233]
因此,能够得到可靠性高的电动机驱动装置。
[0234]
另外,不需要在专利文献1中需要的预备负载,所以即使在流过大电流的条件下,也能够避免设备的大型化。
[0235]
在上述实施方式中,使在电动机7以及接线切换装置60流过的电流成为零,但即使并非零,是预先决定的阈值以下即可。该阈值决定为在接线切换时在接线切换装置60的切换器61、62、63不发生电弧放电的范围或者即使发生也不会成为问题的范围的最大值、或者相对其最大值小稍微的富余量的值即可。
[0236]
总之,利用电动机驱动装置的接线切换如以下所述进行即可。
[0237]
即,从通过接线切换装置60选择第1接线、直流电源电路20的输出电压是第1电压值、且电动机7的旋转速度是第1速度值的第1状态转移到直流电源电路20的输出电压高于上述第1电压值、且电动机7的旋转速度高于上述第1速度值、且在电动机7流过的电流是预先决定的阈值以下的第2状态,在该第2状态下,接线切换装置60进行从选择了上述第1接线的状态向选择了第2接线的状态的切换即可。
[0238]
上述的使电动机7的电流成为预先决定的阈值以下的状态例如是使电动机7的电流成为零的状态。
[0239]
上述“提高的输出电压”最好为与电动机7的旋转速度对应的值。即,最好在使直流电源电路20的输出电压成为与进行切换时的电动机7的旋转速度对应的值的状态下,进行上述切换。
[0240]
在电动机7是永久磁铁电动机的情况下,上述“提高的输出电压”最好满足上述式(7)。即,最好在使直流电源电路20的输出电压成为满足上述式(7)的值的状态下,进行切换。
[0241]
以上,说明为直流电源电路20的pwm转换器23具有对交流电压进行整流的功能和对交流电压进行升压的功能,使这些功能总是发挥。然而,也可以通常不使升压功能发挥,在进行接线切换装置60的切换时发挥。在该情况下,例如,将在不使升压功能发挥的状态下从直流电源电路20输出的电压的值用作直流电源电路20的输出电压的上述第1电压值,将在使升压功能发挥的状态下从直流电源电路20输出的电压的值用作直流电源电路20的输出电压的上述“提高的输出电压”即可。
[0242]
由此,在通常时,pwm转换器23的开关元件331~334不动作,所以能够去掉由于开关元件331~334引起的开关损耗。
[0243]
最好在上述切换之后,使直流电源电路20的输出电压返回到上述第1电压值,使电动机7的旋转速度返回到上述第1速度值。
[0244]
此外,在上述例子中,设为从逆变器40的输入侧的直流电流idc恢复相电流i
u
、i
v
、i
w
的结构,但也可以构成为在逆变器40的输出线431、432、433设置电流探测器,用该探测器检测相电流,在这样的情况下,代替由电流恢复部161恢复的电流而使用由上述探测器检测的电流即可。
[0245]
关于构成pwm转换器23的开关元件331~334以及逆变器主电路410的开关元件411~416的材料,通过不仅是硅(si),而且还使用作为宽带隙半导体的碳化硅(sic)、氮化镓(gan)、金刚石等来构成,能够进一步减少损耗。
[0246]
另外,开关元件331~334以及开关元件411~416也可以代替mosfet而用igbt(insulated gate bipolar transistor,绝缘栅双极晶体管)构成。
[0247]
关于构成开关元件331~334以及开关元件411~416的材料,通过不仅是硅(si),而且还使用作为宽带隙半导体的碳化硅(sic)、氮化镓(gan)、金刚石等来构成,能够进一步减少损耗。
[0248]
实施方式2.
[0249]
在上述实施方式1中,使用具备具有整流功能以及升压功能的pwm转换器23的直流电源电路20,但作为直流电源电路,也可以使用分别构成用于整流的电路和用于升压的电路的结构的例子。
[0250]
图17示出这样的直流电源电路20b的一个例子。
[0251]
图示的直流电源电路20b具有整流电路26、升压斩波器电路27以及电容器25。
[0252]
整流电路26是将二极管261、262、263、264按照桥型连接的全波整流电路。
[0253]
整流电路26的交流端子26a、26b与交流电源1连接。
[0254]
升压斩波器电路27具有电抗器271、二极管272以及开关元件273。
[0255]
电抗器271的一方的端部与整流电路26的正侧直流端子26c连接。二极管272的阳极与电抗器271的另一方的端部连接,其阴极与电容器25的正侧的电极25a连接、因而与正侧的直流母线12a连接。
[0256]
开关元件273由例如mosfet构成。
[0257]
开关元件273的正极主端子(漏极)与电抗器271的第2端部连接,其负极主端子(源极)与整流电路26的负侧直流端子26d连接。
[0258]
整流电路26的负侧直流端子26d与电容器25的负侧的电极连接、因而与负侧的直流母线12b连接。
[0259]
对开关元件273的控制端子(栅极)供给pwm信号za,开关元件273通过pwm信号za进行pwm控制。
[0260]
图18示出生成供给到图17的升压斩波器电路27的开关元件273的pwm信号的直流电源控制部120b的结构例。
[0261]
图18中的、与图11相同的符号表示同一或者同样的构成要素。
[0262]
即,图18的减法部201、母线电压控制部202、电源电流指令值运算部206、减法部207、电源电流控制部208以及电源电压相位运算部204与图11的相同的符号的构成要素相同或者一样。
[0263]
图18的载波生成部212生成单一的载波cwe。
[0264]
该载波cwe是三角波。
[0265]
图18的pwm信号生成部214b通过比较由电源电流控制部208生成的导通占空dta和载波cwe,生成pwm信号za。
[0266]
pwm信号za的导通占空越大,则升压斩波器电路27的输出电压变得越高。
[0267]
此外,也可以代替将pwm信号za原样地用于开关元件273的控制,通过未图示的驱动电路生成与pwm信号za对应的驱动信号,用该驱动信号进行开关元件273的控制。
[0268]
与实施方式1的叙述同样地,既可以使升压斩波器电路27的升压功能总是发挥,也可以通常不发挥、在进行接线切换装置60的切换时发挥。在该情况下,例如,将在不使升压功能发挥的状态下从直流电源电路20b输出的电压的值用作直流电源电路20b的输出电压的上述第1电压值,将在使升压功能发挥的状态下从直流电源电路20b输出的电压的值用作
直流电源电路20b的输出电压的上述“提高的输出电压”即可。
[0269]
由此,在通常时升压斩波器电路27的开关元件273不动作,所以能够消除由于开关元件273引起的开关损耗。
[0270]
实施方式3.
[0271]
在图5的结构中,作为接线切换装置60的各个切换器(61、62、63),使用切换开关。替代地,也可以用常闭开关和常开开关的组合构成各切换器。图19示出该情况下的接线切换装置的结构例。
[0272]
在图19的结构中,代替切换器61的切换开关而使用常闭开关615和常开开关616的组合,代替切换器62的切换开关而使用常闭开关625和常开开关626的组合,代替切换器63的切换开关而使用常闭开关635和常开开关636的组合。
[0273]
如图所示,在常闭开关615、625、635闭合(导通)、常开开关616、626、636打开(截止)的状态下,电动机被y接线,与图示相逆地,在常闭开关615、625、635打开、常开开关616、626、636闭合的状态下,电动机被δ接线。
[0274]
如图19所示,即使在由常闭开关和常开开关的组合构成各切换器的情况下,作为各开关,能够使用电磁接触器。电磁接触器由于导通时的接通损耗小而适合。
[0275]
如图19所示,在由常闭开关和常开开关的组合构成各切换器的情况下,也可以作为各开关,使用用由碳化硅(sic)、氮化镓(gan)、氧化镓(ga2o3)、金刚石等构成的宽带隙半导体(wbg半导体)构成的半导体开关。它们的导通电阻小、并且低损耗且元件发热也少。另外,它们还能够迅速地进行切换动作。
[0276]
即使在这样使用半导体开关的情况下,也能够使切换动作高速动作,但在各半导体中产生几μs程度的动作偏差。因此,在基于电动机7的绕组电阻r和绕组电感l的时间常数l/r非常小的情况下,不仅存在产生急剧的电流变化而发生电动机7的旋转速度的急剧的变化而发生噪音或者振动的可能性,而且还存在半导体发热而热破坏的可能性。
[0277]
因此,在由半导体构成的接线切换装置60中,通过采用零电流控制,不会伴随大的电流变化而能够进行切换。因此,得到不仅能够抑制由于切换引起的电动机7的旋转速度的急剧的变化以及在抑制噪音及振动的同时切换接线,而且还能够得到由于半导体的发热的抑制而能够防止破坏这样的效果。
[0278]
实施方式4.
[0279]
在实施方式1~3中,设想电动机是能够将定子绕组切换到y接线或者δ接线的结构的情况。
[0280]
电动机也可以是用其他方法进行接线的切换的结构。
[0281]
例如,电动机也可以是作为各相的绕组使用由2个以上的绕组部分构成的例子,能够切换到并联接线以及串联接线中的任意接线的结构。
[0282]
在该情况下,能够将构成各相的绕组的2个以上的绕组部分各自的两端部连接到电动机7的外部,用接线切换装置60切换接线。
[0283]
图20示出在y接线的电动机中由2个绕组部分构成各相的绕组,能够将该绕组部分各自的两端部连接到电动机7的外部,用接线切换装置60切换接线的结构。
[0284]
具体而言,u相的绕组71由2个绕组部分711、712构成,v相的绕组72由2个绕组部分721、722构成,w相的绕组73由2个绕组部分731、732构成。
[0285]
绕组部分711、721、731的第1端部经由外部端子71c、72c、73c与逆变器40的输出线431、432、433连接。
[0286]
绕组部分711、721、731的第2端部经由外部端子71g、72g、73g与切换开关617、627、627的公共接点连接。
[0287]
绕组部分712、722、732的第1端部经由外部端子71h、72h、73h与切换开关618、628、638的公共接点连接。
[0288]
绕组部分712、722、732的第2端部经由外部端子71d、72d、73d与中性点节点64连接。
[0289]
切换开关617、627、637的常闭接点与切换开关618、628、638的常闭接点连接。
[0290]
切换开关617、627、637的常开接点与中性点节点64连接。
[0291]
切换开关618、628、638的常开接点与逆变器40的输出线431、432、433连接。
[0292]
由切换开关617、627、637、618、628、638构成接线切换装置60。
[0293]
即使在使用这样的接线切换装置的情况下,也能够与实施方式1~3所示的例子同样地进行接线切换装置60的保护。
[0294]
在图20所示的结构的情况下,在切换开关617、627、637、618、628、638如图示切换到常闭接点侧的状态下,电动机成为串联接线的状态,在切换开关617、627、637、618、628、638切换到与图示相逆的常开接点侧的状态下,电动机成为并联接线的状态。
[0295]
此外,在实施方式4中也如实施方式3叙述的那样,能够代替切换开关而使用常闭开关和常开开关的组合。
[0296]
以上,说明了电动机被y接线、且进行串联接线和并联接线的切换的情况,但电动机也可以被δ接线、且进行串联接线和并联接线的切换。
[0297]
以上,说明将y接线或者δ接线的各相的绕组切换到串联或者并联的结构,但也可以是在y接线或者δ接线的状态下在绕组设置中间抽头并通过用开关单元使绕组的一部分短路来变更驱动所需的电压的结构。
[0298]
总之,电动机是能够切换绕组的接线的例子即可。
[0299]
此外,以上的实施方式所示的结构是本发明的结构的一个例子,当然既能够与其他公知的技术组合,也能够在不脱离本发明的要旨的范围内将一部分省略等而进行变更而构成。
[0300]
产业上的可利用性
[0301]
如以上所述,本发明适用于切换并使用电动机的绕组的、电动机驱动装置以及具备该电动机驱动装置的冷冻循环应用设备。
[0302]
作为冷冻循环应用设备的一个例子,举出空气调节机,但本发明不限于此,还能够应用于例如冰箱、冷冻库、热泵热水器等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1