一种汽液相变驱动的无线寻址仿海星软体机器人的制作方法
[0001]
本发明涉及一种汽液相变驱动的无线寻址仿海星软体机器人,属于仿生技术领域。
背景技术:
[0002]
软体机器人由于其本身良好的柔顺结构、灵活连续的变形特性以及极高的安全性和环境适应性,使其在医疗康复、抢险救灾、资源勘测、管路检测以及军事侦查中有着巨大的应用潜力。现有的流体驱动的软机器人驱动通常需要多条气路输入通道及电缆,以达到每个执行器根据特定的预编程顺序分别充气和放气。机器人通过气路和电缆与外界相连,严重地制约了机器人的活动空间及机器人运动的灵活性。此外,现有的无线软体机器人大多背负电池和硬件控制设备,机器人工作时间、工作环境、体积尺寸等受到限制,如在人体内工作。一些化学驱动的机器人虽然没有电池及外界气源但是不能独立控制其运动,只能实现重复性动作。在软体机器人中,无电池、无栓、多自由度独立控制软体机器人运动是存在挑战性的。
技术实现要素:
[0003]
本发明是为了解决上述所提及到的技术问题,进而提供了一种汽液相变驱动的无线寻址仿海星软体机器人。
[0004]
本发明为解决上述技术问题所采用的技术方案是:
[0005]
一种汽液相变驱动的无线寻址仿海星软体机器人,它包括环向分布的柔性执行部分、位于柔性执行部分中间位置的控制部分及动力部分,其中所述柔性执行部分包括若干条腕足及对应固接在每条腕足底部的柔性形变限制层,所述控制部分包括发射线圈及若干个接收线圈,所述动力部分包括加热膜、位于加热膜上方的汽液相变腔以及位于汽液相变腔内的低沸点液体,每条腕足与汽液相变腔之间均通过流体管道连通,每条流体管道上均设置有流体阀,且所述加热膜与一个接收线圈电连接,若干个流体阀对应与其余若干个接收线圈电连接,软体机器人作动过程中,先通过发射线圈进行无线寻址控制接收线圈相对应的流体阀打开,再通过发射线圈进行无线寻址控制加热膜产生热量,使汽液相变腔内的低沸点液体沸腾变成蒸汽,低沸点液体经流体管道进入腕足内,使腕足产生变形弯曲。
[0006]
进一步地,腕足的数量为五个。
[0007]
进一步地,每条腕足均包括若干腕足腔室,且若干腕足腔室的下部之间连通设置。
[0008]
进一步地,每条腕足的腕足腔室数量为四个。
[0009]
进一步地,动力部分位于控制部分的上方。
[0010]
进一步地,六个接收线圈位于发射线圈的上方。
[0011]
进一步地,所述低沸点液体为乙醚。
[0012]
本发明与现有技术相比具有以下效果:
[0013]
1、本申请控制部分采用无线寻址控制,比现有技术中的无线控制相比,简单且不
需要额外控制芯片,可作为嵌入式器件集成在软体机器人内部。
[0014]
2、本申请采用无线传输供电,比现有技术中的携带电池方案相比较,供电时间更长,对外部环境更友好、无害。
[0015]
3、本申请驱动采用汽液相变方式,可嵌入集成在软体机器人内部,比现有技术中的携带压力源软体机器人相比,重量更轻,整体柔性更高、驱动声音更小。
[0016]
4、本申请只需在汽液相变腔内灌入低沸点液体就能可以实现无携带电池、复杂驱动无线控制的效果,可适用于植入式医疗器械(如人工器官)、无束缚机器人和可穿戴辅助设备。
附图说明
[0017]
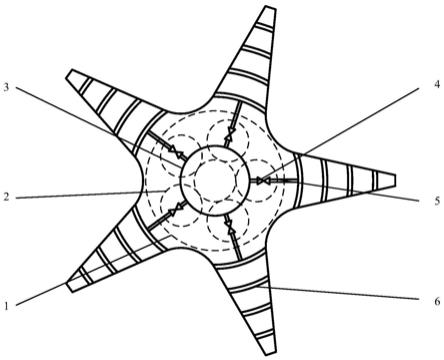
图1为本申请的俯视示意图;
[0018]
图2为无线寻址原理图;
[0019]
图3为本申请非作动状态原理图;
[0020]
图4为本申请作动状态原理图。
具体实施方式
[0021]
具体实施方式一:结合图1~4说明本实施方式,一种汽液相变驱动的无线寻址仿海星软体机器人,它包括环向分布的柔性执行部分6、位于柔性执行部分6中间位置的控制部分及动力部分3,其中所述柔性执行部分6包括若干条腕足6-1及对应固接在每条腕足6-1底部的柔性形变限制层6-2,所述控制部分包括发射线圈1及若干个接收线圈2,所述动力部分3包括加热膜3-1、位于加热膜3-1上方的汽液相变腔3-2以及位于汽液相变腔3-2内的低沸点液体3-3,每条腕足6-1与汽液相变腔3-2之间均通过流体管道5连通,每条流体管道5上均设置有流体阀4,且所述加热膜3-1与一个接收线圈2电连接,若干个流体阀4对应与其余若干个接收线圈2电连接,软体机器人作动过程中,先通过发射线圈1进行无线寻址控制接收线圈2相对应的流体阀4打开,再通过发射线圈1进行无线寻址控制加热膜3-1产生热量,使汽液相变腔3-2内的低沸点液体3-3沸腾变成蒸汽,低沸点液体3-3经流体管道5进入腕足6-1内,使腕足6-1产生变形弯曲。
[0022]
如图2所示,无线寻址的原理是当发射回路里的谐振频率接近或者等于某个接收回路里的谐振频率时,此时接收谐振回路里的阻抗比其它非谐振回路中的阻抗要小很多,因此发射线圈1的能量可以选择性地传到目标接收线圈2,即实现无线寻址传输,本发明用发射回路中的谐振电容来实现选频,从而选择性地控制接收回路的负载“接通”或者“断开”,从而达到无线寻址的目的。
[0023]
如图2所示,图中t
r0
为发射回路,v0为交流电源,k
i
(i=1、2
…
6)为开关,c
0i
(i=1、2
…
6)为六个互不相同的电容,l0为发射线圈电感,r0为发射线圈内阻,当选择性地闭合相应的开关,形成不同的谐振频率,实现选频。r
ei
(i=1、2
…
6)为六个接收回路,l
i
(i=1、2
…
6)为六个接收线圈的电感,r
li
(i=1、2
…
6)为接收线圈的内阻,r
i
(i=1、2
…
5)为五个流体阀的内阻,r6为加热膜的内阻,c
i
(i=1、2
…
6)为构成lc谐振器的电容。
[0024]
接收线圈2可用柔性印刷电路代替。
[0025]
在仿海星机器人作动时,通过发射线圈1进行无线寻址控制接收线圈2相对应的流
体阀4打开,再通过发射线圈1进行无线寻址控制加热膜3-1产生热量,使汽液相变腔3-2内的低沸点液体3-3沸腾变成蒸汽,导致汽液相变腔3-2内压强由p0增大到p1(p0<p1),通过选频控制流体阀4打开,从而将汽液相变腔3-2的低沸点液体3-3经流体管道5压进相应腕足6-1,使腕足6-1膨胀。由于柔性形变限制层6-2不能伸长或收缩,只能产生相应的弯曲,进而使腕足6-1上方膨胀变大,即使腕足6-1整体产生变形弯曲。
[0026]
按照一定的策略控制加热膜3-1加热和流体阀4选择性地开启,就可以使仿法星机器人产生相应的无线独立运动。可用于抢险救灾、资源勘测、管路检测以及军事侦查中。
[0027]
通过无线寻址方式控制软体机器人中的加热膜3-1停止加热,汽液相变腔3-2内的蒸汽则液化成液体,使汽液相变腔3-2内压强减小至p0,再通过发射线圈1选择性地开启流体阀4,从而使腕足6-1内的液体回流,使腕足6-1收缩恢复原状,仿海星机器人停止运动。
[0028]
本申请不需要外界气源,仅需要往机器人体内加入液体即可实现无线独立运动,还能够根据机器人运动所需的自由度进行调整,达到机器人特定运动的要求,不需要在机器人内部安置复杂的控制设备,仅通过外界磁场实现运动控制。这种驱动形式有望将软体机器人制作成为微尺寸级别,实现在人体内工作。
[0029]
腕足6-1的数量为五个。
[0030]
每条腕足6-1均包括若干腕足腔室,且若干腕足腔室的下部之间连通设置。如此设计,使腕足6-1的弯曲变化更灵活,下部连通的若干腕足腔室,使得汽液相变腔3-2内的低沸点液体3-3能够顺利地进入到每个腕足腔室内。
[0031]
每条腕足6-1的腕足腔室数量为四个。
[0032]
动力部分3位于控制部分的上方。
[0033]
六个接收线圈2位于发射线圈1的上方。
[0034]
所述低沸点液体3-3为乙醚。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1