基于STATCOM与HVDC预测控制相互协调的换相失败抑制方法及系统
基于statcom与hvdc预测控制相互协调的换相失败抑制方法及系统
技术领域
1.本发明涉及高压直流输电领域,特别是一种基于statcom与hvdc预测控制相互协调的换相失败抑制方法及系统。
背景技术:
2.lcc-hvdc具有承载容量大、功率快速可控、无功角稳定问题等优势,在大容量远距离输电领域得到广泛的应用。然而,随着直流输电馈入容量的提升,受端电网相对变弱,其安全稳定运行也面临更为严峻的挑战。换相失败是lcc-hvdc系统中常见的故障,也是限制高压直流输电工程进一步发展的主要技术难题。导致换相失败的因素包括换相电压幅值跌落与相位偏移、故障合闸角、谐波含量等。换相失败会使逆变站换流阀形成短路,这会造成传输功率短时中断、直流电流增加,并因此而缩短换流阀使用寿命,导致继保系统误动作。
3.经研究发现受端交流系统短路故障在其发生后数毫秒才会引发换相失败,因此如果在故障发生后的数毫秒内采取合理措施,能降低逆变阀发生换相失败的概率。对改进直流输电系统控制而言,其抑制换相失败的基本思路是在检测到故障时减小触发角指令或直流电流指令。但是,现有首次换相失败抑制方法存在三点不足:一是在获取触发角提前量时仅考虑了换相电压幅值或直流电流,而忽略了换相电压相位偏移对换相过程的影响;二是直流电流指令值减少量的计算需要用到逆变侧换流母线电压信息,所得值传送到整流侧存在延时;三是提前触发控制增加的无功消耗会限制这些控制方法抑制换相失败的能力。
技术实现要素:
4.本发明所要解决的技术问题是,针对现有技术不足,提供一种基于statcom与hvdc预测控制相互协调的换相失败抑制方法及系统,综合考虑换相电压幅值跌落程度、相位偏移情况和直流电流增加量对换相过程的影响,提高了响应速度。为解决上述技术问题,本发明所采用的技术方案是:一种基于statcom与hvdc预测控制相互协调的换相失败抑制方法,包括以下步骤:
5.1)检测y桥换流阀和d桥换流阀的换相电压u
xy
,直流电流id及其变化率k
id
,hvdc控制系统输出的逆变侧触发角指令值α
ni
;其中,x=ab,bc,cd;y=y或d;
6.2)检测换相电压u
xy
的正相过零点,并记录过零点时刻t0;
7.3)利用换相电压u
xy
构造虚拟三相对称电压u
xy_a
、u
xy_b
以及u
xy_c
,将构造的三相对称电压送入锁相环,得到换相电压u
xy
的有效值v
llxy
和相位偏移量
8.4)利用换相电压有效值v
llxy
、相位偏移触发角指令值α
ni
、直流电流id及直流电流变化率k
id
、过零点时刻t0及当前采样时刻ts预测关断角变化量,若关断角变化量预测值δγ
xy
大于第一阈值,则对δγ
xy
进行限幅后输出触发角提前量δα
xy
;利用直流电流id及其变化率k
id
计算直流电流指令变化量,若直流电流指令变化量δi
d_ordxy
大于第二阈值,则对δi
d_ordxy
进行限幅后输出δi
d_ordxy
的最大值;
9.5)对每一相换相电压计算得到的δα
xy
取最大值,得到最终的触发角提前量δαi;对每一相换相电压计算得到的δi
d_ordxy
取最大值,得到最终的直流电流指令减少量δi
d_ord
;
10.6)将δαi经过一阶低通滤波器后得到δα
if
,α
ni
减去δα
if
得到新的触发角指令δα
ordi
,将低压限流环节(vdcol)输出的直流电流指令i
d_ordn
与δi
d_ord
相减得到新的直流电流指令i
d_ord
;其中i
d_ordn
的表达式为:式中,v
dcf
为逆变侧经补偿后的直流电压,其值由逆变侧直流电压v
d_inv
经一阶低通滤波后与0.01倍直流电流id相加获得。
11.本发明hvdc预测控制中触发角提前量的计算过程综合考虑了换相电压幅值跌落程度及相位偏移情况、直流电流及其变化量等因素,响应速度快。
12.步骤3)中,虚拟三相对称电压u
xy_a
、u
xy_b
以及u
xy_c
的表达式为:
[0013][0014]
步骤3)中,相位偏移量的计算公式为:其中,δω=k
pplluxyq
+k
ipll
∫u
xyq
dt;k
ppll
、k
ipll
分别为锁相环pi控制器比例系数和积分系数,θ为锁相环输出相位。
[0015]
步骤4)中,所述直流电流变化率k
id
的计算公式为:其中,id(tk)为当前采样时刻tk的直流电流,id(t
k-1
)为上一采样时刻的电流值,ts为采样周期。本发明利用直流电流变化率预测直流电流,能提高响应速度。
[0016]
步骤4)中,关断角变化量预测值δγ
xy
的计算公式为:其中,a
needf
为故障后成功换相需要的换相电压时间面积,a
needf
=xc[id(α
fi
)+id(α
fi
+μ
fi
)];其中μ
ni
为逆变侧换相角稳态值。
关断角变化量预测值δγ
xy
的计算同时考虑了换相电压幅值及相位、直流电流及其变化率的影响,响应快。
[0017]
步骤5)中,最终的直流电流指令减少量δi
d_ord
的计算公式为:其中,δt
μ0
为换相过程持续时间,α
i0
和为逆变侧触发角。降低直流电流指令能抑制直流电流的抬升,进而能够减少换相面积,且直流电流指令减少量δi
d_ord
的计算仅需检测直流电流,可在整流站实现,不存在延时问题。
[0018]
本发明还包括对statcom进行无功补偿控制,具体实现过程包括:
[0019]
a)测量statcom并网变压副边侧三相电压v
st
、三相输出电流i
st
以及链式statcom子模块直流电压u
dc
,并用一阶低通滤波器对v
st
和i
st
进行滤波,得到v
stf
和i
stf
;
[0020]
b)对v
stf
和i
stf
做abc/αβ变换,得到αβ坐标系下的电压电流值v
stfα
、v
stfβ
和i
stfα
、i
stfβ
,将v
stf
送入锁相环,获取并网电压幅值v
pk
及相位θ
pll
;
[0021]
c)对所有子模块直流电压u
dc
求和后除以3,得到一相直流电压平均值u
dcavg
,u
dcavg
与直流电压指令u
dcref
之差e
udc
送入直流电压调节pi控制器,得到有功指令幅值i
dref
;将有功指令幅值i
dref
分别与sinθ
pll
、sin(θ
pll-2/3π)和sin(θ
pll
+2/3π)相乘,得到三相坐标系下的有功电流指令;将无功指令幅值i
qref
分别与cosθ
pll
、cos(θ
pll-2/3π)和cos(θ
pll
+2/3π)相乘,得到三相坐标系下无功电流指令;将有功电流指令与无功电流指令相加得到最终的三相坐标系下的输出电流指令i
abcref
;
[0022]
d)对输出电流指令i
abcref
进行abc/αβ变换,得到αβ坐标系下的输出电流指令i
αref
和i
βref
;将i
αref
、i
βref
分别对应与i
stfα
、i
stfβ
相减,得到电流误差e
iα
和e
iβ
,e
iα
、e
iβ
经过pr控制器后得到电压调节量v
adα
、v
adβ
;
[0023]
e)将电压调节量v
adα
、v
adβ
分别对应与前馈电压v
stfα
、v
stfβ
相加,得到αβ坐标系下的调制电压v
mα
、v
mβ
,然后将v
mα
、v
mβ
进行abc/αβ变换,得到三相坐标系下的调制电压信号vm,并利用载波移相调制方法得到statcom各子模块的驱动信号。
[0024]
本发明statcom及其无功补偿控制在故障发生后可快速根据触发角提前量计算输出无功功率指令,补偿提前触发控制增加的无功消耗。
[0025]
步骤c)中,无功指令幅值i
qref
的计算过程包括:
[0026]
i)将并网电压幅值v
pk
与指令值v
pkref
相减,得到交流电压幅值误差ev,ev经过pi控制器后得到无功电流指令i
qref1
:根据所述最终的触发角提前量δαi计算暂态无功指令δq
inv
,δq
inv
与-2/(3v
pk
)相乘并经过限幅后得到i
qref2
;其中δq
inv
表达式为:v
ll
为换流母线线电压有效值,βi为逆变阀触发超前角,rd为直流线路电阻,r
ci
为换流变等效换相电阻,ti为换流变变比,φ为逆变功率因数角;
[0027]
j)比较δαi与第一阈值的大小,得到逻辑变量is_fault,再将is_fault送入下降沿检测器,得到信号np;如果is_fault=1,则将i
qref2
赋给i
qref
;如果is_fault=0,且np为正向脉冲信号,则将k*i
qref1
+(1-k)*i'
qref2
赋给i
qref
;其它情况则直接将i
qref1
赋给i
qref
;其中,
i'
qref2
为一个电网周期内的i
qref2
最小值;k为i
qref
切换过程中i
qref1
的占比系数。
[0028]
本发明给出了触发角提前量δαi与逆变侧增加的无功消耗δq
inv
之间的定量关系,statcom能迅速补偿因提前触发增加的无功消耗,提高了系统抑制换相失败的能力。
[0029]
步骤j)中其中,t
np
为is_fault下降沿触发时刻;t1为单稳脉冲宽度;t2为积分时间常数。本发明能实现i
qref
从i
qref2
到i
qref1
的平滑切换,避免了i
qref
在切换过程中的大幅波动。
[0030]
本发明还提供了一种基于statcom与hvdc预测控制相互协调的换相失败抑制系统,其包括计算机设备;所述计算机设备被配置或编程为用于执行本发明所述方法的步骤。
[0031]
与现有技术相比,本发明所具有的有益效果为:
[0032]
(1)hvdc预测控制中触发角提前量的计算过程综合考虑了换相电压幅值跌落程度及相位偏移情况、直流电流及其变化量等因素,响应速度快;
[0033]
(2)hvdc预测控制中直流电流指令减少量的计算仅需测量直流电流,可在整流侧实现,不存在延时问题;
[0034]
(3)statcom及其无功补偿控制在故障发生后可快速根据触发角提前量计算输出无功功率指令,补偿提前触发控制增加的无功消耗;
[0035]
(4)pscad/emtdc电磁暂态仿真结果表明,本发明抑制换相失败的效果要好于hvdc预测控制或statcom无功补偿控制单独应用时的效果。
附图说明
[0036]
图1为本发明实例中含statcom的高压直流输电系统;
[0037]
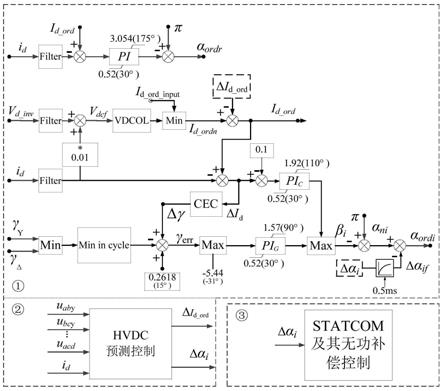
图2为本发明实例中基于statcom与hvdc预测控制相互协调的换相失败抑制方法的整体框架;
[0038]
图3为本发明实例中hvdc预测控制框图;
[0039]
图4为本发明实例中statcom无功补偿控制框图。
具体实施方式
[0040]
参见图1,为本发明实例中含statcom的高压直流输电系统,statcom为星型级联h桥的结构,其输出经过电感l滤波后通过升压并网变压器与逆变站换流母线相接。
[0041]
参见图2,本发明实例中基于statcom与hvdc预测控制相互协调的换相失败抑制方法的整体框架,该框架包括三部分:
①
为标准直流控制器,在正常下,整流侧工作于定电流模式,逆变侧工作于定关断角模式;
②
为hvdc预测控制,该模块根据采样到的各换相电压及直流电流快速计算出触发角提前量δαi和δi
d_ord
,并将其送入标准直流控制器,另外将δαi送入statcom无功补偿控制;
③
为statcom及其无功补偿控制,在故障发生后,其可根据触发角提前量δαi的大小计算出暂态无功指令并快输出无功电流。
[0042]
本发明包括hvdc预测控制、statcom及其无功补偿控制;所述statcom为星型级联h桥的结构,其输出经过电感l滤波后通过升压并网变压器与逆变站换流母线相接;所述hvdc预测控制根据换相电压幅值跌落程度、相位偏移情况和直流电流增加量快速计算出触发角提前量和直流电流指令减少量,以增加换流阀换相裕度;statcom及其无功补偿控制则根据
触发角提前量计算输出无功功率指令,以补偿系统提前触发控制增加的无功消耗。
[0043]
图3为本发明实例中hvdc预测控制,包括过零检测器ⅰ、换相电压有效值及相位检测模块ⅱ、关断角变化量预测模块ⅲ以及直流电流指令减少量计算模块ⅳ四部分内容,其计算步骤包括:
[0044]
(1)检测y桥换流阀和d桥换流阀的换相电压u
xy
(x=ab,bc,cd;y=y或d),直流电流id及其变化率k
id
,原直流控制系统输出的逆变侧触发角指令值α
ni
;
[0045]
(2)利用过零检测器检测换相电压u
xy
的正相过零点,并记录下过零点时刻t0;
[0046]
(3)利用换相电压u
xy
构造虚拟三相对称电压u
xy_a
、u
xy_b
以及u
xy_c
,然后将构造的三相电压送入锁相环(pll)得到换相电压u
xy
的有效值v
llxy
和相位偏移量
[0047]
(4)将换相电压有效值v
llxy
、相位偏移触发角指令值α
ni
、直流电流id及其变化率k
id
、过零点时刻t0及当前采样时刻ts送入关断角变化量预测模块,若输出的关断角变化量预测值δγ
xy
大于阈值0.087rad(5
°
)(第一阈值),则对δγ
xy
进行限幅后输出为触发角提前量δα
xy
,其中阈值和限幅值可根据实际系统调整;
[0048]
(5)将直流电流id及其变化率k
id
送入直流电流指令变化量计算模块,若所得直流电流指令减少量δi
d_ordxy
大于阈值0.02p.u.(第二阈值),则对δi
d_ordxy
进行限幅后输出,其中阈值和限幅值可根据实际系统调整;
[0049]
(6)对每一相换相电压计算得到的δα
xy
取最大值得到最终的触发角提前量δαi,同样对每一相换相电压计算得到的δi
d_ordxy
取最大值得到最终的直流电流指令减少量δi
d_ord
;
[0050]
(7)将得到的触发角提前量δαi和直流电流指令减少量δi
d_ord
送到原始直流控制器中,其中δαi经过一阶低通滤波器后得到δα
if
,然后δα
ni
减去δα
if
得到新的触发角指令δα
ordi
,而低压限流环节(vdcol)输出的直流电流指令i
d_ordn
与δi
d_ord
相减得到新的直流电流指令i
d_ord
。
[0051]
步骤(1)中的直流电流id为电流传感输出值经过滤波后所得值,其中滤波器传递函数为:
[0052][0053]
而直流电流变化率k
id
为id的导数,其计算式为:
[0054][0055]
式中,id(tk)为当前采样时刻的直流电流,id(t
k-1
)为上一采样时刻的电流值,ts为采样周期。
[0056]
步骤(3)中:
[0057]
(a)构造的虚拟三相对称电压表达式为
[0058][0059]
(b)对虚拟三相对称电压进行dq变换,得到u
xyd
和u
xyq
,其计算式为
[0060][0061]
而换相电压有效值
[0062]
(c)对u
xyq
进行pi控制,得到δω,δω的计算式为
[0063]
δω=k
pplluxyq
+k
ipll
∫u
xyq
dt
[0064]
然后再对δω积分得到相位偏移
[0065][0066]
步骤(4)中关断角变化量预测模块的计算式为
[0067][0068]
其中,a
needf
为故障后成功换相需要的换相电压时间面积,其表达式为:
[0069]aneedf
=xc[id(α
fi
)+id(α
fi
+μ
fi
)]
[0070]
而id(α
fi
)和id(α
fi
+u
fi
)的计算式为
[0071][0072]
步骤(4)中直流电流指令变化量计算模块的计算式为
[0073][0074]
式中,δt
μ0
为换相过程持续时间,其取值2ms。
[0075]
参见图4,为本发明实例中statcom无功补偿控制,包括测量单元ⅰ、直流电压控制环ⅱ、无功电流计算模块ⅲ以及电流控制环ⅳ四部分,其实现步骤为:
[0076]
(1)测量statcom并网变压副边侧电压v
stx
、输出电流i
stx
(x=a,b,c)以及链式statcom子模块直流电压u
dc
,并用一阶低通滤波器对v
stx
和i
stx
进行滤波得到v
stfx
和i
stfx
;
[0077]
(2)对v
stfx
和i
stfx
做abc/αβ变换,得到αβ坐标系下的电压电流值v
stfα
、v
stfβ
和i
stfα
、i
stfβ
,将v
stf
送入锁相环获取并网电压幅值v
pk
及相位θ
pll
;
[0078]
(3)对所有子模块直流电压u
dc
求和后除以3得到一相直流电压平均值u
dcavg
,u
dcavg
与直流电压指令u
dcref
之差e
udc
送入直流电压调节pi控制器,得到有功指令幅值i
dref
:
[0079]idref
=k
pueudc
+k
iu
∫e
udc
dt
[0080]
式中,k
pu
、k
iu
分别为直流电压pi控制器的比例和积分系数。
[0081]
然后将有功指令幅值i
dref
分别与sinθ
pll
、sin(θ
pll-2/3π)和sin(θ
pll
+2/3π)相乘得到三相坐标系下的有功电流指令:
[0082][0083]
(4)将无功指令幅值i
qref
分别与cosθ
pll
、cos(θ
pll-2/3π)和cos(θ
pll
+2/3π)得到三相坐标系下无功电流指令:
[0084][0085]
将有功电流指令与无功电流指令相加得到最终的三相坐标系下的输出电流指令:
[0086][0087]
(5)将输出电流指令i
xref
(x=a,b,c)进行abc/αβ变换,得到αβ坐标系下的输出电流指令i
αref
和i
βref
:
[0088][0089]
将i
αref
、i
βref
分别与i
stfα
、i
stfβ
相减得到电流误差e
iα
和eiβ,e
iα
、e
iβ
经过pr控制器后得到电压调节量v
adα
、v
adβ
:
[0090][0091]
式中,k
pi
、k
ii
分别为pr控制器的比例和积分系数,ω0为中心频率,其值为100π;
[0092]
(6)将电压调节量v
adα
、v
adβ
分别与前馈电压v
stfα
、v
stfβ
相加得到αβ坐标系下的调制电压v
mα
、v
mβ
,然后将v
mα
、v
mβ
进行abc/αβ变换得到三相坐标系下的调制电压信号v
mx
(x=a,b,c),并利用载波移相调制方法得到statcom各子模块的驱动信号:
[0093][0094]
步骤(4)中无功指令i
qref
的计算过程如下:
[0095]
(a)将并网电压幅值v
pk
与指令值v
pkref
相减得到交流电压幅值误差ev,ev经过pi控制器后得到无功电流指令i
qref1
:
[0096]iqref1
=k
piev
+k
ii
∫evdt
[0097]
式中,k
pi
、k
ii
分别为交流电压pi控制器的比例和积分系数;
[0098]
(b)根据hvdc预测控制输出的触发角提前量δαi计算暂态无功指令δq
inv
,δq
inv
与-2/(3v
pk
)相乘并经过限幅后得到i
qref2
,其中δq
inv
表达式为:
[0099][0100]
式中,v
ll
为换流母线线电压有效值,βi为逆变阀触发超前角,rd为直流线路电阻,r
ci
为换流变等效换相电阻,ti为换流变变比,φ为逆变功率因数角;
[0101]
(c)比较δαi与0.0876rad(5
°
)的大小,得到逻辑变量is_fault,再将is_fault送入下降沿检测器得到信号np;
[0102]
(d)如果is_fault=1,则将i
qref2
赋给i
qref
;如果is_fault=0并且np为正向脉冲信号,则将k*i
qref1
+(1-k)*i'
qref2
赋给i
qref
;其它情况则直接将i
qref1
赋给i
qref
。
[0103]
过程(d)中,i'
qref2
为一个电网周期内的i
qref2
最小值,k为i
qref
切换过程中i
qref1
的占比系数,其值被限制在0到1内,其表达式为:
[0104][0105]
式中,t
np
为is_fault下降沿触发时刻;t1为单稳脉冲宽度;t2为积分时间常数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1