一种开关磁阻电机制动控制系统及控制方法与流程
[0001]
本发明涉及一种开关磁阻电机制动控制系统及控制方法,属于开关磁阻电机速度控制领域。
背景技术:
[0002]
目前,开关磁阻电机定转子均为硅钢片叠压而成,定子上绕有绕组,转子上无绕组、永磁体等结构,具有效率高、可靠性好、结构简单而坚固和成本低等优点。此外,srm还具有起动性能好,调速范围广,容易实现四象限运行等优点,因此在电动汽车驱动系统、家用电器、矿山机械等领域得到了广泛应用。
[0003]
开关磁阻电机常用的制动策略主要可分为能量回馈制动和能耗制动。能耗制动是一种将动能转化为电能再通过制动电阻转化为热能的制动方式,通常会在功率电路中加入制动电能释放回路,在制动时通过制动电阻将能量消耗掉,实现电机的快速制动,如专利cn110829906a公开的。能量回馈制动是在电机运行过程中,将动能转化为电能回馈到母线上的一种制动方式,制动产生的能量会对母线电压产生严重的影响,尤其对于采用整流桥供电的开关磁阻电机调速系统来说,严重时会毁坏电路。因此,对于开关磁阻电机驱动系统制动策略来说,能耗制动有着极其重要而意义,但是目前的能耗制动控制系统需要独立的制动单元及制动电阻,电路复杂,零部件多,产品成本高。
技术实现要素:
[0004]
本发明所要解决的技术问题是,克服现有技术的不足,提供一种开关磁阻电机制动控制系统及控制方法,解决了能量回馈制动方法对母线储能元件或蓄电池等电路元器件的损坏问题及能耗制动电路复杂、零部件多、产品成本高的问题。
[0005]
为了解决上述技术问题,本发明的技术方案是:
[0006]
一种开关磁阻电机制动控制系统,它包括:
[0007]
功率主电路,所述功率主电路适于对不同相绕组轮流进行励磁和能耗制动控制,对开关磁阻电机进行快速电磁制动;
[0008]
控制单元,所述控制单元包括控制器模块、位置信号模块和电流采样模块,所述位置信号模块和电流采样模块适于采集电机的位置信号和电流信号,所述控制器模块根据采样到的位置信号和电流信号向功率主电路发送驱动信号;
[0009]
整流单元,所述整流单元适于将外部交流电源转换为整个控制系统工作所需的直流电源。
[0010]
进一步,所述功率主电路包括n个不对称半桥,n个所述不对称半桥分别对应开关磁阻电机的n相,每个所述不对称半桥包括驱动电路、两个二极管和两个开关管,所述二极管和开关管分别串联在绕组的上下两侧,所述驱动电路的两个输出端分别与两个开关管相连,所述驱动电路的输入端与控制器模块相连。
[0011]
进一步,所述控制器模块输出的驱动信号经过驱动电路后输送给两个开关管,所
述驱动电路为隔离放大电路。
[0012]
进一步,两个所述开关管的集电极和发射极之间均反并联续流二极管。
[0013]
进一步,所述开关管为功率场效应晶体管或绝缘栅双极型晶体管。
[0014]
进一步,所述位置信号模块设置有n个,n为开关磁阻电机的相数,n个所述位置信号模块将得到的n相开关磁阻电机的位置信号依次输入控制器模块。
[0015]
进一步,每相邻两个所述位置信号模块之间的夹角为1/n电周期。
[0016]
进一步,所述整流单元为桥式整流电路,所述桥式整流电路由四个整流二极管和稳压电容组成。
[0017]
进一步,所述电流采样模块为电流采样电阻,所述电流采样电阻串联在电机的每一相上。
[0018]
进一步,所述电流采样模块为霍尔电流传感器和调制板,所述霍尔电流传感器将采集到的每一相的电流信号,通过调制板转换为模拟量传输到控制器模块。
[0019]
一种开关磁阻电机制动控制系统的控制方法,包括:
[0020]
步骤s1、控制单元接收制动信号,进入制动模式;
[0021]
步骤s2、控制单元通过电机的位置信号进行位置识别;
[0022]
步骤s3、判断电机的相电感是否位于电感上升区,若是,则选取部分电感上升区进行励磁控制,若否,则进入步骤s5;
[0023]
步骤s4、判断电机的相电流是否小于所设定阈值,若是,则进行励磁控制,若否,则进行能耗制动控制;
[0024]
步骤s5、电机的相电感位于电感下降区,判断电机的相电流是否大于所设定阈值,若是,则进行能耗制动控制,若否,则进行励磁控制。
[0025]
采用了上述技术方案,本发明将制动产生的电能通过电机绕组转化为热能消耗掉。与现有的制动控制相比,解决了能量回馈制动方法对母线储能元件或蓄电池等电路元器件的损坏问题,同时以电机绕组替代制动电阻,在满足制动效果的基础上,简化了电路结构,降低了生产成本。
附图说明
[0026]
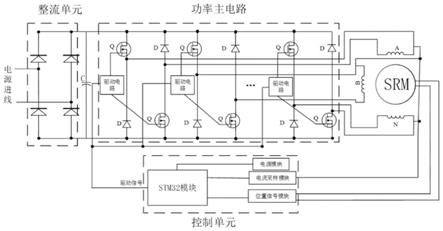
图1为本发明的一种开关磁阻电机制动控制系统的原理框图;
[0027]
图2为本发明的功率主电路的电路原理图;
[0028]
图3为本发明的四相八线的开关磁阻电机的控制系统的原理图;
[0029]
图4为本发明的一种开关磁阻电机制动控制系统的控制方法的流程图;
[0030]
图5为本发明的一种开关磁阻电机制动控制系统的励磁回路的电路图;
[0031]
图6为本发明的一种开关磁阻电机制动控制系统的续流回路的电路图
[0032]
图7为本发明的一种开关磁阻电机制动控制系统的a相理想相电感与驱动信号关系图;
[0033]
图8为本发明的电机转速、a相电流、制动转矩及母线电压仿真波形。
具体实施方式
[0034]
为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对
本发明作进一步详细的说明。
[0035]
实施例一
[0036]
如图1所示,一种开关磁阻电机制动控制系统,它包括:功率主电路、控制单元和整流单元。功率主电路适于对不同相绕组轮流进行励磁和能耗制动控制,对开关磁阻电机进行快速电磁制动;控制单元包括控制器模块(可以是dsp模块、stm32模块、fpga等)、位置信号模块和电流采样模块,位置信号模块和电流采样模块适于采集电机的位置信号和电流信号,控制器模块根据采样到的位置信号和电流信号向功率主电路发送驱动信号;整流单元适于将外部交流电源转换为整个控制系统工作所需的直流电源。
[0037]
如图2所示,功率主电路包括n个不对称半桥,n个不对称半桥分别对应开关磁阻电机的n相,每个不对称半桥包括驱动电路、两个二极管和两个开关管,二极管和开关管分别串联在绕组的上下两侧,驱动电路的两个输出端分别与两个开关管相连,驱动电路的输入端与控制器模块相连。ln+和ln-分别与绕组正负极相连,n为开关磁阻电机的相数,dc+、dc-与直流电源的正负极相接。
[0038]
如图1所示,控制器模块输出的驱动信号经过驱动电路后输送给两个开关管,驱动电路为隔离放大电路,两个开关管的集电极和发射极之间均反并联续流二极管,开关管为功率场效应晶体管或绝缘栅双极型晶体管。
[0039]
如图1所示,位置信号模块设置有n个,位置信号模块采用光电开关或者霍尔传感器,n为开关磁阻电机的相数,n个位置信号模块将得到的n相开关磁阻电机的位置信号依次输入控制器模块。每相邻两个位置信号模块之间的夹角为1/n电周期,其夹角可以调整为1/n电周期与整数倍的电周期之和。
[0040]
如图1所示,整流单元为桥式整流电路,桥式整流电路由四个整流二极管和稳压电容组成。
[0041]
如图1所示,电流采样模块可采用电流采样电阻,电流采样电阻串联在电机的每一相上,实现对电相流的监控。
[0042]
如图1所示,电流采样模块也可以采用霍尔电流传感器和调制板,霍尔电流传感器将采集到的每一相的电流信号,通过调制板转换为模拟量传输到控制器模块,实现对相电流的监控。
[0043]
如图3所示,本实施例中以四相八线8/6的开关磁阻电机为例,四相八线8/6开关磁阻电机包括8个沿圆周等距分布的定子齿和6个沿圆周等距分布的转子凸极。该电机8个定子齿上分别绕有8个线包,将其命名为a1、a2、b1、b2、c1、c2、d1、d2,其中字母代表相,属于同一相的两个线包并联组成电机的一相绕组,其出线端分别定义为a+、a-、b+、b-、c+、c-、d+、d-,其中字母代表相位,符号“+”代表进线,符号
“-”
代表出线。电机额定功率为1000w,额定电压dc310v,额定转速8000rpm,高低速兼容,高速18000rpm,扭矩>0.42n
·
m,低速100rpm,扭矩>2.2n
·
m。
[0044]
基于整流桥交流供电的四相不对称半桥功率变换器,如图3所示,其主要由整流电路和不对称半桥功率电路组成。整流电路为桥式整流电路,其由四个整流二极管和稳压电容c组成。不对称半桥功率电路由八个开关管(sau、sad、sbu、sbd、scu、scd、sdu、sdd)、八个功率二极管(dau、dad、dbu、dbd、dcu、dcd、ddu、ddd)及稳压电容组成。abcd相连接方式如图3所示。
[0045]
电流采样模块是在功率变换器上的每相绕组上串联一个采样电阻,根据比例实现对电流的实际检测与监控。
[0046]
位置信号传感模块主要有光耦限流电阻和两个光电开关m1、m2组成。光耦原边与限流电阻串联由电源模块供电,其副边发射极接地,集电极采用上拉输出。两个光电开关在位置上相差15
°
机械角度,由于a相和c相相位差180
°
电角度,因此m1用于控制a相和c相,b相和d相同理。光电开关也可以采用4个,此处因为a相和c相相位差180
°
电角度,根据a相的位置,可以推算出b相的位置,所以只需要两个,可以减少零部件的数量。
[0047]
本实施例中控制器模块采用stm32处理器,其输出sau、sad、sbu、sbd、scu、scd、sdu、sdd八个信号分别作为sau、sad、sbu、sbd、scu、scd、sdu、sdd八个开关管的驱动信号。
[0048]
实施例二
[0049]
如流程图4所示,一种开关磁阻电机制动控制系统的控制方法,包括:
[0050]
步骤s1、控制单元接收制动信号,进入制动模式;
[0051]
步骤s2、控制单元通过电机的位置信号进行位置识别;
[0052]
步骤s3、判断电机的相电感是否位于电感上升区,若是,则选取部分电感上升区进行励磁控制,若否,则进入步骤s5;
[0053]
步骤s4、判断电机的相电流是否小于所设定阈值,若是,则进行励磁控制,若否,则进行能耗制动控制;
[0054]
步骤s5、电机的相电感位于电感下降区,判断电机的相电流是否大于所设定阈值,若是,则进行能耗制动控制,若否,则进行励磁控制。
[0055]
结合流程图4进行步骤介绍:
[0056]
在电机运行过程中,若控制单元接收到制动信号,则进入制动模式,根据位置信号,判断相电感上升区和下降区,对相电流进行分段励磁和能耗制动控制。
[0057]
励磁控制用于建立励磁磁场,导通对应开关管snu、snd,形成励磁回路如图5所示,即电源
→
上开关管
→
相绕组
→
下开关管
→
电源闭合回路,电源给绕组供电,建立励磁磁场。通过控制励磁阶段相电流的大小来调节励磁磁场的强弱,进而达到调节制动转矩的目的。相电流控制方法包括可以是电流斩波控制、pwm电压控制、角度位置控制等控制方法。
[0058]
能耗制动控制用于消耗能量,关断snu导通snd,如图6所示,即相电流的续流路径为功率二极管、相电阻、续流二极管的闭合路径,制动产生的电能在功率主回路的开关管、相绕组和续流二极管上直接消耗转化为热能。
[0059]
若电机相电感位于电感上升区,则选取部分电感上升区(包含0%-100%电感上升区)进行励磁控制,若相电流大于所设定阈值则进行能耗制动控制,否则进行励磁控制。
[0060]
当相电感位于电感下降区时,若相电流小于所设定的阈值,则进行励磁控制,否则进行能耗制动控制。
[0061]
根据位置信号和相电流大小,控制器控制功率主电路对不同相相绕组轮流进行励磁和能耗制动控制,如此循环往复,实现开关磁阻电机的快速电磁制动,直至电机转速为零,制动结束。
[0062]
采用本发明所述控制方法,对四相开关磁阻电机驱动系统,可以对a、b、c、d四相绕组进行制动控制,也可以采用部分相绕组进行制动控制。本实施例实施一种相邻两相绕组直通(直通的意思是全部电感上升区进行励磁)能耗制动方法,本实施例以ab两相为例进行
说明。图7为a相理想相电感与驱动信号关系图,b相关系图类似。
[0063]
设置制动电流阈值为1a,根据位置信号,在电感下降区,若ab两相电流未达到所设定阈值,则导通其对应开关管sau、sad或sbu、sbd,哪一相未达到所设定阈值就导通哪一相对应的开关管。通过电源正极、上开关管、相绕组、下开关管、电源负极闭合回路对相绕组进行励磁,使电流快速达到所设阈值,若电流大于所设电流阈值,则关断sau导通sad使电流经下开关管、相绕组、下功率二极管闭合回路进行能耗制动续流,机械能转化所得电能经能耗制动续流回路功率开关管、相绕组、功率二极管直接消耗转换为热能;在电感上升区,关断sau导通sad继续进行能耗制动续流,机械能继续转化为电能消耗在电机绕组和开关器件上。
[0064]
图8所示为电机转速为10000r/min时,采用本方法电机转速、制动电流、制动转矩以及母线电压仿真图。由图可知,本方法在产生足够制动转矩的同时,并未抬升母线电压,不会造成能量回馈到母线损坏电子元件现象的发生,实现了电机的安全快速制动,验证了本发明方法的可行性。
[0065]
以上的具体实施例,对本发明解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1