一种双惯量伺服系统的自适应齿隙振荡抑制方法
1.本发明属于高精度交流伺服控制系统技术领域,涉及一种双惯量伺服系统的自适应齿隙振荡抑制方法。
背景技术:
2.随着伺服驱动技术的不断发展,高性能伺服系统已经被广泛应用于各个领域,其相关研究和发展也受到了广泛关注。伺服系统最早被用于军事国防,如雷达追踪定位、自动瞄准,导弹发射等,后来在工业上得到了广泛的应用,适用于数控机床、造纸机、机械手和铣床等。具有高刚度传动部件的直接驱动系统主要用于高性能工业应用。
3.伺服驱动控制技术在智能制造、工业数字化方面有着举足轻重的地位。然而,实际工况中机械系统普遍存在一些非线性现象,如非线性摩擦,齿隙和外部干扰。在这些非线性中,传动装置中齿隙的出现尤为严重降低了伺服系统的性能。为了保证齿轮传动系统的正常运行,在齿轮啮合的前提下都会留有一定的间隙,齿轮尺寸越大,相应的齿隙也会越大,而且传动系统一般都是多级传动,而齿隙的存在会使机械谐振更剧烈,甚至使控制系统发散。如全数字化数控机床在加工零件时,由于齿轮传动发生振荡,会造成加工表面粗糙,带来无法估计的经济损失;再如工业机器人中,机械臂定位的时候,末端会发生抖振现象,无法实现“稳停”和“准停”,增加了系统的调节时间,降低了工作效率,有的甚至会使系统发散,造成人员伤亡。滑模变结构控制的特点是系统的“结构”并不固定,根据系统当前状态进行动态调整,从而使系统按照预定“滑动模态”运动,由于滑动模态可以进行设计,这就使得变结构控制具有响应速度快及具有很强的鲁棒性等优点,被广泛应用于控制系统。此外,由于齿隙非线性的存在难以实现控制器对系统的未知项进行精确建模,该缺点也直接影响了双惯量伺服系统的控制性能。
技术实现要素:
4.本发明的目的是提供一种双惯量伺服系统的自适应齿隙振荡抑制方法,解决了现有双惯量伺服系统中由于齿隙引起振荡的问题。
5.本发明所采用的技术方案是,一种双惯量伺服系统的自适应齿隙振荡抑制方法,具体包括如下步骤:
6.步骤1,在d
‑
q坐标系下,建立永磁同步电机数学模型,得到电磁转矩表达式;
7.步骤2,以转速和位置为状态变量建立双惯量伺服传动系统动力学数学模型;
8.步骤3,转速环采用滑模控制方法,基于步骤2得到的双惯量系统动力学的数学模型和步骤1电磁转矩表达式,设计滑模控制器的滑模控制率;
9.步骤4,建立可微非对称死区模型,采用差分进化算法对可微非对称死区模型参数k
r
、k
l
、α
r
、α
l
、λ进行辨识,所识别出的参数即为步骤3中滑模控制率的未知不可微齿隙轴转矩扰动项参数。
10.本发明的特点还在于,
11.步骤1的具体过程为:
12.在d
‑
q坐标系下,电磁转矩t
e
表达式如下公式(1)所示:
13.t
e
=1.5n
p
(ψ
d
i
q
‑
ψ
q
i
d
)=1.5n
p
[ψ
f
i
q
+(l
d
‑
l
q
)i
d
i
q
]
ꢀꢀꢀꢀꢀꢀꢀ
(1);
[0014]
其中,i
d
为d轴定子电流分量;i
q
为q轴定子电流分量;l
d
为d轴定子电感分量;l
q
为q轴的定子电感分量;ψ
f
为转子永磁体磁链;n
p
为永磁同步电机极对数;ψ
d
为d轴磁链;ψ
q
为q轴磁链。
[0015]
步骤2中双惯量伺服传动系统动力学数学模型如下公式(2)所示:
[0016][0017]
其中,j
m
为驱动侧惯量;b
m
为驱动侧摩擦阻尼;j
l
为从动侧惯量;b
l
为从动侧摩擦阻尼;k
s
为传动轴的弹性系数;b
s
为摩擦阻尼;ω
m
驱动侧转速;ω
l
为从动侧转速;θ
m
为驱动侧位置;θ
l
为从动侧位置;为驱动侧位置微分;为从动侧位置微分;t
s
[θ]为轴转矩;t
l
为负载转矩。
[0018]
步骤3中滑模控制率如下公式(3)所示:
[0019][0020]
其中,s为滑模面;c为大于0的常数;ε为滑模增益;k为大于0的常数;为转速给定微分;为q轴电流给定;为驱动侧转速反馈;sign()为符号函数,为轴转矩的微分。
[0021]
步骤4的具体过程为:
[0022]
步骤4.1,建立如下公式(4)所示的非对称可微死区模型:
[0023][0024]
其中,θ=θ
m
‑
θ
l
;λ为大于0的软度系数;k
r
为正半轴死区斜率;k
l
为负半轴死区斜率;α
r
为正半轴死区角;α
l
为负半轴死区角;
[0025]
步骤4.2,采用差分进化算法对非对称可微死区模型参数k
r
、k
l
、α
r
、α
l
、λ参数进行辨识,具体为:
[0026]
首先建立种群并对种群进行初始化,假定np为种群规模大小,选取待辨识变量个数为n维向量参数x
ij
,i=1,2,
…
,np;j=1,2,
…
,n,x
i
=[x
i1
,x
i2
,
…
,x
in
],即得出x
i,j
的表达式如下所示:
[0027]
x
i,j
=x
i,jmin
+rand(0,1)*(x
i,jmax
‑
x
i,jmin
)
ꢀꢀꢀꢀ
(5);
[0028]
其中,x
i,jmax
和x
i,jmin
分别为个体向量的上限值和下限值;x
i
表示种群中第0代的第i条“染色体”或个体;x
i,j
表示种群中第0代的第i条“染色体”或个体的第j个“基因”;rand(0,1)表示在(0,1)区间均匀分布的随机数;
[0029]
步骤4.3,产生差分向量,进行变异操作,求得变异个体如下公式(6)所示:
[0030][0031]
其中,r1、r2、r3∈{1,2,
…
,np},且r1、r2、r3和i不能相同;f为变异因子,f∈[0,1];表示变异个体中第k+1代第i条“染色体”的第j个“基因”变异个体;表示个体中第k代第r1条“染色体”的第j个“基因”个体;表示个体中第k代第r2条“染色体”的第j个“基因”个体;表示个体中第k代第r3条“染色体”的第j个“基因”个体;
[0032]
步骤4.4,进行交叉操作,得到试验向量交叉操作的具体表达式如下:
[0033][0034]
其中,η为大于0小于1的任意数;c
r
为交叉因子,c
r
取值范围为[0,1];q
j
∈{1,2
…
,n}的随机整数;表示试验个体中第k+1代第i条“染色体”的第j个“基因”试验个体;
[0035]
步骤4.5中,进行选择操作,产生k+1代个体如下公式(8)所示:
[0036][0037]
其中,f为目标函数如下所示:
[0038][0039]
其中,e1(t)为t时刻位置误差;t
posi_r
‑
index
为位置上升时间指标;t
speed_r
‑
index
为转速上升时间指标;δn
index
为转速误差指标;t
re
‑
index
为加载后转速恢复时间指标;t
posi_r
为系统位置上升时间;t
speed_r
为系统转速上升时间;δn为系统转速误差;t
re
为加载后系统转速恢复时间;
[0040]
将选择出的个体即辨识出的未知参数代入非对称可微死区模型中,系统对应位置误差e1(t)、转速误差δn、位置上升时间t
posi_r
、系统转速上升时间t
speed_r
这些响应带入目标函数f中,经过若干次迭代后使得目标函数f达到最小,此时的个体为最优个体,所识别出的参数k
r
、k
l
、α
r
、α
l
、λ即为步骤3中滑模控制率的未知不可微齿隙轴转矩扰动项参数。
[0041]
本发明的有益效果是,本发明提出的一种双惯量伺服系统的自适应齿隙振荡抑制方法,解决了齿隙引起的机械振荡和冲击振荡;即使在齿隙发生变化时,仍可以准确辨识出齿隙模型,在控制器中及时进行补偿齿隙产生的轴转矩扰动,从而消除齿隙振荡,提高系统稳定性、鲁棒性和定位精度。
附图说明
[0042]
图1是本发明一种双惯量伺服系统的自适应齿隙振荡抑制方法的流程框图;
[0043]
图2是本发明一种双惯量伺服系统的自适应齿隙振荡抑制方法的流程框图;
具体实施方式
[0044]
下面结合附图和具体实施方式对本发明进行详细说明。
[0045]
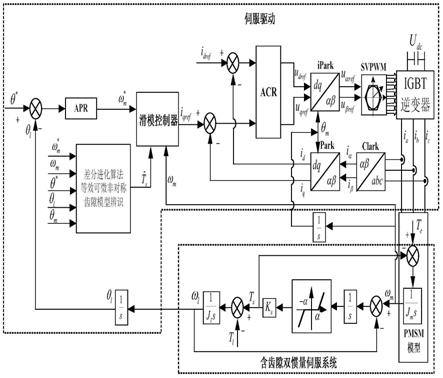
本发明一种双惯量伺服系统的自适应齿隙振荡抑制方法,如图1所示,含齿隙双惯量伺服控制系统包括位置、速度环、电流环三环控制。相电流i
a
、i
b
、i
c
由电流传感器测得后经clarke变换得到两相静止坐标系下的定子电流分量i
α
、i
β
再经park变换得到两相旋转坐标系下的定子电流分量i
d
、i
q
。位置脉冲给定θ
*
由上位机给定,θ
*
与从动侧编码器侧得位置θ
l
做差输入到位置调节器,位置调节器的输出作为速度给定驱动侧转子速度ω
m
由增量式编码器测得,ω
m
与速度给定做差输入到滑模控制器中,滑模控制器的输出作为交轴电流指令值i
q*
,直轴电流指令值i
d*
=0,i
d
、i
q
分别与i
d*
和i
q*
做差后经电流调节器输出u
d
、u
q
再经park反变换输出u
α
、u
β
,最后通过空间矢量脉宽调制模块输出六路pwm信号供给逆变器工作,逆变器将直流母线电压u
dc
以pwm波的形式施加到永磁同步电机上,实现从动侧的定位。
[0046]
具体包括如下步骤:
[0047]
步骤1,在d
‑
q坐标系下,建立永磁同步电机数学模型,得到电磁转矩表达式;步骤1的具体过程为:
[0048]
在d
‑
q坐标系下,永磁同步电机的数学模型:
[0049][0050]
其中,u
d
、u
q
分别为定子电压的d轴分量、定子电压的q轴分量;ψ
d
、ψ
q
分别为定子磁链的d轴分量、定子磁链的q轴分量;i
d
为d轴定子电流分量,i
q
为q轴定子电流分量;r
s
为定子电阻;θ
m
为驱动侧位置。
[0051]
磁链方程为:
[0052][0053]
永磁同步电机输入功率p为:
[0054][0055]
将式(1)、式(2)带入式(3)中可得电磁转矩做功为:
[0056][0057]
将式(2)带入式(4),得电磁转矩表达式为:
[0058]
t
e
=1.5n
p
[ψ
f
i
q
+(l
d
‑
l
q
)i
d
i
q
]
ꢀꢀꢀꢀꢀꢀ
(5);
[0059]
其中,i
d
为d轴定子电流分量;i
q
为q轴定子电流分量;l
d
为d轴定子电感分量;l
q
为q的定子电感分量;ψ
f
为转子永磁体磁链;n
p
为永磁同步电机极对数。
[0060]
步骤2,以转速和位置为状态变量建立双惯量伺服传动系统动力学数学模型;
[0061]
步骤2中双惯量伺服传动系统动力学数学模型如下公式(6)所示:
[0062][0063]
其中,j
m
为驱动侧惯量;b
m
为驱动侧摩擦阻尼;j
l
为从动侧惯量;b
l
为从动侧摩擦阻尼;k
s
为传动轴的弹性系数;b
s
为摩擦阻尼;ω
m
驱动侧转速;ω
l
为从动侧转速;θ
m
为驱动侧位置;θ
l
为从动侧位置;为驱动侧位置微分;为从动侧位置微分;t
s
[θ]为轴转矩;t
l
为负载转矩。
[0064]
步骤3,转速环采用滑模控制方法,基于步骤2得到的双惯量系统动力学的数学模型和步骤1电磁转矩表达式,设计滑模控制器的滑模控制率;
[0065]
建立滑模面s为:
[0066][0067]
其中,其中,为驱动侧转速给定;c为大于0的常数。
[0068]
滑模控制器采用指数趋近律为:
[0069][0070]
其中,ε为滑模增益;k为大于0的常数;sign()为符号函数。
[0071]
忽略摩擦系数,给式(7)求导结合式(6)带入式(8)中可得滑模控制器输出表达式为:
[0072][0073]
其中,s为滑模面;c为大于0的常数;ε为滑模增益;k为大于0的常数;为转速给定微分;为q轴电流给定;为驱动侧转速反馈;sign()为符号函数,为轴转矩的微分。
[0074]
步骤4,对步骤3中滑模控制率的未知不可微齿隙轴转矩扰动项建立等效可微非对称死区模型,并在控制器中精确补偿齿隙所产生的未知扰动。由于系统死区参数为未知部分,因此需要对模型参数进行寻优。根据得到的等效可微非对称死区模型,采用差分进化算法对等效可微非对称死区模型的参数k
r
、k
l
、α
r
、α
l
、λ进行辨识,根据伺服系统实时响应,反复通过差分进化算法优化等效非对称可微死区模型参数使得目标函数值越来越小,直至系统静动态性能满足设定指标。优化有限代数后,最终系统达到指标要求,此时的k
r
、k
l
、α
r
、α
l
、λ作为最合适的等效非对称可微死区模型参数,其过程如图2。
[0075]
步骤4.1中,针对步骤3滑模控制率未知不可微齿隙轴转矩扰动项,本发明提出一
种非对称可微死区模型,由于非对称可微死区模型参数未知,因此本发明采用差分进化算法对所提出的非对称可微死区模型参数k
r
、k
l
、α
r
、α
l
、λ进行辨识,非对称可微死区模型如下公式:
[0076][0077]
其中,θ=θ
m
‑
θ
l
;λ为软度系数大于0;k
r
为正半轴死区斜率;k
l
为负半轴死区斜率;α
r
为正半轴死区角;α
l
为负半轴死区角。
[0078]
步骤4.2中,采用差分进化算法对非对称可微死区模型参数k
r
、k
l
、α
r
、α
l
、λ参数进行辨识,首先建立种群并对种群进行初始化,假定np为其种群规模大小,选取待辨识变量个数为n维向量参数x
ij
(i=1,2,
…
,np;j=1,2,
…
,n),x
i
=[x
i1
,x
i2
,
…
,x
in
],即可算出x
i,j
的表达式如下所示:
[0079]
x
i,j
=x
i,jmin
+rand(0,1)*(x
i,jmax
‑
x
i,jmin
)
ꢀꢀꢀꢀꢀꢀꢀ
(11);
[0080]
其中,x
i,jmax
和x
i,jmin
分别为个体向量的上限值和下限值;x
i
表示种群中第0代的第i条“染色体”(或个体);x
i,j
表示种群中第0代的第i条“染色体”(或个体)的第j个“基因”;rand(0,1)表示在(0,1)区间均匀分布的随机数。
[0081]
步骤4.3中,产生差分向量,进行变异操作,求得变异个体如下所示:
[0082][0083]
其中,r1,r2,r3∈{1,2,
…
,np},且和i不能相同;f为变异因子,f∈[0,1];表示变异个体中第k+1代第i条“染色体”的第j个“基因”变异个体;表示个体中第k代第r1条“染色体”的第j个“基因”个体;表示个体中第k代第r2条“染色体”的第j个“基因”个体;表示个体中第k代第r3条“染色体”的第j个“基因”个体。
[0084]
步骤4.4中,进行交叉操作,得到试验向量交叉操作的具体表达式如下:
[0085][0086]
其中,η
j
为大于0小于1的任意数;c
r
为交叉因子,取值范围为[0,1];q
j
∈{1,2
…
,n}的随机整数;表示试验个体中第k+1代第i条“染色体”的第j个“基因”试验个体。
[0087]
步骤4.5中,进行选择操作,产生k+1代个体如下所示:
[0088][0089]
其中,f为目标函数如下所示:
[0090]
[0091]
其中,e1(t)为t时刻位置误差;t
posi_r
‑
index
为位置上升时间指标;t
speed_r
‑
index
为转速上升时间指标;δn
index
为转速误差指标;t
re
‑
index
为加载后转速恢复时间指标;t
posi_r
为系统位置上升时间;t
speed_r
为系统转速上升时间;δn为系统转速误差;t
re
为加载后系统转速恢复时间。
[0092]
将选择出的个体即辨识出的未知参数代入非对称可微死区模型中,系统对应位置误差e1(t)、转速误差δn、位置上升时间t
posi_r
、系统转速上升时间t
speed_r
等响应带入目标函数f中,经过多次迭代后使得目标函数f达到最小,此时的模型越接近系统模型,个体为最有个体,即k
r
、k
l
、α
r
、α
l
、λ最佳参数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1