电机空载短时自停控制电路的制作方法
[0001]
本实用新型是一种电机空载短时自停控制电路,属于电机节能控制技术领域。
背景技术:
[0002]
电机的主要作用是产生驱动转矩,作为用电器或各种机械的动力源,很多电机在使用时经常会出现以下问题:只要电机一开机就一直通电转个不停,而在实际使用过程中,电机不可能全部时间都处于满负荷工作,而这种连续运转会使得电机的利用率只有60%-80%,造成大量的电能浪费。
技术实现要素:
[0003]
针对上述现有技术存在的问题,本实用新型提供一种电机空载短时自停控制电路,可以控制电机在空载时短时间停转,节约电能。
[0004]
为了实现上述目的,本实用新型提供一种电机空载短时自停控制电路,包括电阻r1~r3、电解电容c1~c2、电容c3、电解电容c4、电容c5、二极管d1、稳压二极管dw1、电位器rp1、三极管bg1、双向晶闸管scr1、电流互感器hg、电机m、变压器b1、整流堆ur1、三端稳压集成电路ic1、运算放大器ic2、8脚时基集成电路ic3;
[0005]
火线l、零线n分别连接变压器b1输入端口的两端,变压器b1的输出端口的两端分别连接整流堆ur1的1脚、2脚,整流堆ur1的3脚分别连接电解电容c1的正极、三端稳压集成电路ic1的1脚,三端稳压集成电路ic1的3脚分别连接电解电容c2的正极、电阻r2的一端、运算放大器ic2的8脚、电位器rp1的第一固定端、电位器rp1的滑动端、8脚时基集成电路ic3的8脚、8脚时基集成电路ic3的4脚、电阻r3的一端,整流堆ur1的4脚、电解电容c1的负极、三端稳压集成电路ic1的2脚、电解电容c2的负极均接地;
[0006]
电机m与双向晶闸管scr1的第一阳极t1、第二阳极t2串联后并接在火线l、零线n之间,电流互感器hg用来检测电机m两端的电流,电流互感器hg的一端连接二极管d1的正极,二极管d1的负极分别连接电阻r1的一端、电容c3的一端、运算放大器ic2的3脚,运算放大器ic2的2脚分别连接电阻r2的另一端、稳压二极管dw1的负极,运算放大器ic2的1脚连接8脚时基集成电路ic3的2脚,8脚时基集成电路ic3的6脚分别连接电位器rp1的第二固定端、8脚时基集成电路ic3的7脚、电解电容c4的正极,8脚时基集成电路ic3的5脚连接电容c5的一端,8脚时基集成电路ic3的3脚连接三极管bg1的基极,三极管bg1的集电极分别连接电阻r3的另一端、双向晶闸管scr1的门极g,电流互感器hg的另一端、电阻r1的另一端、电容c3的另一端、稳压二极管dw1的正极、运算放大器ic2的4脚、电解电容c4的负极、8脚时基集成电路ic3的1脚、电容c5的另一端、三极管bg1的发射极均接地。
[0007]
作为本实用新型的进一步改进,三端稳压集成电路ic1的型号为7805,运算放大器ic2的型号为lm358,8脚时基集成电路ic3的型号为ne555。
[0008]
作为本实用新型的进一步改进,三极管bg1为npn管型,型号为9013。
[0009]
作为本实用新型的进一步改进,二极管d1的型号为in4007。
[0010]
作为本实用新型的进一步改进,双向晶闸管scr1的型号为bt136。
[0011]
作为本实用新型的进一步改进,继电器j1为直流继电器,其型号为jrx-20f。
[0012]
与现有技术相比,本实用新型包括电阻r1~r3、电解电容c1~c2、电容c3、电解电容c4、电容c5、二极管d1、稳压二极管dw1、电位器rp1、三极管bg1、双向晶闸管scr1、电流互感器hg、电机m、变压器b1、整流堆ur1、三端稳压集成电路ic1、运算放大器ic2、8脚时基集成电路ic3,当电机m空载运行时,电流互感器hg感应到的电流值变小,运算放大器ic2的1脚输出低电平,8脚时基集成电路ic3的2脚接收一个负脉冲,8脚时基集成电路ic3的3脚输出高电平,三极管bg1导通,三极管bg1导通使得双向晶闸管scr1的门极g为低电平而截止,电机m停止供电,实现空载不耗电;经过一段时间后,8脚时基集成电路ic3定时结束,8脚时基集成电路ic3的3脚输出低电平,三极管bg1截止,双向晶闸管scr1的门极g为高电平而导通,电机m重新工作;本实用新型可以控制电机m在空载时短时间停转,节约电能。
附图说明
[0013]
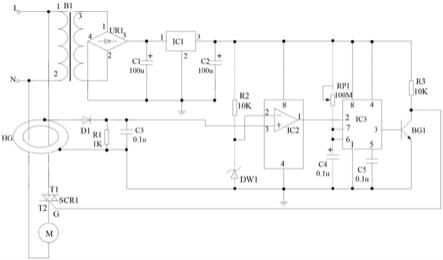
图1是本实用新型的电路原理图。
具体实施方式
[0014]
下面结合附图对本实用新型作进一步说明。
[0015]
如图1所示,一种电机空载短时自停控制电路,包括电阻r1~r3、电解电容c1~c2、电容c3、电解电容c4、电容c5、二极管d1、稳压二极管dw1、电位器rp1、三极管bg1、双向晶闸管scr1、电流互感器hg、电机m、变压器b1、整流堆ur1、三端稳压集成电路ic1、运算放大器ic2、8脚时基集成电路ic3;三端稳压集成电路ic1的型号为7805,运算放大器ic2的型号为lm358,8脚时基集成电路ic3的型号为ne555;三极管bg1为npn管型,型号为9013;二极管d1的型号为in4007;双向晶闸管scr1的型号为bt136;继电器j1为直流继电器,其型号为jrx-20f。
[0016]
火线l、零线n分别连接变压器b1输入端口的两端,变压器b1的输出端口的两端分别连接整流堆ur1的1脚、2脚,整流堆ur1的3脚分别连接电解电容c1的正极、三端稳压集成电路ic1的1脚,三端稳压集成电路ic1的3脚分别连接电解电容c2的正极、电阻r2的一端、运算放大器ic2的8脚、电位器rp1的第一固定端、电位器rp1的滑动端、8脚时基集成电路ic3的8脚、8脚时基集成电路ic3的4脚、电阻r3的一端,整流堆ur1的4脚、电解电容c1的负极、三端稳压集成电路ic1的2脚、电解电容c2的负极均接地;
[0017]
电机m与双向晶闸管scr1的第一阳极t1、第二阳极t2串联后并接在火线l、零线n之间,电流互感器hg用来检测电机m两端的电流,电流互感器hg的一端连接二极管d1的正极,二极管d1的负极分别连接电阻r1的一端、电容c3的一端、运算放大器ic2的3脚,运算放大器ic2的2脚分别连接电阻r2的另一端、稳压二极管dw1的负极,运算放大器ic2的1脚连接8脚时基集成电路ic3的2脚,8脚时基集成电路ic3的6脚分别连接电位器rp1的第二固定端、8脚时基集成电路ic3的7脚、电解电容c4的正极,8脚时基集成电路ic3的5脚连接电容c5的一端,8脚时基集成电路ic3的3脚连接三极管bg1的基极,三极管bg1的集电极分别连接电阻r3的另一端、双向晶闸管scr1的门极g,电流互感器hg的另一端、电阻r1的另一端、电容c3的另一端、稳压二极管dw1的正极、运算放大器ic2的4脚、电解电容c4的负极、8脚时基集成电路
ic3的1脚、电容c5的另一端、三极管bg1的发射极均接地。
[0018]
图1中这些元件的阻值均是公知常识,本领域技术人员可以根据需要对各个元件的参数进行调整。
[0019]
本实用新型的工作原理如下:如图1所示,当电机m正常带载运行时,电流互感器hg感应到的电流值较大,送至运算放大器ic2的3脚,与运算放大器ic2的2脚基准电压进行比较,由于运算放大器ic2的3脚电压大于2脚电压,运算放大器ic2的1脚输出高电平,8脚时基集成电路ic3的3脚输出低电平,三极管bg1截止,双向晶闸管scr1的门极g为高电平而导通,电机m正常工作;如果此时电机m空载运行时,电流互感器hg感应到的电流值变小,运算放大器ic2的3脚电压小于2脚电压,运算放大器ic2的1脚输出低电平,8脚时基集成电路ic3的2脚接收一个负脉冲,8脚时基集成电路ic3的3脚输出高电平,三极管bg1导通,三极管bg1导通使得双向晶闸管scr1的门极g为低电平而截止,电机m停止供电,实现空载不耗电;经过一段时间后,8脚时基集成电路ic3定时结束,8脚时基集成电路ic3的3脚输出低电平,三极管bg1截止,双向晶闸管scr1的门极g为高电平而导通,电机m重新工作(一般来说,电机m有一分钟左右的惯性运转,此时再启动电机m,启动电流不会很大,对电机m无太大的影响)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1