具有用于车辆的充电站的充电基础设施的制作方法
具有用于车辆的充电站的充电基础设施
1.本发明涉及一种给车辆充电的充电站,尤其是对如客车等电动车辆进行充电的充电站。
2.必须通过将电动汽车与电池充电器连接来对电动汽车频繁地充电。近年来,已经进行了许多尝试来将连接的建立自动化,例如:通过在车辆底部或车顶实施充电连接器,该充电连接器可以通过遥控臂上的电触点接合。
3.已知解决方案的缺点是:所应用的特定充电连接器需要根据当地立法获得批准的特定基础设施,由此不能被各种车辆或国家使用。
4.本发明的目的是提供一种充电站,其中可以自动实现与标准化车辆侧充电接口的充电连接。
5.根据第一方面,本发明提供了一种充电基础设施,包括用于对具有车辆侧充电接口的车辆进行充电的充电站,其中充电站包括机器人,该机器人携带用于与车辆侧充电接口建立充电连接的机器人侧充电接口,其中机器人包括基架、携带机器人侧充电接口的可移动托架、以及至少三个位于基架和可移动托架之间的位移组件,这些位移组件形成用于使可移动托架相对于基架以至少三个自由度移动的机构,其中位移组件包括致动器,该致动器被配置为在位移行程上施加基座和可移动托架之间的位移,或者在位移角度上施加可移动托架相对于基架的旋转。其中,机器人包括与致动器串联的至少一个顺应性组件以及机器人侧充电接口,机器人侧充电接口被配置为在顺应性行程上弹性地吸收或释放致动器和机器人侧充电接口之间的位移,或者用于在位移角度上弹性地吸收或释放可移动托架相对于基架的旋转,其中顺应性行程的长度至少为5毫米,或其中顺应性旋转的角度至少为1度,即+/
‑
0.5度。
6.根据本发明的充电基础设施包括具有机器人的充电站,机器人具有由位移组件形成的机构以便以至少三个自由度将机器人充电接口移动到车辆侧充电接口。一个或多个顺应性组件允许吸收致动器的位移行程的一部分。这使得机器人侧充电接口能够以受控方式符合规定地移动,即使在这些充电接口没有正确对准的情况下,能够有助于充电接口的正确接合。这允许将充电接口实施为现有的合法获批的连接器。
7.在一个实施例中,机器人包括六个位移组件,六个位移组件在基架和可移动托架之间形成六脚机构,以六个自由度移动可移动托架。
8.在一个实施例中,每个位移组件包括与致动器串联的顺应性组件,由此可以以由致动器提供的同一自由度来提供顺应性。
9.在一个实施例中,机器人包括机器人侧充电接口和可移动托架之间的顺应性组件。
10.在一个实施例中,充电站包括与致动器和机器人侧充电接口串联的多个顺应性组件,其中这些顺应性组件具有相互不同的机械阻抗,其弹性地吸收或释放致动器和机器人侧充电接口之间的位移。例如,机械阻抗是弹簧刚度。例如,不同的机械阻抗可以用来补偿机器人中存在的各种部件的不同个体重量导致的不均匀重量分布。
11.在一个实施例中,位移组件在一侧经由第一联轴器与基架连接,并且其中位移组
件在相对侧经由第二联轴器与可移动托架连接,其中致动器是与顺应性组件串联的直线运动致动器。这些位移组件可以在基架和可移动托架之间形成细长的腿。
12.在其一个实施例中,第一联轴器和/或第二联轴器是万向节。
13.在一个实施例中,顺应性行程的长度至少是位移行程的1%。
14.在一个实施例中,顺应性行程的长度至少是位移行程的5%。
15.在一个实施例中,顺应性行程的长度至少是位移行程的10%。
16.在一个实施例中,顺应性行程的长度最大是位移行程的50%。
17.在一个实施例中,顺应性行程的长度最大是位移行程的100%。
18.在一个实施例中,顺应性组件偏置到致动器和机器人侧充电接口之间的限定位置。
19.在一个实施例中,顺应性组件被配置为在超过致动器和机器人侧充电接口之间的阈值载荷之后弹性地吸收顺应性行程上的位移。这些特征允许根据每个位移组件中致动器的位置确定基架和可移动托架之间的距离。由此可以确定机器人侧充电接口的空间位置。
20.在一个实施例中,机器人侧充电接口和车辆侧充电接口设置有作为安全设施的锁定设施,用以锁定和解锁所建立的充电连接。
21.在一个实施例中,充电站包括不同类型的机器人侧充电接口,用于与不同类型的车辆侧充电接口建立充电连接,从而可以在同一充电站中对具有不同车辆侧充电接口的不同车辆进行充电。
22.在一个实施例中,充电站包括用于控制充电站操作的电子控制系统。
23.在一个实施例中,电子控制系统包括与致动器连接的电子控制器,其中电子控制器被配置为控制致动器的位移。
24.在其实施例中,电子控制系统包括与电子控制器连接的第一传感器,用于确定致动器的位置或移动。
25.在其实施例中,第一传感器附接到致动器。
26.在一个实施例中,电子控制系统包括与电子控制器连接的成像检测器,其中电子控制器被配置为确定车辆侧充电接口在充电站中的空间位置,并且相应地控制致动器的位移,以使机器人侧充电接口朝着车辆侧充电接口移动以建立充电连接。
27.在一个实施例中,电子控制器被配置为检测顺应性组件的顺应性行程,并且响应于检测到顺应性行程来控制致动器的位移。通过该控制特征,例如:可以激活致动器以将机器人侧充电接口以暂时较高的力推向车辆侧充电接口,以建立正确的充电连接。
28.在一个实施例中,电子控制器被配置为基于位移行程和顺应性行程来确定机器人侧充电接口的冲突。冲突可能是与人的碰撞,其中电子控制系统可以通过收回所有致动器来作出响应。
29.在一个实施例中,电子控制器被配置为基于位移行程和顺应性行程来确定机器人侧充电接口和车辆侧充电接口之间的物理接触。
30.在一个实施例中,电子控制器被配置为基于位移行程和顺应性行程来确定机器人侧充电接口和车辆侧充电接口之间的未对准。
31.在一个实施例中,电子控制器被配置为控制致动器的位移,以便至少部分校正机器人侧充电接口和车辆侧充电接口之间的未对准。
32.在一个实施例中,电子控制系统包括与电子控制器连接的第二传感器,用于确定顺应性行程或用于确定作用在顺应性组件上的力或载荷。
33.在一个实施例中,第二传感器附接到顺应性组件。
34.在一个实施例中,电子控制系统包括位于可移动托架和机器人侧充电接口之间的第三传感器,第三传感器与电子控制器连接,用于确定作用在机器人侧充电接口和可移动托架之间的力或载荷。
35.在一个实施例中,充电基础设施包括远离充电站的计算机服务器,计算机服务器与电子控制系统连接,用于配置或远程控制电子控制器。
36.根据第二方面,本发明提供了一种用于在充电基础设施的充电站中对具有车辆侧充电接口的车辆进行充电的方法,其中充电站包括机器人,机器人携带用于与车辆侧充电接口建立充电连接的机器人侧充电接口,其中机器人包括基架、携带机器人侧充电接口的可移动托架、以及基架和可移动托架之间的至少三个位移组件,位移组件形成用于使可移动托架相对于基架以至少三个自由度移动的机构,其中位移组件包括致动器,致动器被配置为在位移行程上施加基座和可移动托架之间的位移,其中机器人包括与致动器和机器人侧充电接口串联的至少一个顺应性组件,机器人侧充电接口被配置为在顺应性行程上弹性地吸收或释放致动器和机器人侧充电接口之间的位移,其中在该方法中,一个或多个线性致动器在位移行程上施加基架和可移动托架之间的位移,以将机器人侧充电接口朝车辆侧充电接口移动,并且其中一个或多个顺应性组件在顺应性行程上弹性地吸收或释放致动器和机器人侧充电接口之间的位移。
37.在一个实施例中,顺应性行程的长度至少是1毫米。
38.在一个实施例中,顺应性行程的长度最大是位移行程的100%。
39.在一个实施例中,顺应性组件被配置为在超过致动器和机器人侧充电接口之间的阈值载荷之后弹性地吸收顺应性行程上的位移,其中在该方法中,可移动托架跟随由致动器施加的位移,直到超过阈值载荷,由此进行顺应性行程。
40.在一个实施例中,充电站包括用于控制充电站运行的电子控制系统,其中电子控制系统包括与致动器连接的电子控制器,其中在该方法中,电子控制器控制致动器的位移。
41.在一个实施例中,电子控制系统包括与电子控制器连接的成像检测器,其中在该方法中,电子控制器借助图像检测器确定车辆侧充电接口在充电站中的空间位置,并且电子控制器相应地控制线性致动器的位移,以使机器人侧充电接口朝向车辆侧充电接口移动以建立充电连接。
42.在一个实施例中,电子控制器检测顺应性组件的顺应性行程,并且响应于检测到顺应性行程来控制线性致动器的位移。
43.在一个实施例中,电子控制器基于位移行程和顺应性行程来确定机器人侧充电接口的冲突。
44.在一个实施例中,电子控制器基于位移行程和顺应性行程来确定机器人侧充电接口和车辆侧充电接口之间的物理接触。
45.在一个实施例中,电子控制器基于位移行程和顺应性行程来确定机器人侧充电接口和车辆侧充电接口之间的未对准。
46.在一个实施例中,电子控制器控制线性致动器的位移,以便至少部分校正机器人
侧充电接口和车辆侧充电接口之间的未对准。
47.根据第三方面,本发明提供了一种具有计算机可执行指令的计算机可读介质,计算机可执行指令适于使充电基础设施执行根据本发明的方法。
48.说明书中描述和示出的各个方面和特征可以在任何可能的情况下单独应用。这些单独的方面,特别是所附从属权利要求中描述的方面和特征,可以成为分案专利申请的主题。
49.本发明将根据附图中所示的示例性实施例来说明,其中:
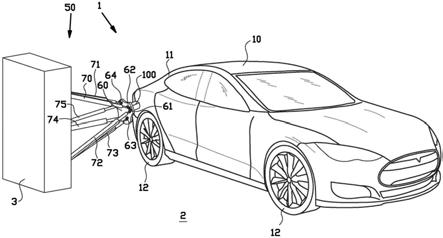
50.图1是根据本发明的实施例的具有机器人的充电站的等距侧视图,该充电站具有已与电动车辆的车辆侧充电接口建立了充电连接的机器人侧充电接口;
51.图2a和图2b是图1的充电站的等距侧视图和细节,其中机器人恰好在建立充电连接之前的位置;
52.图3是如图1、图2a和图2b所示的机器人的等距前视图;
53.图4是机器人在其一条腿处的横截面;
54.图5a是恰好在建立充电连接之前正确对准的机器人侧充电接口和车辆侧充电接口的局部横截面;
55.图5b是已经正确建立充电连接的机器人侧充电接口和车辆侧充电接口的局部横截面;
56.图5c和5d是在机器人的控制下校正允许的未对准期间机器人侧充电接口和车辆侧充电接口的局部横截面;以及
57.图6示出了操作的方案。
58.图1、图2a和图2b示出了车辆区域2的充电站1,用于对电动车辆10(在本示例中为客车)进行电充电。车辆10可以是全电动的,或者可以具有混合动力驱动,其中电驱动与燃料燃烧相结合。车辆10具有车轮12上的车体11和由车体11携带的车辆侧充电接口20,在本示例中,车辆侧充电接口20位于车体11的右侧,在一个后轮12的上方。
59.车辆侧充电接口20的特定引出线可以是任何已知类型,例如:所谓的mennekes、yazaki、schuko或combo类型。如图2b和图5a所示,在本示例中,车辆侧充电接口20是接受普通充电和高速充电两者的combo ccs
‑
2入口。车辆侧充电接口20包括向内并入圆周内表面22的前表面21。内表面22并入底面23,第一插座24和第二插座31从底面23突出。第一插座24包括电绝缘材料的插座主体25,插座主体25具有五个第一通道26和两个第二通道28,五个埋入式正常充电连接器27在第一通道中延伸,两个控制连接器29在第二通道中延伸。第二插座31包括电绝缘材料的插座主体31,插座主体31具有两个第三通道32,两个高速充电连接器33在第三通道中延伸。内表面21和插座主体26一起围绕插座24、31形成槽30。槽30、第一通道26、第二通道28和第三通道32具有平行于第一通道26、第二通道28和第三通道32的接收方向r。
60.如图3所示,充电站1包括机器人50,机器人50具有机器人侧充电接口100,用于与车辆侧充电接口20建立充电连接。机器人侧充电接口100与未示出的电池充电器电连接。机器人50包括示意性地示出的主基座51,在本示例中,主基座51由靠近车辆侧充电接口20一侧的车辆区域2旁边的控制台3支撑。根据车辆侧充电接口20的位置,机器人50可以位于车辆10的任何一侧,或者位于车辆10的前侧或后侧。可替代地,机器人50位于地板上或地板下
方以到达车辆10底部的车辆侧充电接口20,或者机器人50悬挂在车辆10上方以到达车辆10顶部或车顶上的车辆侧充电接口20。
61.主基座51包括主框架52以及主框架52上的两个第一腿支撑件53、两个第二腿支撑件54和两个第三腿支撑件55,它们在同一平面中,并且成对配置成三角形结构。
62.如图2b和图3所示,机器人50包括可移动托架60,可移动托架60具有底架61以及底架61上的两个第一腿支撑件62、两个第二腿支撑件63和两个第三腿支撑件64,这些支撑件在同一平面中并且成对配置形成三角形结构,其中这些对之间的距离小于主基座51的成对腿支撑件53
‑
55之间的距离。载体60携带机器人侧充电接口100。
63.如图2b、图3和图5a所示,在本示例中,机器人侧充电接口100是用于正常充电的所谓mennekes型(根据iec 62196的类型2连接器)。机器人侧充电接口包括与车辆侧充电接口20的槽30配合并安装在槽30内部的罩(shield)101,以及与车辆侧充电接口20的相应第一通道26和第二通道28配合并安装在第一通道26和第二通道28内部的多个第一衬套102和第二衬套103。机器人侧充电接口100包括埋入衬套102、103内并与车辆侧充电接口20的连接器27、29电连接的充电连接器。罩101、第一衬套102和第二衬套103具有与其平行的插入方向p。插入方向p在默认情况下与车辆侧充电接口20的接收方向r完全平行并对准。
64.车辆侧充电接口20和机器人侧充电接口100通常具有非常精确的配合几何形状,其在初始相互接触时仅允许与接收方向r垂直的最大约3毫米的微小未对准,或者当手动插入彼此时仅允许最大10度的微小未对准。由于充电接口20、100的自搜索形状特征,这种未对准被自动校正,由此充电接口20、100进入正确的相互接合。车辆侧充电接口20的连接器27、29、33和机器人侧充电接口的连接器可以在插入方向p和接收方向r具有不同的长度或位置,以便即使在它们未对准时也在配套连接器之间施加默认接触顺序。这确保了,例如:在进行电源连接之前建立接地连接或控制连接。
65.在本示例中,机器人50在主基座51和可移动托架60之间总共包括实现为六条腿71
‑
76的六个位移组件,六条腿71
‑
76在主基座51的腿支撑件53
‑
55和可移动托架60的腿支撑件62
‑
64之间延伸以在主基座51和可移动托架60之间形成六脚机构70。腿71
‑
76在结构上是相同的,并且在下文中通过参考第二腿72来详细描述。其细节也在图4中示出。
66.第二腿72包括具有外管81的直线运动致动器80,外管81在其底端经由实现为万向节的第一联轴器88连接到主基座51的腿支撑件53
‑
55。在本示例中,直线运动致动器80具有安装到外管81上的电动机83。直线运动致动器80具有驱动杆82,驱动杆82在外管81内被直线引导并且部分地从外管81突出。驱动杆82例如经由主轴与电动机83可操作地连接。因此,通过相应地给电动机83供电,驱动杆82可以在位移行程上相对于第一联轴器88在方向a上往复直线移动。直线运动致动器80具有用于测量驱动杆82相对于外管81的位置的内部第一传感器,如主轴上的旋转传感器或旋转计数器。因此,每个腿71
‑
76都具有这样的第一传感器。
67.第二腿72包括与直线运动致动器80串联的顺应性组件90。在本示例中,顺应性组件90包括安装到直线运动致动器80的驱动杆82末端的外管91,以及在本例中借助滑动轴承93在外管91内被直线引导的连杆92。连杆92部分地从外管91突出,并且顺应性组件90包括连杆92端部处的端部止动件94以及可逆柔性元件,端部止动件94保持在滑动轴承93后面以确定连杆92相对于驱动杆82的限定的最外位置,并且在本示例中,可逆柔性元件为弹簧,特
别是位于端部制动件94和驱动杆82之间的螺旋弹簧95,其被偏置以保持端部止动件94与滑动轴承93抵接。借助螺旋弹簧95,当超过克服偏置的限定阈值力时,连杆92可以在顺应性行程上沿方向b朝向驱动杆82弹性地往回滑动。连杆92在其远端经由实现为万向节的第二联接器89连接到可移动托架60的腿支撑件61
‑
63。
68.顺应性行程的长度最小为1毫米,最大为驱动杆82的位移行程的最大长度的100%。
69.在所述实施例中,顺应性组件90偏置并抵靠在端部止动件94上。可替代地,螺旋弹簧95或任何其他弹性元件在实施或不实施阈值力的情况下提供反方向的弹性,由此连杆92可以弹性地被推向驱动杆82和从驱动杆82拉出。各条腿71
‑
76中的螺旋弹簧95可以具有不同的阻抗,在本例中为不同的刚度,以确保机器人侧充电接口100的默认位置,而不会由于例如机器人50中存在的各种部件的不同个体重量引起的重量分布不均匀而下垂。
70.在本示例中,六条腿71
‑
76在主基座51和可移动托架60之间形成六脚机构70。可替代地制定,六条腿71
‑
76形成斯图尔特平台。只要没有超过顺应性组件90上的阈值力,直线运动致动器80就在第一联轴器88和第二联轴器89之间施加位移,第一联轴器88和第二联轴器89后面紧跟着可移动托架60。因此,可移动托架60可以在三个正交方向x、y、z(横向、纵向和垂直)上平移,并围绕这些轴旋转(俯仰、滚动、偏航),总共六个自由度(6
‑
dof)。当超过阈值力时,第一联接器88和第二联接器89之间施加的位移的一部分可以被顺应性组件90可逆地吸收。
71.顺应性组件90具有用于测量连杆92相对于驱动杆82的位置的内部第二传感器96,如距离传感器、压力传感器或力传感器,用于测量连杆92施加在驱动杆82上的压力。因此,每条腿71
‑
76具有这样的第二传感器96,由此可以获得与利用第一传感器获得的可移动托架60的实际位置处的可移动托架60和驱动杆75之间的顺应性相关的顺应性数据。这种顺应性包括在三个正交方向x、y、z(横向、纵向和垂直)上的平移和围绕这些轴的旋转(俯仰、侧滚、偏航),总共六个自由度(6
‑
dof)。作为其替代或补充,可移动托架60包括在底架61和机器人侧充电接口100之间的第三传感器66,如压力传感器矩阵,用于获得或得到上述六个自由度的顺应性数据。
72.充电站1包括用于控制充电站1的操作的电子控制系统。控制系统包括一个或多个成像检测器130(如摄像机或用于形成立体相机的多个相机),或者距离传感器(如基于lidar、雷达或led的传感器),用于检测充电站1中的车辆的车辆侧充电接口20的位置。因此,成像检测器130形成视觉系统的一部分。成像检测器130可以安装在基座上,如图所示安装在控制台3上,或由机器人50携带,如图所示安装在底架61上。控制系统包括电子控制器,电子控制器与电动机83连接以驱动电动机的旋转。电子控制器与检测器130连接,并与线性致动器80的第一传感器和顺应性组件90的第二传感器96连接,和/或与底架61和机器人侧充电接口100之间的第三传感器66连接。
73.充电站形成具有远程计算机服务器的充电基础设施的一部分,远程计算机服务器用于与电子控制器通信并用于配置电子控制器。电子控制器装有由电子控制器的处理器执行的软件,由此充电站1执行图6中示意性地指示的以下操作。说明从腿71
‑
76的完全缩回的驱动杆82开始,由此机器人侧充电接口100从处于待机位置的车辆区域2退出,以允许车辆10进入充电站1。
74.在第一步骤310中,借助成像检测器130或者通过任何其他适当的传感器,或者通过车辆10和充电站1之间的任何类型的数据通信,或者通过任何类型的远程触发系统,或者通过车辆10的驾驶员的登记,或者通过在充电站1的现场的人工操作员,来通知特定车辆10存在于车辆区域2处。
75.当通知存在车辆10时,则在第二步骤320中,通过成像传感器130确定充电站1中的车辆侧充电接口20的空间位置和方位。这包括三个正交方向x、y、z上的位置以及围绕这些轴的任何旋转方向。
76.在第三步骤330中,确定机器人侧充电接口100的对应特定初始空间位置和方位,其中机器人侧充电接口100可以在方向r上正确地插入车辆侧充电接口20中,如图5a所示。
77.在第四步骤340中,对电动机83单独供电,同时利用第一传感器控制驱动杆82在方向a上的各个位置,以使机器人侧充电接口100处于特定的初始空间位置和方位。在第四步骤340中,借助第二传感器96监测连杆92相对于驱动杆82的各个位置或作用在连杆92和驱动杆82之间的任何力。作为其替代地或补充,这可以利用第三传感器66来确定。利用成像检测器130形成的视觉系统监测移动。当连杆92中的任何一个朝向同一条腿71
‑
76的驱动杆75移动时,假设发生了意外的物理接触,例如:与外物(例如人、车辆或任何其他环境)的碰撞。然后,在第五步骤350中,电动机83停止或反转以缩回机器人侧充电接口100。
78.当没有发生碰撞时,则在第四步骤340之后的第六步骤360中,在用第一传感器控制驱动杆82在方向a上的位置的同时为电动机83供电,以将机器人侧充电接口100推入车辆侧充电接口20。在第六步骤360中,借助第二传感器96监测连杆92相对于驱动杆75的位置,或者借助第三传感器66确定连杆92相对于驱动杆75的位置,以执行三个功能:
79.第一个功能是确定机器人侧充电接口100相对于车辆侧充电接口20的正确的最终接合位置,如图5b所示。通过在插入方向p上施加推力来获得最终接合。该推力经由偏置螺旋弹簧95从主基座51传递到可移动托架60。螺旋弹簧95可以在超过其定义的阈值力时被推入,这通过第二传感器96或第三传感器66来监测。在第一个功能中,腿71
‑
76中的这种顺应性至少部分地通过相应地给电动机83供电来补偿,以便能够达到机器人侧充电接口100相对于车辆侧充电接口20的正确最终接合位置。正确的最终接合可以由连接到机器人侧充电接口100的电池充电器来确认。
80.第二个功能是确定机器人侧充电接口100和车辆侧充电接口20之间的意外物理接触。
81.第三个功能是确定机器人侧充电接口100相对于车辆侧充电接口20(例如图5c中所示)的可接受的未对准,这是由于预期或意外的第一物理接触200造成的。第一物理接触200迫使机器人侧充电接口100相对于车辆侧充电接口20倾斜或滑动,同时推力经由偏置的螺旋弹簧95从主基座51传递到可移动托架60。螺旋弹簧95可以在超过其定义的阈值力时被推入,这通过第二传感器96或第三传感器66来监测。由各个螺旋弹簧95提供的顺应性可以通过它们的自搜索形状特征诱导机器人侧充电接口100沿着车辆侧充电接口20在方向v上滑动,和/或基于第二传感器96或第三传感器66的信号来确定电动机83的校正激活。在图5c中,图示的未对准包含在同一平面上的平移和旋转。明显的是,所有六个自由度中的任何未对准都可能发生,并且可以通过电动机83的对应校正动作来检测和校正。重复这一过程,直到到达机器人侧充电接口100相对于车辆侧充电接口20的正确最终接合位置。在该迭代中,
可以通过沿w方向诱导滑动来检测和校正如图5d所示的进一步物理接触201。电子控制系统可以,例如:经由电池充电器来监测与机器人侧充电接口的连接器的电连接,以例如通过确定接触序列或通过检测与默认接触序列的任何偏差来确定未对准。
82.在第七步骤370中,锁定接合的机器人侧充电接口100和车辆侧充电接口20以防止脱离,并且通过正确接合的充电接口20、100对车辆2充电。
83.充电之后,在第八步骤380中,通过缩回腿71
‑
76的驱动杆82,将充电接口20、100解锁,并且机器人侧充电接口100与车辆侧充电接口20脱离。驱动杆82完全缩回以将机器人侧充电接口100缩回到所述待机位置。
84.由并行顺应性组件90提供的特定顺应性具有以下优点:
85.首先,当机器人侧充电接口100相对于车辆侧充电接口20移动到其初始空间位置时,顺应性使得能够安全地检测到任何预期或意外的物理接触,例如:与人的碰撞。当撞到机器人侧充电接口100时,顺应性提供了柔软性或灵活性。
86.其次,顺应性允许在已经达到初始空间位置和方位之后检测机器人侧充电接口100和车辆侧充电接口20之间的任何未对准。未对准是从检测到的物理接触得到的。顺应性有助于利用机器人侧充电接口100和车辆侧接口20的自搜索形状特征快速获得正确的最终接合位置。顺应性使物理接触本身更安全,因为所提供的弹性或顺应性阻止了破坏峰值力。
87.第三,顺应性促进机器人侧充电接口100从车辆侧充电接口20脱离,特别是当车辆10的位置在充电过程中改变时。
88.第四,顺应性吸收由直线运动致动器80或由车辆10的小幅运动施加的任何刚性运动。这些小幅运动可以例如由步入或走出车辆2的乘客引起,或由作用于车辆2的风引起。
89.因此,顺应性组件90在可移动托架60的六个自由度的移动中提供触觉反馈,并因此提供来自车辆侧充电接口100的触觉反馈。该触觉反馈从第三传感器66或第二传感器96得到,并且由电子控制器用来控制直线运动致动器80。视觉系统提供视觉反馈。
90.应当理解,包括上述描述是为了说明优选实施例的操作,而不是为了限制本发明的范围。从上面的讨论可以看出,还可能被本发明的范围涵盖的许多变化对本领域技术人员是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1