指令生成装置及指令生成方法与流程
1.本发明涉及一种生成直流电源装置的功率转换装置的控制指令的指令生成装置及指令生成方法。
2.本技术主张2019年8月9日于日本技术的日本专利申请2019-148070号的优先权,并将其内容援用于此。
背景技术:
3.专利文献1中公开有通过使逆变器具有同步发电机的调速器及avr(autom atic voltage regulator:自动电压调节器)的功能来实现系统稳定化的技术。根据专利文献1中所记载的技术,将母线假定成无穷大母线来对控制逻辑进行模型化。无穷大母线是指,即使在与母线连接的负载中产生较大的负载变动,也不会产生频率及电压的变动的理想电源。
4.以往技术文献
5.专利文献
6.专利文献1:日本专利第6084863号公报
技术实现要素:
7.发明要解决的技术课题
8.在通过独立运行供给电力的所谓的微电网系统或离网系统中,因与母线连接的负载的变动而母线的电力容易变动。因此,在专利文献1中所记载的技术中,存在因母线的电力供需的变动而无法稳定地控制功率转换装置的可能性。并且,为了使母线的电力供需的关系稳定,不仅需要功率转换装置向母线的电力供给,还需要对来自母线的功率损耗进行适当地控制。
9.本发明的目的在于提供一种能够稳定地控制与母线连接的功率转换装置的指令生成装置及指令生成方法。
10.用于解决技术课题的手段
11.根据第1方式,指令生成装置生成将直流电源装置所输出的直流功率转换为交流功率并供给至母线,并且将母线的交流功率转换为直流功率并供给至直流电源装置的功率转换装置的控制指令,所述指令生成装置具备:虚拟发电计算部,模拟虚拟发电机的驱动,并根据计算所述虚拟发电机的转速的转子模型,计算所述虚拟发电机的有效电压值及相位;母线计算部,计算所述功率转换装置与所述母线的连接点上的电压及相位;相位差角计算部,计算所述虚拟发电机的相位与所述连接点的相位的相位差角;目标功率确定部,根据所述虚拟发电机的有效电压值、所述连接点上的电压及所述相位差角,确定所述功率转换装置的有效功率的目标值;及指令生成部,根据所确定的所述有效功率的目标值,生成所述功率转换装置的控制指令。
12.根据第2方式,指令生成方法生成将直流电源装置所输出的直流功率转换为交流功率并供给至母线,并且将母线的交流功率转换为直流功率并供给至直流电源装置的功率
转换装置的控制指令,所述指令生成方法具备如下步骤:模拟虚拟发电机的驱动,并根据计算所述虚拟发电机的转速的转子模型,计算所述虚拟发电机的有效电压值及相位的步骤;测量所述功率转换装置与所述母线的连接点上的电压及相位的步骤;计算所述虚拟发电机的相位与所述连接点的相位的相位差角的步骤;根据所述虚拟发电机的有效电压值、所述连接点上的电压及所述相位差角,确定所述功率转换装置的有效功率的目标值的步骤;及根据所确定的所述有效功率的目标值,生成所述功率转换装置的控制指令的步骤。
13.发明效果
14.根据上述方式中的至少一个方式,能够稳定地控制与母线连接的功率转换装置。
附图说明
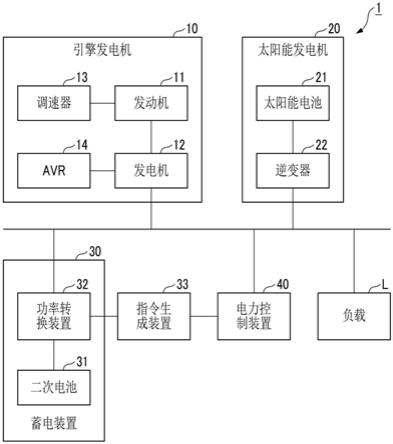
15.图1是表示第1实施方式所涉及的电力供给系统的结构的概略框图。
16.图2是表示第1实施方式所涉及的指令生成装置的结构的概略框图。
17.图3是表示第1实施方式所涉及的调速器模型的例子的线框图。
18.图4是表示第1实施方式所涉及的转子模型的例子的线框图。
19.图5是表示第2实施方式所涉及的指令生成装置的结构的概略框图。
20.图6是表示第3实施方式所涉及的指令生成装置的结构的概略框图。
21.图7是表示至少一个实施方式所涉及的计算机的结构的概略框图。
具体实施方式
22.[第1实施方式]
[0023]
图1是表示第1实施方式所涉及的电力供给系统的结构的概略框图。
[0024]
(电力供给系统的结构)
[0025]
第1实施方式所涉及的电力供给系统1具备引擎发电机10、太阳能发电机20、蓄电装置30、指令生成装置33及电力控制装置40。电力供给系统1通过独立运行对负载l供给电力。即,电力供给系统1为所谓的微电网系统或离网系统。引擎发电机10、太阳能发电机20及蓄电装置30与母线连接,并且经由母线对负载l供给电力。
[0026]
引擎发电机10具备发动机11、发电机12、调速器13及avr14(automatic voltage regulator:自动电压调节器)。引擎发电机10为通过发动机11的旋转来驱动发电机12,由此产生交流功率的交流发电机。
[0027]
调速器13根据hz-kw下垂特性控制发动机11的转速。引擎发电机10的调速器特性例如由连结额定输出及额定频率所涉及的图表与从零输出及额定输出切断了负载时以无负载状态来进行整定的整定频率所涉及的图表的一次函数的斜率来表示。即,hz-kw下垂特性为频率越增加输出越减少的特性。另外,在其他实施方式中,调速器特性可以通过pid(proportional integral diffe rential:比例积分微分)控制来实现。avr14根据v-kbar下垂特性控制供给至发电机12的励磁线圈的电流,由此调整发电机12的端子电压。v-kbar下垂特性为电压越增加无效功率越减少的特性。另外,在其他实施方式中,也可以代替引擎发电机10而使用其他交流发电机。
[0028]
太阳能发电机20具备太阳能电池21及逆变器22。太阳能电池21为将太阳能转换为直流功率的直流电源装置。逆变器22将太阳能电池21所生成的直流功率转换为交流功率。
另外,逆变器22与太阳能电池21无需一定要一对一设置。例如,也可以在一个逆变器22中连接多个太阳能电池21。另外,在其他实施方式中,代替太阳能发电机20,例如也可以使用风力发电机等其他可再生能源发电机。
[0029]
蓄电装置30具备作为直流电源装置的二次电池31及功率转换装置32。功率转换装置32的控制指令包含有效功率的目标值及无效功率的目标值。功率转换装置32根据来自指令生成装置33的指令,将二次电池31所输出的直流功率转换为与母线的电压频率同步的交流功率并供给至母线。功率转换装置32通过pll控制使输出功率与母线的电压频率同步。并且,功率转换装置32根据指令生成装置33根据来自电力控制装置40的指令而生成的控制指令,将流过母线的交流功率的一部分转换为直流功率来对二次电池31进行充电。作为二次电池31,例如能够使用锂离子二次电池。功率转换装置32为根据p-q控制所涉及的控制指令进行动作的通用的电流控制型逆变器。另外,其他实施方式所涉及的功率转换装置32也可以根据视在功率的目标值、功率因数角的目标值及电压频率的目标值相关的控制指令进行动作。
[0030]
另外,功率转换装置32与二次电池31无需一定要一对一设置。例如,可以在一个功率转换装置32中连接多个二次电池31。
[0031]
指令生成装置33根据来自电力控制装置40的指令生成用于控制蓄电装置30的功率转换装置32的控制指令,并输出至蓄电装置30。指令生成装置33为与蓄电装置30另行设置的装置。
[0032]
电力控制装置40监视母线的功率值,并且对引擎发电机10及蓄电装置30输出充放电指令。例如,当如白天等由太阳能发电机20产生的发电功率为规定的阈值以上时,电力控制装置40输出降低基于引擎发电机10的发电功率或停止发电的功率指令。并且,当如夜间或恶劣天气时等由太阳能发电机20产生的发电功率小于规定的阈值时,电力控制装置40对引擎发电机10输出增加发电功率的功率指令。
[0033]
并且,例如,电力控制装置40根据由太阳能发电机20产生的发电功率的变动,将用于对该变动进行平滑化的充放电指令输出至蓄电装置30。并且,电力控制装置40比较母线的功率值与负载l所需的功率值,并根据功率差,将充放电指令输出至蓄电装置30。
[0034]
(指令生成装置的结构)
[0035]
图2是表示第1实施方式所涉及的指令生成装置的结构的概略框图。
[0036]
第1实施方式所涉及的指令生成装置33具备电压表331及计算机332。电压表331测量功率转换装置32与母线的连接点的电压。计算机332根据电压表331的测量值生成控制指令。
[0037]
计算机332具备指令接收部3321、测量值获取部3322、模型存储部3323、驱动转矩计算部3324、虚拟发电计算部3325、母线计算部3326、相位差角计算部3327、目标功率确定部3328及指令生成部3329。
[0038]
指令接收部3321从电力控制装置40接收充放电指令。充放电指令包含有效功率的指令值及无效功率的指令值。
[0039]
测量值获取部3322获取电压表331的测量值。即,测量值获取部3322获取连接点上的瞬时电压值。
[0040]
模型存储部3323存储模拟虚拟发电机的行为的数理模型。具体而言,模型存储部
3323存储模拟虚拟发电机的调速器的行为的调速器模型m1及模拟虚拟发电机的转子的行为的转子模型m2。调速器模型m1通过输入虚拟发电机的转子的角速度及角速度指令值,输出虚拟发电机的驱动转矩值。转子模型m2通过输入虚拟发电机的电转矩值及驱动转矩值,输出虚拟发电机的转子的角速度及相位角。关于各数理模型的详细内容,将在后面叙述。
[0041]
驱动转矩计算部3324通过将目标功率确定部3328所确定的有效功率的目标值以及在上次控制中虚拟发电计算部3325计算出的虚拟发电机的转子的角速度输入于调速器模型m1,计算虚拟发电机的驱动转矩值。虚拟发电计算部3325通过将驱动转矩计算部3324计算出的驱动转矩值输入于转子模型m2,计算虚拟发电机的转子的角速度及相位角。并且,虚拟发电计算部3325根据转子的相位及测量值获取部3322所获取的电压表331的测量值,计算虚拟发电机的有效电压值。例如,关于母线的瞬时电压值,测量值获取部3322通过pll(phase lock loop:锁相环)电路进行转子的频率下的采样,并对所采样的数据进行频率转换,由此计算转子的频率成分的有效电压值。
[0042]
母线计算部3326根据测量值获取部3322所获取的电压表331的测量值,计算连接点上的有效电压值及相位。例如,关于母线的瞬时电压值,母线计算部3326通过pll电路进行与连接点上的基波频率同步的采样,并对所采样的数据进行频率转换,由此计算基波成分的有效电压值。并且,例如,母线计算部3326根据与基波频率同步的采样计算连接点的相位。
[0043]
相位差角计算部3327计算母线计算部3326计算出的母线的相位与虚拟发电计算部3325计算出的虚拟发电机的转子的相位之差即相位差角。
[0044]
目标功率确定部3328根据虚拟发电计算部3325计算出的虚拟发电机的有效电压值、母线计算部3326计算出的母线的有效电压值及相位差角计算部3327计算出的相位差角,确定有效功率的目标值。具体而言,目标功率确定部3328根据以下式(1)确定有效功率的目标值。
[0045]
p
vsg
=v
grid
×vvsg
÷
x
×
sinδθ
……
(1)
[0046]
其中,p
vsg
表示有效功率的目标值。v
grid
表示母线的有效电压值。v
vsg
表示虚拟发电机的有效电压值。x表示虚拟发电机与母线之间的串联电抗。作为x的值,例如能够使用作为虚拟发电机的电抗来设定的值的2倍的值。另外,串联电抗x为至少大于虚拟发电机的电抗的值。δθ表示母线与虚拟发电机的相位差角。另外,式(1)为以对母线串联连接有串联电抗x及虚拟发电机的等效电路为基础的式。另外,在其他实施方式中,目标功率确定部3328也可以通过解开母线及虚拟发电机连接的二端对网络的y参数来确定有效功率的目标值。另外,式(1)与将二端对网络的等效电路即π型电路的导纳设为0的式等效。
[0047]
指令生成部3329根据目标功率确定部3328所确定的有效功率的目标值及指令接收部从电力控制装置40接收的充放电指令,生成功率转换装置32的控制指令。指令生成部3329将所生成的控制指令输出至功率转换装置32。
[0048]
(数理模型的结构)
[0049]
图3是表示第1实施方式所涉及的调速器模型的例子的线框图。
[0050]
调速器模型m1通过输入有效功率的测量值p、有效功率指令值p
*
、虚拟发电机的转子的角速度ωr及角速度的目标值ω
*
,输出虚拟发电机的驱动转矩值td。具体而言,调速器模型m1具备相加点m21、m22、m23、p块m24、pi块m25及一阶滞后块m26。相加点m21获得有效功
率的测量值p与有效功率指令值p
*
之差。p块m24对相加点m21的输出进行基于比例增益kb1的p控制。比例增益kb1相当于虚拟发电机的hz-kw下垂增益。相加点m22获得虚拟发电机的转子的角速度ωr与角速度的目标值ω
*
之差。相加点m23获得相加点m22的输出与p块m24的输出之和。pi块m25对相加点m23的输出进行基于比例增益kb2及积分增益kb3的pi控制。一阶滞后块m26对pi块m25的输出进行与时间常数kb4相关的的一阶滞后控制,并获得驱动转矩值td。
[0051]
图4是表示第1实施方式所涉及的转子模型的例子的线框图。
[0052]
转子模型m2通过输入虚拟发电机的负载转矩值te及驱动转矩值td,输出虚拟发电机的转子的角速度ωr及相位角θr。具体而言,转子模型m2具备相加点m31、一阶滞后块m32及i块m33。相加点m31获得虚拟发电机的负载转矩值te与驱动转矩值td之差。一阶滞后块m32对相加点m31的输出进行一阶滞后增益1/d及与时间常数m/d相关的一阶滞后响应计算,并获得转子的角速度ωr。i块m33通过对转子的角速度ωr进行积分并乘以比例增益ω
base
,获得虚拟发电机的转子的相位角θr。比例增益ω
base
为母线的基准频率。
[0053]
(动作)
[0054]
根据上述结构,计算机332根据调速器模型m1及转子模型m2,由有效功率指令值及角速度指令值求出虚拟发电机的相位及角速度。并且,计算机332由电压表331的测量值求出母线的有效电压值及相位以及虚拟发电机的有效电压值。计算机332求出虚拟发电机的相位与母线的相位之差即相位差角。计算机332根据母线的有效电压值、虚拟发电机的有效电压值及相位差角确定有效功率的目标值,并根据有效功率的目标值生成功率转换装置32的控制指令。功率转换装置32通过按照指令生成装置33所生成的控制指令进行动作,实现相当于虚拟发电机的特性。
[0055]
(作用
·
效果)
[0056]
第1实施方式所涉及的指令生成装置33由连接点上的瞬时电压值的测量值求出母线的有效电压值及相位,根据虚拟发电机的有效电压值、连接点上的电压及相位差角,确定功率转换装置32的有效功率的目标值。由此,指令生成装置33通过根据母线的频率及电压的变动控制功率转换装置32,能够实现功率转换装置32的稳定的控制。
[0057]
[第2实施方式]
[0058]
根据第1实施方式所涉及的指令生成装置33,能够使虚拟发电机的频率与母线频率同步。若虚拟发电机的频率与母线频率同步,则以保持同步时间点下的相位差角的状态进行功率转换装置32的控制。即,成为相位差角偏移的状态。另一方面,相位差角越接近0,同步稳定度越高,相位差角的绝对值越接近π(180度),同步稳定度越低。尤其为了稳定地运用系统,优选将相位差角的绝对值设为π/2(90度)以内。因此,第2实施方式所涉及的指令生成装置33使相位差角接近0,并且使虚拟发电机的频率与母线频率同步。
[0059]
图5是表示第2实施方式所涉及的指令生成装置的结构的概略框图。
[0060]
第2实施方式所涉及的指令生成装置除了第1实施方式的结构以外,还具备相位差角减小部3330。
[0061]
相位差角减小部3330通过将相位差角计算部3327计算出的相位差角设为输入的pi控制,计算抵消相位差角的校正转速,并对指令接收部3321所接收的角速度指令值相加校正转速,由此校正角速度指令值。驱动转矩计算部3324根据已校正的角速度指令值计算
integrated circuit:大规模集成电路)。作为pld的例子,可举出pal(programmable array logic:可编程阵列逻辑)、gal(generic array logic:通用阵列逻辑)、cpld(complex programmable logic device:复杂可编程逻辑器件)及fpga(现场可编程门阵列)。在该情况下,通过处理器91实现的功能的一部分或全部可以由该集成电路实现。这种集成电路也包含于处理器的一个示例中。
[0077]
作为存储器93的例子,可举出hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态硬盘)、磁盘、光磁盘,cd-rom(compact disc read only memory:只读光盘)、dvd-rom(digital versatile disc read only memory:高密度只读光盘)及半导体存储器等。存储器93可以是与计算机332的总线直接连接的内部介质,也可以是经由接口94或通信线路与计算机332连接的外部介质。并且,当该程序通过通信线路传送至计算机332时,接收了传送的计算机332也可以将该程序展开于主存储器92,并执行上述处理。在至少一个实施方式中,存储器93为非暂时性的有形的储存介质。
[0078]
并且,该程序也可以是用于实现前述功能的一部分的程序。而且,该程序也可以是通过将前述的功能与已存储于存储器93的其他程序的组合来实现的所谓的差分文件(差分程序)。
[0079]
[附记]
[0080]
各实施方式中所记载的指令生成装置及指令生成方法例如能够以如下方式掌握。
[0081]
(1)根据第1方式,指令生成装置33生成将直流电源装置31所输出的直流功率转换为交流功率并供给至母线,并且将母线的交流功率转换为直流功率并供给至直流电源装置的功率转换装置32的控制指令,所述指令生成装置33具备:虚拟发电计算部3325,模拟虚拟发电机的驱动,并根据计算所述虚拟发电机的转速的转子模型m2,计算所述虚拟发电机的有效电压值及相位;母线计算部3326,计算所述功率转换装置32与所述母线的连接点上的电压及相位;相位差角计算部3327,计算所述虚拟发电机的相位与所述连接点的相位的相位差角;目标功率确定部3328,根据所述虚拟发电机的有效电压值、所述连接点上的电压及所述相位差角,确定所述功率转换装置的有效功率的目标值;及指令生成部3329,根据所确定的所述有效功率的目标值,生成所述功率转换装置32的控制指令。
[0082]
由此,指令生成装置33通过根据母线的频率及电压的变动控制功率转换装置32,能够实现功率转换装置32的稳定的控制。
[0083]
(2)根据第2方式,在第1方式所涉及的指令生成装置33中,可以是如下,即,所述目标功率确定部3328通过所述虚拟发电机的有效电压值、所述连接点上的电压及所述相位差角的正弦的乘积除以比所述虚拟发电机的电抗大的规定的串联电抗,确定所述功率转换装置32的有效功率的目标值。
[0084]
(3)根据第3方式,可以是如下,即,第1或第2方式所涉及的指令生成装置33具备:指令接收部3321,接收虚拟发电机的角速度指令值;及相位差角减小部3330,以使所述相位差角接近零的方式校正所述角速度指令值,所述虚拟发电计算部3325根据所述转子模型m2及已校正的所述角速度指令值,计算所述虚拟发电机的有效电压值及相位。
[0085]
由此,指令生成装置33能够使相位差角接近零,并且使虚拟发电机的频率与母线频率同步。
[0086]
(4)根据第4方式,可以是如下,即,第1至第3中任一方式所涉及的指令生成装置33
具备将计算出的所述相位差角限制在-π/2至+π/2的范围内的值的限制器3301,所述目标功率确定部3328根据所限制的所述相位差角,确定所述功率转换装置32的有效功率的目标值。
[0087]
由此,指令生成装置33能够将相位差角始终保持在稳定区域内。
[0088]
(5)根据第5方式,在第1至第4中任一方式所涉及的指令生成装置中,可以是如下,即,目标功率确定部3328根据所述虚拟发电机的有效电压值、所述连接点上的电压及所述相位差角,还确定所述功率转换装置32的无效功率的目标值。
[0089]
由此,指令生成装置33能够对功率转换装置32供给与相位差角相对应的无效功率,从而能够提高系统的电压稳定性。
[0090]
(6)根据第6方式,指令生成方法生成将直流电源装置所输出的直流功率转换为交流功率并供给至母线,并且将母线的交流功率转换为直流功率并供给至直流电源装置的功率转换装置的控制指令,所述指令生成方法具备:模拟虚拟发电机的驱动,并根据计算所述虚拟发电机的转速的转子模型,计算所述虚拟发电机的有效电压值及相位的步骤;测量所述功率转换装置与所述母线的连接点上的电压及相位的步骤;计算所述虚拟发电机的相位与所述连接点的相位的相位差角的步骤;根据所述虚拟发电机的有效电压值、所述连接点上的电压及所述相位差角,确定所述功率转换装置的有效功率的目标值的步骤;及根据所确定的所述有效功率的目标值,生成所述功率转换装置的控制指令的步骤。
[0091]
由此,通过根据母线的频率及电压的变动控制功率转换装置32,能够实现功率转换装置32的稳定的控制。
[0092]
符号说明
[0093]
1-电力供给系统,10-引擎发电机,11-发动机,12-发电机,13-调速器,14-avr,20-太阳能发电机,21-太阳能电池,22-逆变器,30-蓄电装置,31-二次电池(直流电源装置),32-功率转换装置,33-指令生成装置,40-电力控制装置,331-电压表,332-计算机,3321-指令接收部,3322-测量值获取部,3323-模型存储部,3324-驱动转矩计算部,3325-虚拟发电计算部,3326-母线计算部,3327-相位差角计算部,3328-目标功率确定部,3329-指令生成部,3330-相位差角减小部,3301-限制器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1