用于电网互联的多端口电网形成控制的制作方法
用于电网互联的多端口电网形成控制
1.本公开涉及用于电网形成矢量电流控制——具体地用于电网互联(grid intertie)的多端口电网形成控制——的系统和方法。
2.传输和分配电网的改变速率传统上是高的。用同步发电机的常规发电越来越多地由转换器连接的可再生能量资源代替。在许多研究中已经表明,如果公用电网配备有未采用任何电网支持控制策略的大量可再生能量资源,则存在电网不稳定的风险。不稳定的原因在于这样的资源不会根据电网中的实际功率需求来使它们的功率注入适配于电网。
3.这种与电网无关的电流/功率控制策略长期以来在大多数转换器连接的应用中是常见的。然而,在过去的几十年中,已经施行了更严格的法规,例如对于光伏(pv)逆变器。当今,如果电网频率增加到标称以上,pv逆变器必须逐渐地减小注入的有功功率。此行为是进入电网支持功率转换器控制的方向的第一步。响应于电网的实际需要而缓慢地适配注入的有功功率。这样的简单方法仅提供稳态电网支持,即它仍然依赖于电网中应对瞬态荷载变化的同步发电机。
4.同时,已经开发了用于孤立电网、微电网和轨道电网的更精密的转换器控制方法。这些控制方法旨在不仅提供稳态电网支持,而且提供瞬态电网支持。用这样的控制方法的转换器连接的能量资源能够完全代替电网中的常规同步发电机。可以在没有任何常规同步发电机连接到电网的情况下运行该电网——这在例如轨道电网中已经是常见的情形。
5.为了提供全电网支持,有必要根据连接到电网的各种荷载的需求来改变注入到电网的功率的量。这是通过将与电网无关的、恒定功率注入的行为改变为更接近电压源的行为来实现的。配备有这样的控制方法的转换器自动地适配和共享注入的功率,使得它们提供电网中的各种荷载所需求的实际功率。
6.因为与ac发电和配电中的遗留装备的向后兼容的原因,控制方法旨在向电网提供“惯性”,意味着电网频率的改变速率被限制。
7.电压源特性和惯性的组合效应导致非常接近同步发电机的行为的特性。这样的控制方法提供了全电网支持,并且可以完全代替电网中的同步发电机。
8.通常,根据现有技术的控制机制可以分为两个主要的组。
9.在下垂控制方法(droop control approach)中,控制规律是基于电感电网中频率(或角度)和功率流的稳态耦合。存在各种实施方式变型方案,并且在过去几年中已经提出了改进该方法的若干种方式。在大多数实施方式变型方案中,该方法创建电压基准,该电压基准必须用附加的级联电压和电流控制回路来跟踪。在这方面,参考文献[1]和[3]。
[0010]
在例如[2]中所描述的虚拟发电机方法中,控制规律是基于仿真同步发电机的行为的原理。描述该发电机的行为的数学模型直接在控制器中实施。存在主要在细节的水平和实施的方程的复杂性方面不同的各种实施方式变型方案。
[0011]
为了仿真虚拟发电机或虚拟同步机(vsm),在控制器中实施同步发电机的数学方程以仿真发电机的行为。在直接方法(电压源类型)中,针对被给定为直接对调制级或对随后的级联电压和电流控制回路的基准的定子电压求解机器方程。在逆方法(电流源类型)中,针对被给定为对随后的电流控制回路的基准的定子电流求解机器方程。
[0012]
然而,上文引用的两种方法都需要各种附加的控制回路,以使概念可适用。具体地,由直接方法给出的级联电压和电流控制回路提供包括电流限制的电流控制。
[0013]
电流控制回路和pll跟踪由逆方法给出的有功功率/无功功率基准,并且提供包括电流限制的电流控制。此外,提供了电网同步和电网频率测量。
[0014]
虚拟阻抗回路可以仿真虚拟定子阻抗。
[0015]
可以使用附加的部件来提高虚拟发电机的性能。所述附加的部件可以是以下中的至少一个:
[0016]
用于在闭合转换器的主断路器(mcb)之前或在故障情况期间与电网同步的直接方法的附加的pll、用以改进pcc处的电压调节的自动电压调节器(avr)以及用于电网电流和pcc电压以提高pi控制回路的性能的前馈增益。阻尼器绕组仿真被用来改进低频振荡的阻尼。在最简单的逆方法中,用测量的电网频率的导数来仿真虚拟惯性效应。此外,常常需要对虚拟阻抗基准进行低通滤波,以减小由用于计算虚拟电感的导数所引起的高频噪声的放大。
[0017]
然而,根据先进的系统可能难以调谐并且需要高调试工作量(commissioning effort)。由于具有较低切换频率的转换器中的不充分的带宽分离,在控制回路之间还可能存在交互。在普通的系统中,由于未知交互而通常必须调谐大约15个参数。在强电网中,常常发生不充分的基准跟踪性能。此外,可能出现故障期间的同步丢失。
[0018]
如刚刚已经讨论的,电网支持控制方法在各种应用——诸如并网电池能量存储(bess)、微电网、pv逆变器、轨道互联、高压直流(hvdc)和不间断电源(ups)——中变得越来越重要。各个国家的传输系统运营商(tso)正在讨论以这样的方式改变并网能量资源的标准,使得电网支持对于所有并网能量源成为强制性的。当今的电网支持控制方法主要基于两个基本概念——“虚拟发电机”概念和下垂控制概念。这两种方法具有若干个缺点,诸如复杂性高、调试工作量高的困难的调谐方法以及稳定性问题。此外,所提及的方法可以在强电网中和在弱电网中同时提供充足的控制性能,并且因此在孤岛事件(islanding event)期间需要重新调谐或控制模式转变。
[0019]
除了转换器连接的可再生能量源之外,特别是用hvdc线路在长距离上传输大量电力以及不同电网的耦合,例如3相公用电网与1相轨道电网,在现代电力电网中变得越来越重要。常规地,这样的互连器仅用恒定功率控制或用稳态电网支持来控制。最近,提出了使用虚拟同步发电机控制来为hvdc线路或轨道互联提供全电网支持。
[0020]
然而,根据先进的解决方案可以仅在链路的一侧提供全电网支持,即不可以在hvdc链路或电网互联站的两个端子上提供全电网支持,而在两个端子之间的dc链路中没有过多的能量存储。然而,特别是tso将优选在端子的两侧具有全电网支持特性的解决方案。
[0021]
现有的用于hvdc线路和轨道互联的控制方法可以被分类为以下解决方案:
[0022]-两个端子上的严格的电流/功率控制以将一给定量的有功功率/无功功率从一个端子传输到另一个端子。该方法的扩展允许使用电网频率的导数(rocof)来仿真一个端子上的惯性(参考[4])。通常,另一端子被确定为控制dc链路电压,并且不提供任何惯性。
[0023]-端子的一侧的严格的电流/功率控制和另一侧的电网支持控制。电网支持端子可以仅配备有稳态下垂控制,或配备有全虚拟同步发电机控制(参考[6])。具有严格的功率控制的端子被确定为控制dc链路电压。
[0024]-在端子的一侧的严格的电流控制和另一侧的电网形成控制。此模式被用来例如将离岸风电场连接到公用电网。离岸端子仿真提供用于风电场的本地松弛母线(bus)的电压源(参考[5])。具有严格的功率控制的端子被确定为控制dc链路电压。
[0025]-在dc链路中具有过多的能量存储的一个或两个端子上的电网支持控制[7]。
[0026]
图1示出了根据现有技术的电网互联/hvdc链路的示意图的一个示例。在此情况下,dc链路由电容器组表示。根据现有技术,两个端子都使用矢量电流控制(vcc)或等效的电流控制方案来控制,使得两个转换器端子的行为可以用等效的电流源来建模(参见图2)。通过对两个端子上的电流控制给出正确的设定点,可以在链路上传送一定量的功率(p
tr
)。可以在两个端子上独立地注入无功功率。假设同步(dq)参考坐标系中的矢量电流控制,需要在d坐标和q坐标中为电流控制器计算正确的设定点。假设稳态,即每个pll参考坐标系与pcc处的对应的电压对齐,设定点被给出为
[0027][0028][0029][0030][0031]
为了简单起见,dc链路电压控制仅为连接到第一电力电网的第一端子计算基准然而它也可以在第一端子和连接到第二电力电网的第二端子之间被共享。功率传送设定点p
tr
可以是由慢顶层控制器(二级或三级控制,电力交易)计算的量,或它可以附加地含有基于一个端子上的频率测量而由用于稳态电网支持的下垂曲线计算的一部分。使用频率导数(rocof),可以在一个端子上仿真虚拟惯性(参见[4])。考虑两个端子上的电网频率以确定p
tr
的更复杂的功能也是可能的。
[0032]
在其他应用(诸如离岸风电场与电网的连接)中,应用一种不同的先进的控制方法。可以在电网形成模式下控制连接到离岸风电场的端子,即仿真电压源(参见图3)。第二端子和第二电网之间的有功功率和无功功率的交换不被直接控制。标准矢量电流控制被施加在第一端子上,其必须确保第一端子和第二端子之间的功率平衡。然后,用于第一端子的电流控制器的设定点被给出为
[0033][0034][0035][0036]
再次,通过用第一端子控制dc链路电压。
[0037]
在根据现有技术的另一个示例中,一个端子配备有虚拟同步发电机控制(参见图4)。另一个端子用标准矢量电流控制来控制。第二端子上的控制器仿真同步发电机的行为。第二端子和第二电网之间的功率交换由虚拟同步发电机的参数和动态确定。然而,稳态功率交换可以受到进入下垂曲线的功率设定点的影响,该下垂曲线通常被实施以用于虚拟发电机。用于第一端子上的电流控制器的设定点再次被给出为:
[0038][0039][0040][0041]
再次,用第一端子控制dc链路电压。在稳态下,虚拟发电机在第二端子上注入到电网内的有功功率和无功功率通常根据下式遵循下垂曲线
[0042][0043][0044]
有功功率设定点pset,2和无功功率设定点qset,2由慢顶层控制器(二级或三级控制,和/或电力交易)给出。
[0045]
先进的控制方法都不能够在互联/hvdc链路的两个端子上提供全电网支持,而不具有安装在dc链路中的过多的能量存储。
[0046]
本公开的主要构思之一是在hvdc链路/电网互联的两个端子上提供电网支持/电网形成控制。这通过在链路的两侧使用电网形成矢量电流控制(gfvcc)以及双向功率前馈项来实现,该电网形成矢量电流控制(gfvcc)是一种下文将详细讨论的控制方法。
[0047]
该方法不仅限于双端口系统,而且它也可以被扩展到多端口hvdc系统。
[0048]
电网形成矢量电流控制的一个独特特性是它仿真与电流源并联连接的虚拟同步发电机——即旋转轮——的行为。该旋转轮在稳态期间不消耗或提供任何功率,它仅在瞬态期间注入功率并且向系统提供惯性。电流源被并联连接,该电流源充当快速调节器(governor)并且提供应用所需的稳态功率。
[0049]
根据本发明的一个方面,此控制方法被复制并且应用于控制hvdc链路/电网互联的两个端子。由控制器的虚拟发电机部分在第一端子上注入的功率被用来为第二端子的电流源创建功率等效的电流基准。反之亦然,由第二端子的虚拟发电机部分注入的功率被用来创建用于第一端子上的受控电流源的功率等效的电流基准。用此方法,端子的两侧提供虚拟发电机的特性。所需的功率由相对侧的端子上的电网涌出(source)/吸入(sink)。
[0050]
每个端子上的电网支持的量,即惯性响应,可以容易地且独立地用一个因子——从链路的标称功率的0%-100%在gfvcc中引入的k
vsm
因子——进行适配。此缩放的优点之一在于,可以在强电网侧减少电网支持的量,以不过多地干扰弱电网侧。
[0051]
此外,同一因子——k
vsm
——可以被用来将系统改变为严格的电流控制,并且独立
地发生电网故障的情况下,在每个端子上将虚拟发电机效应减小到零。
[0052]
此外,功率流控制器可以为两个电流源创建设定点,以用于有功功率/无功功率通过hvdc链路/电网互联的常规传输。此功率流控制器可以包含用于功率交易和/或使用下垂曲线或类似方法进行稳态电网支持的装置。
[0053]
此外,dc链路电压控制器可以为一个或两个端子上的电流源创建设定点,以控制该链路的dc链路电压。
[0054]
本公开涉及一种用于控制电网互联的电网形成矢量电流控制系统。所述系统包括第一端子,所述第一端子被配置为连接到第一电力电网,所述第一端子包括第一电流控制单元、第一虚拟导纳单元和第一锁相环pll单元,其中所述第一虚拟导纳单元和所述第一pll单元被配置为仿真第一虚拟同步机vsm的惯性,并且第一虚拟电流源并联连接到所述第一vsm。所述系统包括第二端子,所述第二端子被配置为连接到第二电力电网,所述第二端子包括第二电流控制单元、第二虚拟导纳单元和第二pll单元,其中所述第二虚拟导纳单元和所述第二pll单元被配置为仿真第二虚拟同步机vsm的惯性,并且第二虚拟电流源并联连接到所述第二vsm。所述系统包括控制器,所述控制器被配置为:使用由所述第一vsm消耗的瞬态功率p
vsm1
来生成功率等效的电流基准以控制所述第二虚拟电流源,以及使用由所述第二vsm消耗的瞬态功率p
vsm2
来生成功率等效的电流基准以控制所述第一虚拟电流源。
[0055]
多个实施方案可以优选地实施以下特征:
[0056]
优选地,所述第一端子包括第一下垂控制单元,并且所述第一下垂控制单元的输出信号连接到所述第一虚拟电流源,以仿真第一速度调节器。
[0057]
优选地,所述第二端子包括第二下垂控制单元,并且所述第二下垂控制单元的输出信号连接到所述第二虚拟电流源,以仿真第二速度调节器。
[0058]
优选地,所述第一端子包括第一下垂控制单元,并且所述第一下垂控制单元的输出信号连接到所述第一pll单元,以仿真第一虚拟机械速度调节器。
[0059]
优选地,所述第二端子包括第二下垂控制单元,并且所述第二下垂控制单元的输出信号连接到所述第二pll单元,以仿真第二虚拟机械速度调节器。
[0060]
优选地,第一因子k
vsm1
被配置为通过用k
vsm1
成比例地缩放第一虚拟导纳的输出信号,连续地从电压源到电流源改变所述第一端子的特性。
[0061]
优选地,第二因子k
vsm2
被配置为通过用k
vsm2
成比例地缩放第二虚拟导纳的输出信号,连续地从电压源到电流源改变所述第二端子的特性。
[0062]
优选地,所述第一下垂控制单元、所述第一虚拟导纳单元或所述第一pll单元中的至少一个被配置为接收所述因子k
vsm1
以增大或减小所述第一端子对所述第一电网中的干扰的惯性响应。
[0063]
优选地,所述第二下垂控制单元、所述第二虚拟导纳单元或所述第二pll单元中的至少一个被配置为接收所述因子k
vsm2
以增大或减小所述第二端子对所述第二电网中的干扰的惯性响应。
[0064]
优选地,k
vsm1
通过用k
vsm1
成比例地缩放所述第一虚拟导纳的所述输出信号、用k
vsm1
成反比例地缩放所述第一pll单元的比例增益和/或用k
vsm1
成比例地缩放第一下垂常数来缩放所述第一vsm的标称功率。
[0065]
优选地,k
vsm2
通过用k
vsm2
成比例地缩放所述第二虚拟导纳的所述输出信号、用k
vsm2
成反比例地缩放所述第二pll单元的比例增益和/或用k
vsm2
成比例地缩放第二下垂常数来缩放所述第二vsm的标称功率。
[0066]
优选地,k
vsm1
缩放旋转轮因子或瞬态功率或惯性中的至少一个。
[0067]
优选地,k
vsm2
缩放旋转轮因子或瞬态功率或惯性中的至少一个。
[0068]
优选地,所述系统还包括第三端子,所述第三端子被配置为连接到第三电力电网,所述第三端子包括第三下垂控制单元、第三电流控制单元、第三虚拟导纳单元和第三pll单元,其中所述第三虚拟导纳单元和所述第三pll单元被配置为仿真第三虚拟同步机vsm的惯性,并且第三虚拟电流源并联连接到所述第三vsm。优选地,所述控制器被配置为:使用由所述第一vsm消耗的瞬态功率p
vsm1
和由所述第二vsm消耗的瞬态功率p
vsm2
生成功率等效的电流基准以控制所述第三虚拟电流源,使用由所述第一vsm消耗的瞬态功率p
vsm1
和由所述第三vsm消耗的瞬态功率p
vsm3
生成功率等效的电流基准以控制第二虚拟电流源,以及使用由第二vsm消耗的瞬态功率p
vsm2
和由第三vsm消耗的瞬态功率p
vsm3
生成功率等效的电流基准以控制所述第一虚拟电流源。
[0069]
本公开还涉及一种用于控制电网互联的电网形成矢量电流控制方法。所述方法包括:提供被配置为连接到第一电力电网的第一端子,所述第一端子包括第一电流控制单元、第一虚拟导纳单元和第一锁相环pll单元;用所述第一虚拟导纳单元和所述第一pll单元仿真第一虚拟同步机vsm的惯性;提供并联连接到第一vsm的第一虚拟电流源。所述方法还包括:提供被配置为连接到第二电力电网的第二端子,所述第二端子包括第二电流控制单元、第二虚拟导纳单元和第二pll单元;用所述第二虚拟导纳单元和所述第二pll单元仿真第二虚拟同步机vsm的惯性;提供并联连接到第二vsm的第二虚拟电流源。所述方法还包括:使用由所述第一vsm消耗的瞬态功率p
vsm1
生成功率等效的电流基准以控制所述第二虚拟电流源,以及使用由所述第二vsm消耗的瞬态功率p
vsm2
生成功率等效的电流基准以控制所述第一虚拟电流源。
[0070]
多个实施方案可以优选地实施以下特征:
[0071]
优选地,所述第一端子包括第一下垂控制单元,并且所述方法包括将所述第一下垂控制单元的输出信号连接到所述第一虚拟电流源,以仿真第一速度调节器。
[0072]
优选地,所述第二端子包括第二下垂控制单元,并且所述方法包括将所述第二下垂控制单元的输出信号连接到所述第二虚拟电流源,以仿真第二速度调节器。
[0073]
优选地,所述第一端子包括第一下垂控制单元,并且所述方法包括将所述第一下垂控制单元的输出信号连接到所述第一pll单元,以仿真第一虚拟机械速度调节器。
[0074]
优选地,所述第二端子包括第二下垂控制单元,并且所述方法包括将所述第二下垂控制单元的输出信号连接到所述第二pll单元,以仿真第二虚拟机械速度调节器。
[0075]
优选地,所述方法包括应用第一因子k
vsm1
,通过用k
vsm1
成比例地缩放第一虚拟导纳的输出信号,连续地从电压源到电流源改变所述第一端子的特性。
[0076]
优选地,所述方法包括应用第二因子k
vsm2
,通过用k
vsm2
成比例地缩放第二虚拟导纳的输出信号,连续地从电压源到电流源改变所述第二端子的特性。
[0077]
优选地,所述方法包括将所述因子k
vsm1
馈送到所述第一下垂控制单元、所述第一虚拟导纳单元或所述第一pll单元中的至少一个中,以增大或减小所述第一端子对所述第一电网中的干扰的惯性响应。
[0078]
优选地,所述方法包括将所述因子k
vsm2
馈送到所述第二下垂控制单元、所述第二虚拟导纳单元或所述第二pll单元中的至少一个中,以增大或减小所述第二端子对所述第二电网中的干扰的惯性响应。
[0079]
优选地,所述方法包括通过用k
vsm1
成比例地缩放所述第一虚拟导纳的所述输出信号、用k
vsm1
成反比例地缩放所述第一pll单元的比例增益和/或用k
vsm1
成比例地缩放第一下垂常数来用所述因子k
vsm1
缩放所述第一vsm的标称功率。
[0080]
优选地,所述方法包括通过用k
vsm2
成比例地缩放所述第二虚拟导纳的所述输出信号、用k
vsm2
成反比例地缩放所述第二pll单元的比例增益和/或用k
vsm2
成比例地缩放第二下垂常数来用所述因子k
vsm2
缩放所述第二vsm的标称功率。
[0081]
优选地,所述方法包括用所述因子k
vsm1
来缩放旋转轮因子或瞬态功率或惯性中的至少一个。
[0082]
优选地,所述方法包括用所述因子k
vsm2
来缩放旋转轮因子或瞬态功率或惯性中的至少一个。
[0083]
优选地,所述方法包括提供被配置为连接到第三电力电网的第三端子,所述第三端子包括第三电流控制单元、第三虚拟导纳单元和第三pll单元;用所述第三虚拟导纳单元和所述第三pll单元来仿真第三虚拟同步机vsm的惯性;提供并联连接到所述第三vsm的第三虚拟电流源。
[0084]
优选地,所述方法包括使用由所述第一vsm消耗的瞬态功率p
vsm1
和由所述第二vsm消耗的瞬态功率p
vsm2
来生成功率等效的电流基准以控制所述第三虚拟电流源。
[0085]
优选地,所述方法包括使用由所述第一vsm消耗的瞬态功率pvsm1和由所述第三vsm消耗的瞬态功率pvsm3来生成功率等效的电流基准以控制所述第二虚拟电流源。
[0086]
优选地,所述方法包括使用由所述第二vsm消耗的瞬态功率pvsm2和由所述第三vsm消耗的瞬态功率pvsm3来生成功率等效的电流基准以控制所述第一虚拟电流源。
[0087]
本公开的所提出的方法和系统除了别的以外具有以下有益效果:
[0088]-可以提供链路两个端子上的虚拟同步发电机的特性,而无需dc链路中的过多的能量存储。
[0089]-可以用单个因子容易地适配每个端子上的电网支持的量。
[0090]-可以在不改变控制模式的情况下提供从电压源特性到电流源特性的平滑并且流畅的转变。
[0091]-可以在不失去同步的情况下提供以最大电流平滑地转变进入操作和退出操作。
[0092]-改进的故障处理能力。
[0093]-弱电网和强电网中的改进的性能:因为有功功率设定点跟踪和调节器控制在概念上是用快速电流控制回路实施的,所以不存在当使用vsm控制时常常可以观察到的强电网中的性能退化。
[0094]-所使用的电网形成矢量电流控制支持并网操作以及独立运行的电网形成/孤岛操作,而没有任何控制模式或参数改变。
[0095]-显式电流控制和电流限制。
[0096]-提供显式pll以在闭合mcb之前与电网同步并且防止在故障期间失去同步。
[0097]-pll与虚拟导纳一起用作虚拟摆动方程,从而避免使用功率平衡进行同步。
[0098]-简单性以及减少的调试工作量:与在一个端子上具有虚拟同步发电机控制的常规实施方式相比,使用电网形成矢量电流控制可以显著减少所需的调整参数的量。
[0099]
下文参考附图详细描述本公开的多个示例性实施方案。提供附图仅是出于例示目的并且仅描绘本公开的示例性实施方案以便于读者对本公开的理解。
[0100]
因此,附图不应被认为是对本公开的广度、范围或适用性的限制。
[0101]
应注意,为了清楚和易于例示,这些附图不一定按比例绘制。
[0102]
图1示出了根据现有技术的电网互联/hvdc链路的示意图的一个示例。
[0103]
图2示出了根据现有技术的电网互联/hvdc链路的示意图的一个示例。
[0104]
图3示出了根据现有技术的电网互联/hvdc链路的示意图的一个示例。
[0105]
图4示出了根据现有技术的电网互联/hvdc链路的示意图的一个示例。
[0106]
图5a和图5b示出了根据本公开的示意图。
[0107]
图6a和图6b示出了根据本公开的示意性块图。
[0108]
图7示出了根据本公开的电网形成矢量电流控制的基本结构。
[0109]
图8a至图8c示出了根据本公开的虚拟机变型方案。
[0110]
图9a和图9b示出了根据本公开的所提出的控制方案的等效模型。
[0111]
图10描绘了根据本公开的瞬态情形的矢量图。
[0112]
图11是示出根据本公开的使用因子k
vsm
来调整电网支持的量的块图。
[0113]
图12示出了根据本公开的用于控制电网互联的电网形成矢量电流控制系统的示意图。
[0114]
图13示出了根据本公开的用于电网互联的端子的控制系统的示意性块图。
[0115]
图14示出了根据本公开的用于电网互联的端子的控制系统的示意性块图。
[0116]
图15示出了根据本公开的电网互联的示意图。
[0117]
图16示出了用于控制根据图15的电网互联的电网形成矢量电流控制系统的示意图。
[0118]
图17示出了在瞬态电网支持模式下用于控制电网互联的电网形成矢量电流控制系统的行为的示意性例示。
[0119]
图18示出了在瞬态电网支持模式下dc链路电压的行为的示意性例示。
[0120]
图19示出了在全电网支持模式下用于控制电网互联的电网形成矢量电流控制系统的行为的示意性例示。
[0121]
图20示出了在全电网支持模式下dc链路电压的行为的示意性例示。
[0122]
图5示意性地描绘了根据本公开的电网形成矢量电流控制(gfvcc)系统。具体地,图5a示出了具有并联连接的电流源的虚拟同步机(vsm),而图5b示出了其等效电路图。该系统仿真虚拟机(其标称功率和电网支持的量可以用单个输入/参数独立地和在线地缩放)和并联连接的电流源的组合效应。因此,可以远程地控制该系统。对于某些方面,例如故障处理,可以优选的是,在应用代码内改变标称功率和电网支持的量。
[0123]
更详细,根据一个示例性实施方案的公开的gfvcc系统使用如图6中所示出的控制块来仿真所提出的行为。下文将讨论其计算。图6a包括由公共耦合点(pcc)处的电压v
pcc
馈电的锁相环(pll)块以及具有作为输入的参考频率f
ref
的速度控制块。pll的输出与v
pcc
和虚拟同步机的电压v
vsm
一起被提供给虚拟导纳块。速度控制输出、虚拟导纳输出以及参考电流iref
然后在输出电压v
out
的电流控制块中被处理。
[0124]
图6b附加地包括作为到pll块、速度控制块和电流控制块中的至少一个的输入的参数k
vsm
。由此,主电网的电网支持的量可以被控制。k
vsm
也可以被用来将控制方案的特性从电压源平滑地改变到电流源、还支持这两种特性的混合。平滑地转变到严格的电流控制在电网故障期间可以是有益的,以保持与电网同步。控制模式不必须被改变。
[0125]
该gfvcc系统还可以包括有功电压调节器(avr)。根据该示例性实施方案的gfvcc系统仿真虚拟惯性、阻尼器绕组、虚拟定子阻抗、avr以及下垂调节器的组合效应。使用标准pll块来仿真虚拟惯性和阻尼器绕组。
[0126]
与常规虚拟机实施方式相反,有功功率设定点跟踪和下垂调节器在概念上用快速电流源来实施。因此,在强电网中不存在当使用vsm控制时常常观察到的性能退化。因此,实现了在弱电网中和在强电网中的良好性能。该方法支持意外的孤岛(islanding)和被孤岛(islanded)操作。
[0127]
该控制方案的复杂性和相关的调试工作量是非常低的。由于移除了级联电压控制回路并且通过重新使用pll来仿真惯性和阻尼,参数的数目可以从在常规方法中的多于15个减小到仅具有明确含义和较少交互的7个参数。因此,该系统也可以被更容易地调谐。
[0128]
所提出的概念的另外的优点是,用单个参数配置电网支持的量以简化在具有低能量存储的应用——诸如数据中心中的ups、具有低存储或没有存储的pv、具有缓冲电池的ev充电、不敏感负载等——中提供电网支持特征的可能性,以及在不丢失同步的情况下以最大电流平滑地转变进入操作和退出操作,从而改进故障处理能力。
[0129]
该gfvcc系统提供明确的电流控制和电流限制以及明确的pll,用于在闭合mcb之前与电网同步,并且用于防止故障期间的同步丢失。pll与虚拟导纳一起用作虚拟摆动方程(swing equation),从而避免使用功率平衡的同步。
[0130]
图7至图11示出了所提出的电网支持控制方案和相应的等效电路的更详细的概述。
[0131]
在图5a和图5b中概念性地描绘了图7的控制方案。图5a的控制方案可以被分成两个功能部分,所述两个功能部分分别是不具有任何调节器的vsm(即旋转轮或惯性,如虚线所示出的)和在虚拟同步机的端子处并联连接的电流源。用pll来仿真虚拟同步机的行为。该电流源在并联地工作。它同时用作快速功率设定点跟踪器和调节器,因为它确保了电网和旋转轮之间的稳态功率平衡。有功功率的惯性响应由虚拟导纳确保。在稳态下,流到电网的全部功率由电流源注入。该旋转轮仅在瞬态期间注入功率。
[0132]
图7示出了根据一个实施方案的gvcc系统,该gvcc系统具有下垂控制单元1、电流控制单元2、虚拟导纳单元3和锁相环(pll)单元4。虚拟导纳单元3和pll单元4被配置为仿真vsm的惯性,并且虚拟电流源5并联连接到该vsm。在此实施方案中,下垂控制单元1的输出信号连接到虚拟电流源5,以仿真速度调节器。
[0133]
现在将更详细描述根据一个优选实施方案的gvcc系统。虚拟同步机的传统先进实施方式的最简单形式是基于摆动方程。虚拟同步机控制的目标是使转换器在公共耦合点(pcc)处的行为等于同步机的行为。
[0134]
图8a至图8c是相应部件的等效电路,即先进的虚拟机变型方案。具体地,图8a示出了转换器,图8b示出了不具有虚拟电感的vsm,并且图8c示出了具有虚拟电感的vsm。
[0135]
出于简化的原因,以下推导基于具有电感输出滤波器的转换器。然而,本文所提出的控制方法适用于具有任何类型的输出滤波器结构——诸如l、lc或lcl——的转换器。
[0136]
摆动方程将电压源vc的频率的改变与流出或流入机器的有功功率耦合。在不具有虚拟电感的vsm的情况下,转换器电压vc等于虚拟机的反电动势(back-emf)。转换器滤波器电感lc等于虚拟机的定子电感,并且pcc电压v
pcc
等于虚拟机的定子电压。转换器电压vc(虚拟反电动势)具有旋转频率ωr以突出其与虚拟转子频率的等效性。pcc电压(虚拟定子电压)具有旋转频率ω
pcc
。摆动方程如下:
[0137][0138][0139]
在准稳态下,功率流由转换器滤波器电抗xc=ωn*lc两端的虚拟反电动势vc和pcc电压v
pcc
之间的角度差给出。
[0140][0141]
跨传输线路的部分存在功率流、电抗和角度差的直接依赖性,即
[0142][0143]
摆动方程因此变为
[0144][0145][0146]
在第二步骤中,根据图8c,先进的vsm实施方式已经引入了虚拟电抗x
vs
=ωn*l
vs
。该虚拟电抗略微改变了该方程。在相量标记法中的转换器电压vc根据以下公式计算:
[0147]vc
=v
v-jx
vs
·
icꢀꢀꢀ
(6)
[0148]
该机器的虚拟反电动势被指定为vv(具有旋转频率ωr和角度θr)并且已经移动到虚拟电抗x
vs
之后。关于pcc处的行为,虚拟机现在具有xv=xc+x
vs
的总虚拟定子电抗,并且功率流方程改变为
[0149][0150]
并且摆动方程变为
[0151][0152][0153]
应注意,虚拟电感l
vs
与转换器滤波器电感lc串联,并且因此增加从pcc看到的虚拟
机的总虚拟定子电感。
[0154]
图9a和图9b示出了根据一个示例性实施方案的控制方案的等效模型。其中,摆动方程不是如传统方法中那样直接实施的。此外,将pll与虚拟导纳一起的效应与摆动方程进行比较。角度θr不再通过摆动方程计算,而是它是根据pll方程的pll的输出:
[0155][0156][0157]
计算方程(9)的导数产生:
[0158][0159][0160]
对于小角度差(其是合理的pll调谐的情况),正弦函数可以近似为sin(θ
r-θ
pcc
)≈(θ
r-θ
pcc
),并且其导数变为sin(θ
r-θ
pcc
)≈ω
r-ω
pcc
。
[0161]
方程组因此也可以被用公式表示为如下:
[0162][0163][0164]
通过将方程(11)与原始摆动方程(1)进行比较,两个方程的形式等效的pll增益可以是
[0165][0166]
下文在后一步骤中将用并联电流源代替调节器功率。因此,pll的比例增益仿真阻尼器绕组效果,并且积分增益将角度差与频率的增加/减小耦合,从而仿真同步机器的自同步原理。
[0167]
与摆动方程相反,pll不隐式地(implicitly)将功率流与角度差耦合,因为它仅描述内部pll角度θr的演变。必须使用用于电流控制器的附加的电流基准来明确地确保功率流与角度差的耦合。用相当于虚拟定子阻抗的倒数的虚拟导纳来创建该基准,即
[0168]yv
(s)=zv(s)-1
ꢀꢀꢀꢀꢀꢀ
(13)
[0169]
定子阻抗被假定为rl类型。如果在dq参考坐标系中实施该导纳,则它可以被描述如下
[0170][0171]
[0172]
根据虚拟导纳和与pll参考坐标系(vv=vn+j*0)的d方向对齐的虚拟反电动势电压vv与pcc电压v
pcc
(这被示出在描绘针对瞬态情形的矢量图中)之间的电压差的矩阵乘法来创建电流基准i
v,dq
。
[0173]iv,d
=y
v,dd
(s)
·
(v
pcc,d-vn)+y
v,dq
(s)
·vpcc,q
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0174]iv,q
=y
v,,qd
(s)
·
(v
pcc,d-vn)+y
v,qq
(s)
·vpcc,q
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0175]
替代地,也可以适用于复数并且根据下式实施导纳
[0176][0177]
在稳态下且假设rv<<ωn*lv,导纳简化为
[0178][0179]
并且因此导致以下稳态电流基准:
[0180][0181][0182]
如果pcc电压v
pcc
等于标称电压vn,则可以忽略注入的q轴电流。因此,在虚拟定子电抗(xv=ωn*lv)上q电压与d方向上的有功电流之间的耦合可以被描述为:
[0183][0184]
其中,相关功率流(假设快速电流跟踪)是
[0185][0186]
因此,根据本公开,确保了由摆动方程调节的准稳态功率流与由pll+虚拟导纳组合创建的功率流之间的等效性。
[0187]
虚拟导纳可以用全动态模型来实施,以确保高频率谐振的被动性(passivity)和阻尼。然而,简化的导纳模型(忽略s*l项)也是可能的,准许附加的滤波功能的更复杂的模型也是可能的。甚至不对称导纳也是可能的。最小要求是实施q电压和有功电流之间的耦合。
[0188]
已经表明,用于pll增益的特定设置和虚拟导纳的组合允许使用用于矢量电流控制的常规控制结构来仿真虚拟同步电机的惯性、阻尼器绕组和定子阻抗的效应。
[0189]
在下面,进一步描述下垂块。与原始vsm实施方式不同,所提出的控制方法仅实施不具有用于机械输入功率的调节器的旋转轮。因此,从旋转轮注入的功率在稳态下(i
v,d
=0)将为零,并且角度θr与θ
pcc
对齐。
[0190]
调节器功率由确保稳态功率平衡的电流源代替。除了来自虚拟导纳的基准之外,根据下式创建有功电流基准
[0191][0192]
其导致注入的功率为
[0193]
p=v
pcc,d
·id,ref
=v
pcc
cos(θ
r-θ
pcc
)
·id,ref
=p
set
+kg·
(ω
r-ω
set
)
ꢀꢀꢀ
(25)
[0194]
主要区别在于,此电流基准被直接馈送到电流控制器,没有对摆动方程进行滤波。设定点改变直接馈通(feed through)并且与vsm实施方案相比被更快速地遵循。
[0195]
对于旋转轮的合理的荷载条件和合理的虚拟定子电抗,角度差θ
r-θ
pcc
是小的,且cos(θ
r-θ
pcc
)接近一。在该情况下,除以v
pcc,d
可以由除以常数vn代替。
[0196]
此外,可以添加有功电压调节器(avr)以保持pcc电压常数的大小。avr块可以是pi或积分器(i)类型的、或仅是比例类型(p)。它创建用来调节电压幅度的q电流基准i
qref
。
[0197]iqref
=g
avr
(s)-(|y
pcc
|-vn)
ꢀꢀꢀꢀꢀꢀ
(26)
[0198]
然而,因为虚拟导纳已经用下式实施比例增益avr效果,所以也可以省略avr块
[0199][0200]
如上文已经指示的,可以使用因子k
vsm
来调整或缩放电网支持的量。优选地,因子k
vsm
是连续的并且在从0到1的范围内。用此因子,可以缩放可以被认为与具有单个因子的电流源并联操作的虚拟机的标称功率。k
vsm
的连接和输入被示出在图6b中。方程如下:
[0201]yvirt
=k
vsm
·yvirt,n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(28)
[0202]
m=k
vsm
·mn
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(29)
[0203]
kg=k
vsm
·kg,n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(30)
[0204][0205]
参考图7,下垂块、虚拟导纳块和pll块的修改的块图被示出在图11中。
[0206]
重要的是,使在pll块中所使用的k
vsm
的倒数饱和到最大值,以保持pll回路稳定。pll回路的太高的比例增益可以导致不稳定——一种具有pll的标准矢量电流控制的众所周知的效应。
[0207]
应注意,通过缩放vsm的标称功率来调整电网支持的量是gvcc的控制结构的一个独特特征。并联的电流源的标称功率不受影响,并且该控制结构因此可以继续以常规电流控制操作并具有最大功率容量,即使k
vsm
被设置为零。
[0208]
此特征可以不用常规vsm实施方式来实现。用标准vsm,功率传送能力与vsm的标称功率有关联。通过在vsm中提前虚拟反电动势的角度来控制功率流,并且在虚拟定子电抗上施加电压差。减小vsm的标称功率导致该电抗的增加,并且因此,需要增加的角度差来传送相同量的功率。因为最大角度差被限制到90
°
,所以功率传送能力随着vsm的标称功率而降低。因此,在常规控制方法中,不能够独立地调整vsm的标称功率。除本文所公开的应用之外的其它应用也是可行的。
[0209]
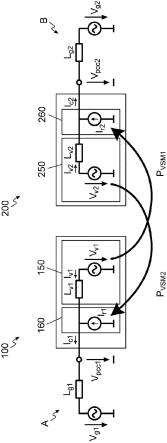
图12示出了用于控制电网互联的电网形成矢量电流控制系统的示意性块图。根据本公开,两个端子——连接到第一电力电网a的第一端子100和连接到第二电力电网b的第二端子200——使用上述gfvcc来控制。如上文详细讨论的,此控制方案仿真虚拟发电机,即
与(虚拟)电流源160/260并联连接的虚拟同步机(vsm)150/250。
[0210]
vsm部分仿真同步发电机的惯性响应和低输出阻抗。然而,它不有助于稳态功率交换,因为它缺失在传统虚拟发电机控制方案中实施的直接机械调节器仿真。为了补偿缺失的调节器,可控电流源160/260实际上并联连接到虚拟发电机部分/vsm 150/250。
[0211]
如上文所提及的,在本公开中,电网互联的两个端子100和200都在使用gfvcc。由第二端子200上的控制的vsm部分250消耗的瞬态功率被用作用于第一端子100中的可控电流源160的前馈项,即用作功率等效的电流基准。以相同的方式,由第一端子100上的控制的虚拟发电机/vsm部分150消耗的瞬态功率被用作用于第二端子200上的可控电流源260的前馈项,即用作功率等效的电流基准。
[0212]
设定点被给出为:
[0213][0214][0215][0216][0217][0218][0219][0220][0221][0222][0223]
其中:
[0224]vpcc1,d
:=在电网互联的第一端子处测量的pcc电压的d方向分量
[0225]vpcc1,q
:=在电网互联的第一端子处测量的pcc电压的q方向分量
[0226]vpcc2,d
:=在电网互联的第二端子处测量的pcc电压的d方向分量
[0227]vpcc2,q
:=在电网互联的第二端子处测量的pcc电压的q方向分量
[0228]i1d,ref
:=用于电网互联的第一端子上的控制的虚拟电流源部分的电流基准的d方向分量
[0229]i1q,ref
:=用于电网互联的第一端子上的控制的虚拟电流源部分的电流基准的q方向分量
[0230]i2d,ref
:=用于电网互联的第二端子上的控制的虚拟电流源部分的电流基准的d方向分量
[0231]i2q,ref
:=用于电网互联的第二端子上的控制的虚拟电流源部分的电流基准的q方向分量
[0232]
p
tr
:=用于在电网互联的第一端子和第二端子之间传送的稳态功率的功率传送设定点
[0233]
p
vsm1
:=由第一端子上的控制的vsm部分消耗的功率
[0234]
p
vsm2
:=由第二端子上的控制的vsm部分消耗的功率
[0235]
=用dc链路电压控制创建的电流基准
[0236]qset,1
:=用于在电网互联的第一端子处注入的无功功率的设定点
[0237]qset,2
:=用于在电网互联的第二端子处注入的无功功率的设定点
[0238]
=给予第一端子的电流控制器的总d方向电流基准
[0239]
=给予第一端子的电流控制器的总q方向电流基准
[0240]
=给予第二端子的电流控制器的总d方向电流基准
[0241]
=给予第二端子的电流控制器的总q方向电流基准
[0242]iv1,d
:=由第一端子上的控制的vsm部分创建的电流基准的d方向分量
[0243]iv1,q
:=由第一端子上的控制的vsm部分创建的电流基准的q方向分量
[0244]iv2,d
:=由第二端子上的控制的vsm部分创建的电流基准的d方向分量
[0245]iv2,q
:=由第二端子上的控制的vsm部分创建的电流基准的q方向分量
[0246]
为了简单起见,dc链路电压控制可以仅为第一端子100计算基准然而,它也可以在第一端子100和端子200之间被共享。
[0247]
仅使用i
v1d
和i
v2d
——即由vsm的虚拟旋转轮创建的有功电流——来计算前馈项p
vsm2
和p
vsm1
。在稳态下,两个前馈项都变为零,因为i
v1d
和i
v2d
变为零。第一个公开的概念仅仿真两个端子上的惯性响应并且从相对的端子获得对应的功率以维持功率平衡。稳态特性由功率传送设定点p
tr
和用q
set1
、q
set2
定义的无功功率以及仿真的虚拟发电机(i
v1q
,i
v2q
)的无功功率给出。
[0248]
在下文的实施方案中,讨论了不仅提供瞬态电网支持(惯性响应)还提供稳态电网支持的两种方法。
[0249]
功率传送设定点p
tr
可以是由慢顶层控制器(二级或三级控制,电力交易)计算的量,或它可以另外地含有基于一个端子上的电网频率用针对稳态电网支持的下垂曲线计算的部分。考虑两个端子上的电网频率以确定p
tr
的更复杂的功能也是可能的,如下文所描述的。
[0250]
控制方法的虚拟发电机部分的电流基准(i
v1,dq
,i
v2,dq
)——即前馈项,是用pll和虚拟导纳来仿真虚拟发电机响应的gfvcc的独特特征计算的。在gfvcc中,可以调整虚拟发电机的标称功率,并且因此调整具有单个因子k
vsm
的电网支持的量。可以为每个端子单独地设置它,一个特征——k
vsm
,该特征可以被用来减小端子的强电网侧的电网支持的量,以不太多地干扰弱电网侧。gfvcc存在许多实施方式变型方案和选项,诸如在其他参考坐标系中的电流控制、用k
vsm
因子改进的故障处理、与电流源并联的有源阻尼器支路以及改进的对于不对称状况的处理。
[0251]
图13示例性地示出了用于第一端子100的控制系统的块图。本领域技术人员应理解,用于第二端子的控制系统是类似的。到这个程度,在根据图13的实施方案中所公开的控制系统与在图7中所描绘的控制系统的块图有关。
[0252]
图13示出了根据一个实施方案的用于第一端子100的控制系统的块图,该控制系统具有第一电流控制单元110、第一虚拟导纳单元120和锁相环(pll)单元130。第一虚拟导纳单元120和pll单元130被配置为仿真vsm的惯性,并且虚拟电流源160并联连接到vsm。在此实施方案中,由第二端子200的第二vsm 250消耗的瞬态功率p
vsm2
由该控制系统的控制器(控制器未示出)使用,以生成功率等效的电流基准来控制第一虚拟电流源。此外,由第一vsm 150消耗的瞬态功率p
vsm1
由该控制系统的控制器使用以生成功率等效的电流基准来控制第二端子200的第二虚拟电流源260。本领域技术人员应理解,根据一个实施方案的用于第二端子100的控制系统的块图将看起来对应。此外,本领域技术人员还应理解,两个根据图13中所描绘的实施方案的控制系统可以被组合,一个用于第一端子100并且第二个用于第二端子200,以形成根据本公开的用于控制电网互联的控制系统。
[0253]
根据一个实施方案,在下面描述了一种确定p
tr
的方式。如果一个端子(例如,第二端子200)的控制器配备有典型的下垂曲线,即该端子包括下垂控制单元,则p
tr
通过由下垂曲线和其偏移p
set
确定的稳态功率流确定。
[0254]
上文的方程变为
[0255][0256][0257][0258][0259][0260][0261][0262][0263][0264][0265]
其中p
tr
是
[0266][0267]
并且其中:
[0268]
p
droop,2
:=第二端子上的稳态功率
[0269]
kg:=下垂常数
[0270]
ω
g2
:=在第二端子处测量的电网频率
[0271]
ω
set,2
:=用于第二端子的频率设定点
[0272]
前馈项p
vsm2
需要用由下垂曲线确定的第二端子200上的稳态功率p
droop,2
来扩展。用根据此实施方案的方法,可以实现以下特征:
[0273]-第一端子100:瞬态电网支持(惯性响应)
[0274]-第二端子200:全电网支持,即瞬态(惯性响应)和稳态
[0275]
本领域技术人员应理解,端子上的行为也可以被交换。
[0276]
根据另一个实施方案,下面描述一种确定p
tr
的方式。如果两个端子上的控制器都配备有典型的下垂曲线,则p
tr
通过由下垂曲线和偏移功率确定的稳态功率流的差来确定。
[0277]
方程变为
[0278][0279][0280][0281][0282][0283][0284][0285][0286][0287][0288][0289][0290]
并且其中:
[0291]
p
droop,1
=第一端子上的稳态功率
[0292]
ω
g1
:=在第一端子处测量的电网频率
[0293]
ω
set,1
:=用于第一端子的频率设定点
[0294]
前馈项p
vsm2
和p
vsm1
需要用由相对的端子上的下垂曲线确定的功率流来扩展。
[0295]
稳态传送功率p
rt
变成
[0296]
p
tr
=p
droop,2-p
droop,1
[0297]
假设ω
set,1
=ω
set,2
,这导致以下稳态功率传输:
[0298]
p
tr
=p
set,2-p
set,1-kg·
(ω
g2-ω
g1
)
[0299]
通过设置
[0300][0301]
可以取得p
tr
[0302]
p
tr
=p
set,tr-kg·
(ω
g2-ω
g1
)
[0303]
在图14中描绘了完整的控制方案。
[0304]
用根据此实施方案的方法,可以实现两个端子上的以下特征:
[0305]-端子1:全电网支持,即瞬态(惯性响应)和稳态
[0306]-端子2:全电网支持,即瞬态(惯性响应)和稳态。
[0307]
图14示出了根据一个实施方案的用于第一端子100的控制系统的块图,该控制系统具有第一电流控制单元110、第一虚拟导纳单元120和锁相环(pll)单元130。第一虚拟导纳单元120和pll单元130被配置为仿真vsm的惯性,并且虚拟电流源160并联连接到vsm。在此实施方案中,由第二端子200的第二vsm 250消耗的功率p
vsm2
由该控制系统的控制器(控制器未示出)使用,以生成功率等效的电流基准来控制第一虚拟电流源。此外,由第一vsm 150消耗的功率p
vsm1
由该控制系统的控制器使用,以生成功率等效的电流基准来控制第二端子200的第二虚拟电流源260。此外,根据此实施方案,该控制系统还包括第一下垂控制单元140,并且第一下垂控制单元140的输出信号连接到第一虚拟电流源160,以仿真第一速度调节器。换句话说,可以使用根据本实施方案的控制系统来确定根据前述实施方案中的一个所描述的p
tr
。应进一步理解,根据一个实施方案的用于第二端子200的控制系统将看起来对应。此外,本领域技术人员还应理解,两个根据图14中所描绘的实施方案的控制系统可以被组合,一个用于第一端子100并且第二个用于第二端子200,以形成根据本公开的用于控制电网互联的控制系统。本领域技术人员还应理解,根据图13中所描绘的实施方案的一个控制系统可以与根据图14中所描绘的实施方案的一个控制系统组合,例如,根据图13中所描绘的实施方案的控制系统用于第一端子100并且根据图14中所描绘的实施方案的控制系统用于第二端子200,反之亦然,以形成根据本公开的用于控制电网互联的控制系统。
[0308]
图16示出了用于控制具有如图15中所示出的三个端子的电网互联的电网形成矢量电流控制系统的示意性块图。然而,本领域技术人员应理解,本公开不限于三个端子,而是也可以包括任何数目的端子。根据本公开,所有三个端子——连接到第一电力电网a的第一端子100、连接到第二电力电网b的第二端子200以及连接到第三电力电网c的第三端子300使用前述gfvcc来控制。因此,控制系统的控制器使用由第一vsm消耗的瞬态功率p
vsm1
和由第二vsm消耗的瞬态功率p
vsm2
来生成功率等效的电流基准以控制第三虚拟电流源,使用由第一vsm消耗的瞬态功率p
vsm1
和由第三vsm消耗的瞬态功率p
vsm3
来生成功率等效的电流基准以控制第二虚拟电流源,以及使用由第二vsm消耗的瞬态功率p
vsm2
和由第三vsm消耗的瞬态功率p
vsm3
生成功率等效的电流基准以控制第一虚拟电流源。
[0309]
在三个端子的情况下,方程组被给出如下:
[0310][0311][0312][0313][0314][0315][0316][0317][0318][0319][0320][0321][0322][0323][0324][0325][0326][0327][0328]
其中
[0329]vpcc3,d
:=在电网互联的第三端子处测量的pcc电压的d方向分量
[0330]vpcc3,q
:=在电网互联的第三端子处测量的pcc电压的q方向分量
[0331]i3d,ref
:=用于电网互联的第三端子上的控制的虚拟电流源部分的电流基准的d方向分量
[0332]
p
vsm3
:=由第三端子上的控制的vsm部分消耗的功率
[0333]i3q,ref
:=用于电网互联的第三端子上的控制的虚拟电流源部分的电流基准的q方向分量
[0334]qset,3
:=用于在电网互联的第三端子处注入的无功功率的设定点
[0335]
=给予第三端子的电流控制器的总d方向电流基准
[0336]
=给予第三端子的电流控制器的总q方向电流基准
[0337]iv3,d
:=用第三端子上的控制的vsm部分创建的电流基准的d方向分量
[0338]iv3,q
:=用第三端子上的控制的vsm部分创建的电流基准的q方向分量
[0339]
p
droop,3
:=第三端子上的稳态功率
[0340]
ω
g3
:=在第三端子处测量的电网频率
[0341]k12
:=从第二端子供应的由第一端子上的控制的vsm部分消耗的功率的百分比
[0342]k13
:=从第三端子供应的由第一端子上的控制的vsm部分消耗的功率的百分比
[0343]k21
:=从第一端子供应的由第二端子上的控制的vsm部分消耗的功率的百分比
[0344]k23
:=从第三端子供应的由第二端子上的控制的vsm部分消耗的功率的百分比
[0345]k31
:=从第一端子供应的由第三端子上的控制的vsm部分消耗的功率的百分比
[0346]k32
:=从第二端子供应的由第三端子上的控制的vsm部分消耗的功率的百分比
[0347]
重要的是,功率分配比总和为1:
[0348]k12
+k
13
=1
[0349]k21
+k
23
=1
[0350]k31
+k
32
=1
[0351]
图17示出了在瞬态电网支持模式下用于控制电网互联的电网形成矢量电流控制系统的行为的示意性例示。在此实施方案中,用于互联的功率传送设定点被设置为零。第一端子100示例性地连接到具有scr=40(短路比)的相当强的电网a,并且第二端子200示例性地连接到具有scr=20的第二电网b。在时间t=1s处,在电网a中应用荷载阶跃(load step)。互联向荷载阶跃递送瞬态功率,并且从电网b获得功率。在时间t=3s处,在电网b中应用具有类似的绝对幅度的荷载阶跃。互联向荷载阶跃递送瞬态功率,并且从电网a获得功率。在这两种情况下,功率流在一段时间之后衰减至零,因为仅交换瞬态功率。互联在两个端子上递送惯性响应。已经建立了用于瞬态功率流的透明链路。
[0352]
图18示出了在瞬态电网支持模式下dc链路电压的行为的示意性例示。两个瞬态仅对dc链路电压具有较小影响,并且控制器能够维持稳定的dc链路。尽管根据此实施方案,使用在低电压电平上的缩小的转换器,但是对于中等电压和高电压设置,可以预期相同的行为。
[0353]
图19示出了在全电网支持模式下用于控制电网互联的电网形成矢量电流控制系统的行为的示意性例示。根据此实施方案,提供了双侧全电网支持(惯性响应和稳态支持)。用于互联的功率传送设定点被设置为零。第一端子100示例性地连接到具有scr=40的相当强的电网a,并且第二端子200示例性地连接到具有scr=20的电网b。在时间t=1s处,在电
网a中应用荷载阶跃。互联将瞬态功率和稳态功率递送到荷载阶跃,并且从电网b获得功率。在时间t=3s处,在电网b中应用具有类似的绝对幅度的荷载阶跃。因为电网b比电网a弱,所以每个单元中的荷载阶跃较高,并且电网b中的电网频率将下降到较低的值。因此,互联中的功率流将反向并且开始支持电网b,与电网a相比,该电网b有更重的荷载。互联将瞬态功率和稳态功率递送到电网b并且从电网a获得功率。
[0354]
图20示出了全电网支持模式下的dc链路电压的行为的示意性例示。两个瞬态仅对dc链路电压有较小的影响,并且控制器能够维持稳定的dc链路。尽管根据此实施方案,使用在低电压电平上的下缩转换器,但是对于中压和高电压设置,可以预期相同的行为。
[0355]
将从上文的
技术实现要素:
以及下面的描述——包括附图和权利要求——明确其他方面,特征和优点。
[0356]
虽然已经在附图和前面的描述中详细示出并且描述了本发明,但是这样的例示和描述应被认为是例示性的或示例性的而非限制性的。应理解,在所附权利要求的范围内,本领域普通技术人员可以做出改变和修改。具体地,本发明涵盖了具有来自上文和下文所描述的不同实施方案的特征的任何组合的另外的实施方案。
[0357]
此外,在权利要求中,词语“包括”不排除其他元件或步骤,并且不定冠词“一(a)”或“一个(an)”不排除多个。单个单元可以实现权利要求中所记载的若干个特征的功能。术语“基本上”、“大约”、“近似地”等与属性或值结合特别地也分别确切地定义该属性或确切地定义该值。权利要求中的任何附图标记不应被解释为限制范围。
[0358]
附图标记
[0359]
第一端子
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
[0360]
第一电流控制单元
ꢀꢀꢀꢀ
110
[0361]
第一虚拟导纳单元
ꢀꢀꢀꢀ
120
[0362]
第一pll单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130
[0363]
第一下垂控制单元
ꢀꢀꢀꢀ
140
[0364]
第一vsm
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
150
[0365]
第一虚拟电流源
ꢀꢀꢀꢀꢀꢀ
160
[0366]
第二端子
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
[0367]
第二电流控制单元
ꢀꢀꢀꢀ
210
[0368]
第二虚拟导纳单元
ꢀꢀꢀꢀ
220
[0369]
第二pll单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
230
[0370]
第二下垂控制单元
ꢀꢀꢀꢀ
240
[0371]
第二vsm
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
250
[0372]
第二虚拟电流源
ꢀꢀꢀꢀꢀꢀ
260
[0373]
第一电力电网
ꢀꢀꢀꢀꢀꢀꢀꢀa[0374]
第二电力电网
ꢀꢀꢀꢀꢀꢀꢀꢀb[0375]
第三电力电网
ꢀꢀꢀꢀꢀꢀꢀꢀc[0376]
引文列表
[0377]
[1]j.rocabert、a.luna、f.blaabjerg和p.rodr
í
guez,“交流微电网中功率转换器的控制”,ieee电力电子汇刊,第27卷,第11期,第4734-4749页,2012年11月;
[0378]
[2]s.d'arco和j.a.suul,“虚拟同步机——实现方式的分类以及微电网下垂控制器的等效性分析”,2013年ieee格勒诺布尔会议,格勒诺布尔,2013年,第1-7页;
[0379]
[3]y.sun、x.hou、j.yang、h.han、m.su和j.m.guerrero,“交流微电网中下垂控制的新视角”,ieee工业电子汇刊,第64卷,第7期,第5741-5745页,2017年7月;
[0380]
[4]m.zhang、x.yuan和j.hu,“附接至孤岛交流系统时pll同步vsc hvdc的惯性和主频率规定”,ieee电力系统汇刊,第33卷,第4期,第4179-4188页,2018年7月;
[0381]
[5]h.liu和j.sun,“具有ac收集和hvdc输电的离岸风电场的电压稳定性及控制”,ieee电力电子新兴和精选主题刊,第2卷,第4期,第1181-1189页,2014年12月;
[0382]
[6]j.r.p
é
rez、j.a.suul、s.d'arco、a.rodriguez-cabero和m.prodanovic,“用于电力系统振荡阻尼的vsc hvdc的虚拟同步机控制”,iecon 2018年-第44届ieee工业年会电子学会,华盛顿特区,2018年,第6026-6031页;
[0383]
[7]j.zhu、c.d.booth、g.p.adam、a.j.roscoe和c.g.bright,“vsc-hvdc输电系统的惯性仿真控制策略”,ieee电力系统汇刊,第28卷,第2期,第1277-1287页,2013年5月。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1