一种并网逆变器的功率控制方法、装置和并网逆变器
1.本发明涉及地区安全技术领域,特别是涉及一种并网逆变器的功率控制方法、装置和并网逆变器。
背景技术:
2.电压源逆变器(voltage source inverter,vsi)在可再生能源系统、分布式发电系统和电气化运输系统的中被广泛用作电网接口,将直流电转换为交流电。但由于负载不平衡、短路故障等原因,vsi可能会在不对称电压跌落下运行。针对不对称电压跌落下vsi的控制,直接功率控制(direct power control,dpc)由于无电流控制环、动态响应快、结构简单等优势而得到了广泛的应用。基于查表法的直接功率控制尽管结构简单、动态响应快,但存在稳态控制脉动大、开关频率不固定等问题。为解决这些问题,一方面,基于模型预测控制的直接功率控制(mpc
‑
dpc)通过引入目标函数,并以目标函数最优作为每周期有效电压矢量选取基准,而后引入零电压矢量进行调制,获取了稳定的开关频率,并降低了稳态功率脉动,但每周期内需对全部电压矢量的目标函数进行计算,计算较复杂。另一个是基于空间矢量调制的直接功率控制(svm
‑
dpc),其中引入了svm来合成电压矢量,而不是mpc
‑
dpc中的成本函数和电压矢量选择。在文献[1]中,在具有可调功率补偿的改进型dpc中开发了比例积分加谐振(proportional
‑
integral
‑
resonant controller,pir)控制器。但是,功率补偿是基于正序和负序的电压、电流来计算的。然后,为了消除序列提取,在文献[2]中使用了滑模控制方法,提出了一种基于拓展有功和无功功率的dpc。然而,滑模控制器的实现复杂且难以保证收敛到其平衡点。文献[3,4]提出了一种具有稳态性能的电网电压调制dpc。但是这种方法仅适用于电压平衡的电网。在电网电压不对称跌落的情况下,由于正序电压降低,转换器电流可能会超过其最大值,以跟踪预定的平均功率。因此,电流/功率限制器对于将电流限制在不对称电压跌落下的设定阈值至关重要。在文献[5]中,基于其均方根值(root mean square,rms)设计了限流器。但是,rms计算的速度是应用的主要障碍。在文献[6]中,基于电流大小提出了每个相的单独限流器。但是,电流大小的差异可能会引入高频噪声和数值误差。
技术实现要素:
[0003]
本方案的一个目的在于提供一种并网逆变器的功率控制方法,该方法无需锁相环和旋转坐标变换就能实现对并网逆变器的灵活控制,从而实现在不对称电压跌落下对并网逆变器输出无功功率和有功功率的灵活调节,具有实施便捷、控制简单、动态响应快等特点。
[0004]
本方案的另一个目的在于提供一种执行上述别方法的装置和设备。
[0005]
为达到上述目的,本方案如下:
[0006]
一种并网逆变器的功率控制方法,该方法在αβ两相静止坐标系中实施,包括:
[0007]
基于电网功率和拓展功率计算电网的反馈功率;
[0008]
基于对新视在功率的限制确定并网逆变器的参考功率值;
[0009]
基于所述参考功率值和所述反馈功率值的差值确定并网逆变器的三相输出电压;
[0010]
其中,所述电网功率包括电网有功功率和电网无功功率;
[0011]
所述参考功率包括并网逆变器的参考有功功率和参考无功功率;
[0012]
所述拓展功率为用延迟四分之一个周期的电网电压与电网电流的乘积值;
[0013]
所述新视在功率为单位功率因数下电网有功功率和零功率因数下电网无功功率中的最小值。
[0014]
优选的,所述基于电网功率和拓展功率计算电网的反馈功率如式(19)所示:
[0015][0016]
其中,p
fb
表示电网有功功率的反馈功率,q
fb
表示电网无功功率的反馈功率;p
ex
表示电网有功功率的拓展功率,q
ex
表示电网无功功率的拓展功率;p表示电网的有功功率,q表示电网的无功功率;λ表示可调参数,λ∈[0,1]。
[0017]
优选的,所述基于对新视在功率的限制确定并网逆变器的参考功率值包括:根据式(29)确定并网逆变器的参考无功功率值,
[0018][0019]
其中,q
ref
为并网逆变器的参考无功功率值,q
max
为正序电压下的并网逆变器的最大输出无功功率,u
g+
为正序电压,k
q
为比例系数;
[0020]
根据式(31)确定并网逆变器的参考有功功率值,
[0021][0022]
其中,
[0023]
p
max
为并网逆变器的最大允许有功功率,p
ref
为并网逆变器的参考有功功率,apl为并网逆变器提供的最大功率值。
[0024]
优选的,基于所述参考功率值和所述反馈功率值的差值确定并网逆变器的三相输出电压包括:
[0025]
基于所述参考功率值和所述反馈功率值的差值获得并网逆变器的有功调制电压v
p
和无功调制电压v
q
;
[0026]
基于所述有功调制电压v
p
和无功调制电压v
q
获得并网逆变器在αβ两相静止坐标系中的输出调制电压v
α
和v
β
;
[0027]
对输出调制电压v
α
和v
β
进行脉冲宽度调制,获得并网逆变器的三相输出电压。
[0028]
第二方面,提供一种并网逆变器的功率控制装置,该装置包括:
[0029]
反馈功率计算单元,基于电网功率和拓展功率计算电网的反馈功率;
[0030]
参考功率确定单元,基于对新视在功率的限制确定并网逆变器的参考功率值;
[0031]
调节单元,基于所述参考功率值和所述反馈功率值的差值确定并网逆变器的三相输出电压;
[0032]
其中,所述电网功率包括电网有功功率和电网无功功率;
[0033]
所述参考功率包括并网逆变器的参考有功功率和参考无功功率;
[0034]
所述拓展功率为用延迟四分之一个周期的电网电压与电网电流的乘积值;
[0035]
所述新视在功率为单位功率因数下电网有功功率和零功率因数下电网无功功率中的最小值。
[0036]
优选的,所述反馈功率计算单元基于以下公式计算电网的反馈功率:
[0037][0038]
其中,p
fb
表示电网有功功率的反馈功率,q
fb
表示电网无功功率的反馈功率;p
ex
表示电网有功功率的拓展功率,q
ex
表示电网无功功率的拓展功率;p表示电网的有功功率,q表示电网的无功功率;λ表示可调参数,λ∈[0,1]。
[0039]
优选的,所述参考功率确定单元确定并网逆变器的参考功率值包括执行以下操作:
[0040]
根据式(29)确定并网逆变器的参考无功功率值,
[0041][0042]
其中,q
ref
为并网逆变器的参考无功功率值,q
max
为正序电压下的并网逆变器的最大输出无功功率,u
g+
为正序电压,k
q
为比例系数;
[0043]
根据式(31)确定并网逆变器的参考有功功率值,
[0044][0045]
其中,
[0046]
p
max
为并网逆变器的最大允许有功功率,p
ref
为并网逆变器的参考有功功率,apl为并网逆变器提供的最大功率值。
[0047]
优选的,所述调节单元确定并网逆变器的三相输出电压包括执行以下操作:
[0048]
基于所述参考功率值和所述反馈功率值的差值获得并网逆变器的有功调制电压v
p
和无功调制电压v
q
;
[0049]
基于所述有功调制电压v
p
和无功调制电压v
q
获得并网逆变器在αβ两相静止坐标系中的输出调制电压v
α
和v
β
;
[0050]
对输出调制电压v
α
和v
β
进行脉冲宽度调制,获得并网逆变器的三相输出电压。
[0051]
第三方面,提供一种并网逆变器,包括:
[0052]
存储器;
[0053]
处理器;
[0054]
其中,存储器中存储有可被处理器执行的应用程序,用于使得处理器执行如上任一项所述的并网逆变器的功率控制方法。
[0055]
第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述的并网逆变器的功率控制方法。
[0056]
本方案的有益效果如下:
[0057]
本方法实施于两相静止坐标系中,可在无需锁相环和旋转坐标变换的条件下,实现对并网逆变器的灵活控制,从而实现在不对称电压跌落下对并网逆变器输出无功功率和有功功率的灵活调节,具有实施便捷、控制简单、动态响应快等特点。同时本方法具有良好的动态响应与频率适应能力,可以根据外部要求,实现在负序电流和振荡有功/无功功率分量之间进行权衡,使并网逆变器具有灵活的并网特性。
附图说明
[0058]
为了更清楚地说明本方案的实施,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本方案的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0059]
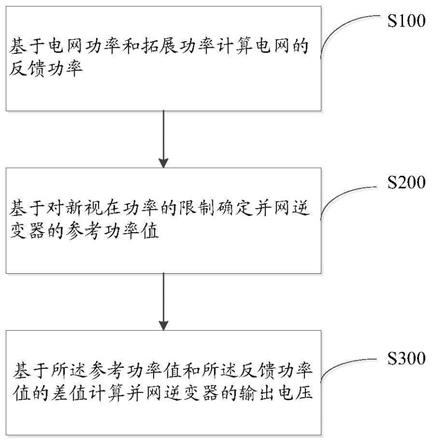
图1为并网逆变器功率控制方法流程图;
[0060]
图2为对并网逆变器的功率进行控制的框图;
[0061]
图3为并网逆变器功率控制装置示意图;
[0062]
图4为实施例并网逆变器的仿真模型的等效电路图;
[0063]
图5为实施例在不对称电压跌落下对并网逆变器功率控制的仿真实验结果。
具体实施方式
[0064]
下面将结合附图对本方案的实施方式作进一步地详细描述。显然,所描述的实施例仅是本方案的一部分实施例,而不是所有实施例的穷举。需要说明的是,在不冲突的情况下,本方案中的实施例及实施例中的特征可以相互组合。
[0065]
说明书和权利要求书及上述附图中的术语“第一”、“第二”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的实施例能够以除了在这里图示或描述的内容以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备,不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0066]
应当理解,本文中使用的术语“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
[0067]
取决于语境,如在此所使用的词语“如果”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”或“响应于检测”。类似地,取决于语境,短语“如果确定”或“如果检测(陈述的条件或事件)”可以被解释成为“当确定时”或“响应于确定”或“当检测(陈述的条件或事件)时”或“响应于检测(陈述的条件或事件)”。
[0068]
申请人经过研究,发现引入可调参数将按经典方式计算的电网功率与本方案定义的拓展功率联系起来,并引入比例积分加谐振(proportional
‑
integral
‑
resonant controller,pir)控制器可以实现对并网逆变器有功功率和无功功率的跟踪及消除二倍频功率振荡,从而可以根据外部要求在负序电流和二倍频功率振荡之间进行权衡。此外,申请人还设计了包含可调参数和电压不平衡因数的功率限制器,可以保证并网逆变器在各种不对称电压跌落情况下将最大功率注入电网,而不会使相电流超过其阈值。
[0069]
为了方便研究,通过克拉克变换,把abc三相静止坐标系下的物理量变换为αβ两相静止坐标系下的物理量,在此基础上,提出对并网逆变器的功率控制方法。
[0070]
如图1所示,该方法包括:
[0071]
s100,基于电网功率和拓展功率计算电网的反馈功率;
[0072]
电网功率包括电网有功功率p和电网无功功率q;根据瞬时功率理论,有功功率p和无功功率q如式(3)所示,
[0073][0074]
式(3)中u
gαβ
为αβ两相静止坐标系中电网电压的向量表示,i
αβ
是αβ两相静止坐标系中电网电流的向量表示,u
gαβ
=u
gα
+ju
gβ
,i
αβ
=i
α
+ji
β
,“*”表示复数的共轭,j是虚数单位;u
gα
、u
gβ
为vsi在αβ两相静止坐标系中的电网电压,
[0075]
vsi在αβ两相静止坐标系中的电网电压u
gα
、u
gβ
表示为如式(1
‑
1)所示,
[0076][0077]
式(1
‑
1)为利用克拉克变换把abc三相静止坐标系下的三相电压变换为αβ两相静止坐标系下的电网电压表达式,u
ga
、u
gb
、u
gc
为vsi网侧的电网三相电压,
[0078]
如图2所示,vsi网侧的三相电压、电流瞬时值通过传感器采集得到,u
ga
、u
gb
、u
gc
、i
a
、i
b
、i
c
分别表示采集得到的vsi网侧三相电压、三相电流瞬时值,
[0079]
vsi网侧三相电压、三相电流瞬时值之间的关系如式(1)所示,
[0080][0081]
式(1)中,v
a
、v
b
、v
c
分别为vsi输出三相电压,l为每相进线电抗器的电感,r为包括电抗器电阻在内的每相线路电阻;
[0082]
通过克拉克变换,在αβ两相静止坐标系中,式(1)可表示为式(2),
[0083][0084]
式(2)中,i
α
、i
β
为vsi在αβ两相静止坐标系中的输出电流,v
α
、v
β
为vsi在αβ两相静止坐标系中的输出调制电压,v
α
在α轴上,v
β
在β轴上;
[0085]
当发生不对称电压跌落时,如式(5)所示可把电压、电流分解为正序和负序分量,
[0086][0087]
式(5)中,u
gα
、u
gβ
为vsi在αβ两相静止坐标系中的电网电压,i
α
、i
β
为vsi在αβ两相静止坐标系中的输出电流;
[0088]
正负序分量的时域表达式如式(6)和式(7)所示,
[0089][0090][0091]
式(6)和(7)中,u
g+
、u
g
‑
和i
g+
、i
g
‑
分别为正负序电压、电流的幅值,θ
u+
、θ
u
‑
和θ
+
、θ
‑
分别为正负序电压、电流的初相角,ω为电网电压的角频率;
[0092]
根据式(3)和式(5),将电网有功功率和无功功率如式(8)所示表示为直流分量和振荡分量之和,
[0093][0094]
式(8)中,p表示电网有功功率,p
cl0
表示电网有功功率的直流分量,p
cli2
表示由正序电压和负序电流引起的电网有功功率二倍频分量,p
clu2
表示由负序电压和正序电流引起的电网有功功率二倍频分量,q表示电网无功功率,q
cl0
表示电网无功功率的直流分量,q
cli2
表示由正序电压和负序电流引起的电网无功功率二倍频分量,q
clu2
表示由负序电压和正序电流引起的电网无功功率二倍频分量;
[0095]
式(8)中,
[0096]
[0097][0098]
用延迟四分之一个周期的电压与电流作乘积计算得到拓展的有功功率和拓展的无功功率,拓展的有功功率和无功功率如式(12)所示,
[0099][0100]
式(12)中,表示αβ坐标系下延迟四分之一个周期的电压向量的共轭,“*”表示复数的共轭,即
[0101]
式(i)中u
′
gα+
、u
′
gα
‑
、u
′
gβ+
和u
′
gβ
‑
如式(11)所示
[0102][0103]
i
αβ
表示αβ两相静止坐标系中电网电流向量,即i
αβ
=i
α
+ji
β
,i
α
、i
β
见式
[0104]
(5)和式(7)p
ex
表示拓展有功功率,p
ex0
表示拓展有功功率的直流分量,p
exi2
表示由正序电压和负序电流引起的拓展有功功率二倍频分量,p
exu2
表示由负序电压和正序电流引起的拓展有功功率二倍频分量,q
ex
表示拓展无功功率,q
ex0
表示拓展无功功率的直流分量,q
exi2
表示由正序电压和负序电流引起的拓展无功功率二倍频分量,q
exu2
表示由负序电压和正序电流引起的拓展无功功率二倍频分量,
[0105]
式(12)中,
[0106][0107][0108]
引入可调参数将按经典方式计算的电网功率与本方案定义的拓展功率联系起来,
并引入比例积分加谐振(proportional
‑
integral
‑
resonant controller,pir)控制器,实现对并网逆变器有功功率和无功功率的跟踪及消除二倍频功率振荡,从而可以根据外部要求在负序电流和二倍频功率振荡之间进行权衡。
[0109]
如式(4)所示,计算电网有功功率和无功功率的变化率,
[0110][0111]
引入αβ坐标系下的正负序电压表示电网有功功率和无功功率的变化率,
[0112]
如式(11)所示,αβ坐标系下的正负序电压表示及关系如下,
[0113][0114]
将式(2)、(3)、(11)、(13)、(14)代入式(4)得出如式(15)所示的电网有功功率和无功功率的变化率,
[0115][0116]
式(15)中,u
g
为电网电压幅值,u
gα
、u
gβ
为vsi在αβ两相静止坐标系中的电网电压;v
p
表示并网逆变器的有功调制电压,v
q
表示并网逆变器的无功调制电压;以v
′
p
、v
′
q
分别作为式(15)中分别作为式(15)中表示的电网有功功率和无功功率的变化率经拉普拉斯变换后的表达式;求出v
′
p
、v
′
q
(或)后通过式(15),可以求得αβ坐标系中功率调制电压v
p
和v
q
;以g(s)表示功率控制器的传递函数,p
fb
表示电网有功功率的反馈功率,q
fb
表示电网无功功率的反馈功率,p
ref
表示vsi的参考有功功率,q
ref
表示vsi的参考无功功率,得出式(17),
[0117][0118]
引入可调参数λ将按经典方式计算的电网功率与本方案定义的拓展功率联系起来,获得如式(19)所示的用可调参数λ表示的式(17)中的反馈功率,可调参数λ∈[0,1],
[0119][0120]
在基于电网功率和拓展功率计算获得反馈功率后,进一步分析反馈功率与功率控制器的传递函数的关系,
[0121]
根据式(9)和(13)、式(10)和(14)得出式(18),
[0122][0123]
从式(18)看出,由负序电流和正序电压引起的电网功率和拓展功率的振荡功率分量相等,而由正序电流和负序电压引起的振荡功率分量相反;
[0124]
由于在式(8)中将电网功率表示为直流分量和振荡分量之和,在式(19)中反馈功率用带有可调参数的电网功率和拓展功率表示,因此得出反馈功率可由直流分量和二倍频的振荡分量组成;又因为已知功率控制器是既能调节直流分量,也能消除二倍频的振荡分量,所以,可以采用带有截止频率ω
c
的pir控制器作为功率控制器,由于pir控制器可以消除二倍于电网频率的稳态误差,因此可以通过设定特定的负序电流使振荡分量为0,把式(18)代入式(19)得如式(21)所示的控制方程
[0125][0126]
把式(9)、式(10)代入式(21),得到如式(22)所示的用可调参数λ表示的负序电流和如式(23)所示的用可调参数λ表示的初相角表达式,
[0127][0128][0129]
由式(22)和(23)可以看出,只要注入适当的负序电流,而无需注入三阶谐波电流,便可使vsi的输出电流保持高度接近正弦波;
[0130]
因此,本方法中基于电网功率和拓展功率计算得到的反馈功率表明无需任何功率补偿即可实现对并网逆变器的输出功率的调节,该调节通过引入可调参数λ实现,因此本方法可以根据外部要求在负序电流和有功/无功的振荡分量之间确定优先级,并且功率调节中所有计算均在静止坐标系中进行,无需锁相环及park变换。
[0131]
根据前面的论述,当采用带有截止频率ω
c
的pir控制器作为功率控制器时,式(17)中的功率控制器传递函数g(s)可以表示为如式(20)所示;
[0132][0133]
式(20)中,k
p
是pir控制器比例环节的比例系数,k
i
是pir控制器积分环节的积分系数,k
r
为pir控制器谐振环节的积分系数,ω为电网角频率。
[0134]
s200,基于对新视在功率的限制确定并网逆变器的参考功率值;
[0135]
vsi的参考功率包括vsi的参考有功功率和参考无功功率;
[0136]
在电网电压跌落时,电流有可能超过设定的阈值,使过电流保护跳闸,因此需要限制不对称电压跌落下的视在功率。
[0137]
本方法定义一个具有新的计算方法的视在功率并将其称为新视在功率(new apparent power,nap),本方法中的新视在功率为单位功率因数下有功功率和零功率因数下无功功率中的最小值,即如式(24)所示的新视在功率表达式,
[0138][0139]
根据式(22)、(23)对p
cl0
和q
cl0
进行推导,得到λ∈[0,1]时的表达式如式(25)所示,
[0140][0141]
式(25)中k
pn
为电压不平衡因数,k
pn
=u
g
‑
/u
g+
,
[0142]
因此,式(24)可表示为,
[0143][0144]
当正序和负序电流矢量同向时,会出现最大电流矢量与a(或b、c)轴重合,则a(或b、c)相的最大峰值电流i
peak
等于此时的电流矢量幅值i
max
,如式(27)所示,
[0145]
i
peak
=i
max
=i
+
+i
‑
=(1+|1
‑
2λ|k
pn
)i
+
≤i
th
ꢀꢀꢀ
(27),
[0146]
式(27)中,i
th
是标幺值下的安全电流阈值;根据式(26)和(27)可得新视在功率的限制值如式(28)所示,
[0147][0148]
式(28)表示对新视在功率的限制,该限制值式(28)表示对新视在功率的限制,该限制值即
[0149]
在电压跌落时,会要求vsi提供支撑电网的功能,一般优先注入无功功率,此时式(17)中的参考无功功率q
ref
的表达式如式(29)所示,
[0150][0151]
式中,q
max
为正序电压下vsi的最大输出无功功率,在恶劣条件下,应将vsi的全部容量分配给无功功率,因此应将vsi提供的最大功率设置为apl,即q
max
=apl;若无特殊说明,比例系数k
q
取2。再根据式(29)得到vsi的最大允许有功功率p
max
,p
max
的表达式如式(30)所示,
[0152][0153]
在不对称电压跌落期间,始终将p
max
与vsi的参考有功功率p
ref
进行比较,若p
max
>p
ref
则可以注入设定的vsi参考有功功率,否则只能注入最大有功功率p
max
,式(17)中的参考
有功功率p
ref
的表达式如式(31)所示,
[0154][0155]
s300,基于所述参考功率值和所述反馈功率值的差值确定并网逆变器的三相输出电压;
[0156]
如图2所示,在根据式(19)获得反馈功率及根据式(29)/(30)获得vsi的参考功率值后,依据式(15)和式(16)获得vsi在αβ两相静止坐标系中的输出调制电压v
α
和v
β
,经脉冲宽度调制,向电网输出所需的三相电压。
[0157][0158]
式(16)中,v
α
表示并网逆变器在αβ两相静止坐标系中的α轴上的输出调制电压,v
β
表示并网逆变器在αβ两相静止坐标系中的β轴上的输出调制电压;v
p
表示并网逆变器的有功调制电压,v
q
表示并网逆变器的无功调制电压;
[0159][0160]
式(16)表示了v
α
、v
β
和v
p
、v
q
之间的转换关系,当根据式(16)把v
p
、v
q
转换为v
α
、v
β
,两相αβ坐标系下的v
α
及v
β
通过如式(16
‑
1)所示的克拉克逆变换变为三相abc坐标系下的三相电压v
a
、v
b
、v
c
,再通过脉冲宽度调制(pwm)技术把v
a
、v
b
、v
c
变换为vsi的三相输出电压,所以,通过式(16)获得v
α
、v
β
就相当于获取了能控制逆变器输出的开关,从而实现对并网逆变器功率的灵活控制。且本方法的整个控制是在αβ两相静止坐标系中实施的,因此不依赖于锁相环与旋转坐标变换。
[0161]
如图3所示,一种并网逆变器的功率控制装置1,该装置包括:
[0162]
反馈功率计算单元10,基于电网功率和拓展功率计算电网的反馈功率;
[0163]
参考功率确定单元20,基于对新视在功率的限制确定并网逆变器的参考功率值;
[0164]
调节单元30,基于所述参考功率值和所述反馈功率值的差值确定并网逆变器的三相输出电压;
[0165]
其中,所述电网功率包括电网有功功率和电网无功功率;
[0166]
所述参考功率包括并网逆变器的参考有功功率和参考无功功率;
[0167]
所述拓展功率为用延迟四分之一个周期的电网电压向量的共轭与电网电流的乘积值;
[0168]
所述新视在功率为单位功率因数下电网有功功率和零功率因数下电网无功功率中的最小值。
[0169]
本方案还提供一种并网逆变器,包括存储器和处理器;
[0170]
其中,存储器中存储有可被处理器执行的应用程序,用于使得处理器执行本方案的并网逆变器的功率控制方法。存储器可以是计算机可读存储介质,其可以采用便携式紧凑盘只读存储器(cd
‑
rom)并包括程序代码,并可以在设备,例如个人电脑上运行。然而,本发明的程序产品不限于此,在本文件中,可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。
[0171]
所述程序产品可以采用一个或多个可读介质的任意组合。可读介质可以是可读信号介质或者可读存储介质。可读存储介质例如可以为但不限于电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑盘只读存储器(cd
‑
rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。
[0172]
计算机可读存储介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了可读程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。可读信号介质还可以是可读存储介质以外的任何可读介质,该可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。
[0173]
计算机可读存储介质上包含的程序代码可以用任何适当的介质传输,包括但不限于无线、有线、光缆、rf等等,或者上述的任意合适的组合。
[0174]
可以以一种或多种程序设计语言的任意组合来编写用于执行本方案操作的程序代码,所述程序设计语言包括面向对象的程序设计语言
‑
诸如java、c++等,还包括常规的过程式程序设计语言
‑
诸如"c"语言或类似的程序设计语言。程序代码可以完全地在用户计算设备上执行、部分在用户计算设备上部分在远程计算设备上执行、或者完全在远程计算设备或服务器上执行。在涉及远程计算设备的情形中,远程计算设备可以通过任意种类的网络,包括局域网(lan)或广域网(wan),连接到用户计算设备,或者,可以连接到外部计算设备(例如利用因特网服务提供商来通过因特网连接)。
[0175]
下面结合如图4的仿真模型,对本方案进行说明。利用matlab/simulink搭建主电路如图4所示的仿真模型。设定电网电压频率为50hz,逆变器(vsi)的参考有功功率p
ref
=1.0,vsi的参考无功功率q
ref
=0。vsi直流侧电压源为1.5kv,0.5s时使a相和c相电压跌落为原来的0.5倍,可调参数λ在1~2s内由0匀速上升至1;图5中表示的是上述情况下的仿真结果。
[0176]
从图中看到,在1s时,λ=0,vsi的输出三相电流i
abc
不平衡,含有负序分量,vsi输出的无功功率q含二倍频振荡分量,而有功功率p维持恒定值0.4(p.u.),即此时可控制有功功率恒定,即λ取0可消除vsi输出有功功率的二倍频分量;在1.5s时,λ=0.5,有功功率和无功功率均含二倍频振荡分量,而输出电流i
abc
三相对称,不含负序电流,即此时可控制输出电流三相对称,即λ取0.5可使vsi输出电流保持高度接近正弦波;在2s时,λ=1,输出电流i
abc
不平衡,含负序分量,有功功率含二倍频振荡分量,而无功功率q维持恒定值0.33(p.u.),即此时可控制无功功率恒定,即λ取1可消除vsi输出无功功率的二倍频分量。
[0177]
可见,通过适当调节式(20)中k
p
、k
i
和k
r
的数值,便可以调节反馈功率的直流分量,也可以消除二倍频率的振荡分量;只要设置适当的k
p
、k
i
和k
r
数值,根据外部要求设置适当
的λ值,便可以使vsi输出电流保持高度接近正弦波,也可以消除vsi输出有功或者无功功率中的二倍频分量。
[0178][0179]
可见,本方案所提出的并网逆变器在不平衡电网电压下的功率控制策略可以通过调节λ的大小,根据外部要求,实现在负序电流和振荡有功/无功功率分量之间进行权衡,从而使vsi具有灵活的并网特性。
[0180]
背景技术中参考文献如下:
[0181]
1.h.nian,y.shen,h.yang,and y.quan,“flexible grid connection technique of voltage
‑
source inverter under unbalanced grid conditions based on direct power control,”ieee trans.ind.appl.,vol.51,no.5,pp.4041
‑
4050,sep
‑
oct,2015.
[0182]
2.d.sun,x.wang,h.nian,and z.q.zhu,“a sliding
‑
mode direct power control strategy for dfig under both balanced and unbalanced grid conditions using extended active power,”ieee trans.power electron.,vol.33,no.2,pp.1313
‑
1322,feb,2017.
[0183]
3.y.h.gui,c.kim,c.c.chung,j.m.guerrero,y.j.guan,and j.c.vasquez,“improved direct power control for grid
‑
connected voltage source converters,”ieee trans.ind.electron.,vol.65,no.10,pp.8041
‑
8051,oct,2018.
[0184]
4.y.h.gui,m.s.li,j.h.lu,s.golestan,j.m.guerrero,and j.c.vasquez,“a voltage modulated dpc approach for three
‑
phase pwm rectifier,”ieee trans.ind.electron.,vol.65,no.10,pp.7612
‑
7619,oct,2018.
[0185]
5.h.d.tafti,a.i.maswood,g.konstantinou,j.pou,and p.acuna,“active/reactive power control of photovoltaic grid
‑
tied inverters with peak current limitation and zero active power oscillation during unbalanced voltage sags,”iet power electron.,vol.11,no.6,pp.1066
‑
1073,jun,2018.
[0186]
6.b.mahamedi,m.eskandari,j.e.fletcher,and j.zhu,“sequence
‑
based control strategy with current limiting for the fault ride
‑
through of inverter
‑
interfaced distributed generators,”ieee trans.sustain.energy,vol.11,no.1,pp.165
‑
174,jan,2020.
[0187]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1