带缓速器的旋转电机的制作方法
1.本发明涉及一种能用作缓速器的旋转电机。
背景技术:
2.缓速器(retarder)是车辆等中为了辅助主制动器而搭载的辅助制动器。例如,在作为电动车辆的卡车/公共汽车中,有时会装接缓速器以使得即使在因电池的soc为满充电而无法对电池进行再生充电的情况下也会在下坡路上产生减速力。缓速器有多种,除了流体式缓速器、永磁铁式缓速器等以外,还可使用电磁式缓速器。
3.日本特开平11-308898中记载了在交流发电机陷入功率不足时,将电磁式的缓速器用作发电机。在该缓速器中,在固定于轴的转子的外周设置有定子,在定子的外周设置有缓速器转子。在定子上,在转子侧卷绕有励磁电枢线圈,在缓速器转子侧卷绕有磁极线圈。在励磁电枢线圈所产生的交流电压流过磁极线圈的情况下,作为缓速器发挥作用,在该交流电压被取出至外部的情况下,作为发电机发挥作用。
4.在日本特开平11-308898中记载的缓速器中,在定子的内周面和外周面分别设有线圈,因此体格变大。
技术实现要素:
5.本发明的目的在于谋求带缓速器的旋转电机的小型化。
6.本发明的方案的带缓速器的旋转电机具备:转子,沿周向周期性地设有磁极,并沿周向旋转;定子,沿周向周期性地设有卷绕有线圈的齿,并被配置为该齿的一端面向所述转子;缓速器转子,沿周向连续地设有磁性构件,并被配置为该磁性构件面向所述定子的所述齿的另一端,所述缓速器转子与所述转子一体地旋转;转子
‑
定子间极靴(pole piece)部,沿周向周期性地设有极靴,并被配置在所述转子与所述定子之间;定子
‑
缓速器转子间极靴部,沿周向周期性地设有极靴,并被配置在所述定子与所述缓速器转子之间;以及移动机构,使所述转子
‑
定子间极靴部和所述定子
‑
缓速器转子间极靴部沿周向移动,控制出入于所述齿的磁通的流动,所述移动机构将所述转子
‑
定子间极靴和所述定子
‑
缓速器转子间极靴切换地配置在马达或发电机用的第一位置和缓速器用的第二位置,所述第一位置是在所述定子与所述转子之间产生由所述磁通引发的相互作用的位置,所述第二位置是在所述定子与所述缓速器转子之间产生由所述磁通引发的相互作用的位置。
7.在本发明的一个方案中,该带缓速器的旋转电机连接于车辆的驱动轴,在所述车辆的车速小于设定车速值的情况下,所述移动机构将所述转子
‑
定子间极靴部和所述定子
‑
缓速器转子间极靴部配置在所述第一位置,在所述车辆的车速为所述设定车速值以上的情况下,所述移动机构将所述转子
‑
定子间极靴部和所述定子
‑
缓速器转子间极靴部配置在所述第二位置。
8.在本发明的一个方案中,该带缓速器的旋转电机连接于电池,该电池在与该带缓速器的旋转电机之间进行供电和再生充电,在所述电池的soc小于设定soc值的情况下,所
述移动机构将所述转子
‑
定子间极靴部和所述定子
‑
缓速器转子间极靴部配置在所述第一位置,在所述电池的soc为所述设定soc值以上的情况下,所述移动机构将所述转子
‑
定子间极靴部和所述定子
‑
缓速器转子间极靴部配置在所述第二位置。
9.根据本发明的方案,能对转子和缓速器转子应用共用的定子,因此无需设置缓速器转子用的线圈,能实现缩小了体格的带缓速器的旋转电机。
附图说明
10.以下,参照附图,对本发明的示例性实施例的特征、优点以及技术和工业意义进行说明,其中,相同的附图标记表示相同的元件,其中:
11.图1是表示实施方式的车辆的概略构成的图。
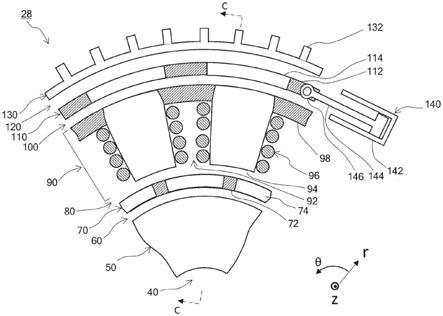
12.图2是用与旋转轴垂直的平面来剖切带缓速器的旋转电机的端视图。
13.图3是用沿着旋转轴的平面来剖切带缓速器的旋转电机的端视图。
14.图4是示意地表示作为缓速器进行工作的情况下的磁通的流动的图。
15.图5是示意地表示作为马达或发电机进行工作的情况下的磁通的流动的图。
16.图6是表示带缓速器的旋转电机的控制例的流程图。
17.图7是表示带缓速器的旋转电机的另一控制例的流程图。
18.图8是表示带缓速器的旋转电机的另一构成例的图。
19.图9是表示带缓速器的旋转电机的又一构成例的图。
20.图10是表示轴向间隙型带缓速器的旋转电机的构成例的图。
21.图11是表示轴向间隙型带缓速器的旋转电机的另一构成例的图。
具体实施方式
22.(1)构成
23.图1是对实施方式的车辆10的构成进行说明的图。在图1中,将车辆10假定为公共汽车和电动车辆。在此,电动车辆是指由马达驱动的车辆。除了马达以外,由内燃机驱动的混合动力车辆也包含于电动车辆。车辆10设有车体12、前轮14、后轮16。车辆10设有换挡杆20、加速踏板22、制动踏板24、控制部26、带缓速器的旋转电机28、驱动轴30、电池32、soc传感器34、速度传感器36。
24.换挡杆20、加速踏板22、制动踏板24是供车辆10的驾驶员的驾驶操作用而设置的操作装置。换挡杆20为了指示车辆的行驶形态而设置。换挡杆20被配置为例如能指示前进、后退、驻车等。也可以是,通过换挡杆20,能在前进行驶过程中指示使用通常使用的齿轮(所谓的前进挡)或者使用低挡齿轮(是高转矩,但不适于高速行驶)进行。此外,也可以是,通过换挡杆20,能指示例如是否主动进行再生充电。
25.加速踏板22是通过驾驶员用脚踩踏来控制车辆10的驱动力和车辆的速度的操作装置。设定为:在没有踩踏加速踏板22的情况下,车辆10不承受驱动力或承受微弱的驱动力而慢速行进(所谓的缓慢行驶)。在踩踏了加速踏板22的情况下,车辆10根据踩踏量的大小来使驱动力增加而加速。
26.制动踏板24是通过驾驶员用脚踩踏来进行车辆10的减速的操作装置。在踩踏了制动踏板24的情况下,车辆10的减速主要由省略了图示的主制动器进行。主制动器例如被配
置为利用油压或气压来推动制动垫块使其抵接于设在前轮14或后轮16的制动盘或制动鼓。由此,车辆10被施加摩擦力而减速。在踩踏了制动踏板24的情况下,车辆10根据踩踏量的大小而减速。在不踩踏制动踏板24的情况下,主制动器不工作。
27.一般而言,当主制动器被长时间施加高摩擦力时,制动垫块以及制动盘或制动鼓会发热,使制动性能降低。因此,车辆10使用带缓速器的旋转电机28来进行辅助性减速。
28.控制部26是通过os(operating system:操作系统)、应用程序等软件来控制包含处理器和存储器的计算机硬件从而进行工作的装置。控制部26例如可使用搭载于车辆10的一个或多个ecu(electric control unit:电子控制单元)来实现。控制部26对车辆10的行驶、照明、空调等各种元件进行控制,在本说明书中,以与实施方式密切相关的部分为中心进行说明。
29.控制部26被输入来自换挡杆20、加速踏板22、制动踏板24的操作信号。控制部26还被输入来自soc传感器34、速度传感器36的检测信号。然后,控制部26基于这些信号来进行带缓速器的旋转电机28的控制。控制的详情在后文加以说明。
30.带缓速器的旋转电机28是能驱动车辆10的旋转电机,具备缓速器的功能。车辆10搭载有一个或多个带缓速器的旋转电机28。车辆10中还可以设有不具备一个或多个缓速器的功能的车辆驱动用的旋转电机。带缓速器的旋转电机28具备旋转的轴,轴连接于车辆10的驱动轴30。带缓速器的旋转电机28接受控制部26的控制而进行工作。
31.在此,对术语进行说明。在车辆10中,缓速器是指用于辅助车辆10的主制动器而搭载的辅助制动器。不过,带缓速器的旋转电机28也可用于车辆10以外的情形。在该情况下,缓速器也可以不用作辅助制动器而用作主制动器。此外,旋转电机是指具有马达和发电机中的一方或双方的功能的装置。在实施方式中,如下文所述,带缓速器的旋转电机28可作为缓速器、马达以及发电机这三种装置进行工作。
32.驱动轴30是传递使车辆10的前轮14或后轮16的旋转加速或减速的转矩的轴。驱动轴30直接或经由齿轮连接于带缓速器的旋转电机28的轴。
33.电池32是向带缓速器的旋转电机28供电的装置。电池32除了经由外部电源被充电以外,还可以利用来自带缓速器的旋转电机28的再生电力而被再生充电。
34.soc传感器34是检测电池32的荷电状态(soc:state of charge的缩写,指充电状态)的传感器。电池32中,在soc超过了设定的上限值的情况下判定为满充电,在低于设定的下限值的情况下判定为空电。soc传感器34的检测信号被发送至控制部26。
35.速度传感器36是测定车辆10的速度的传感器。速度传感器36的检测信号被发送至控制部26。
36.需要说明的是,在以上的说明中,假定车辆10由搭乘于车辆10的驾驶员来进行驾驶操作。但是,也可以是,车辆10由位于远程位置的驾驶员来进行操作。此外,车辆10也可以具备不由驾驶员操作而由计算机进行操作的自动驾驶模式。在自动驾驶模式中,代替来自换挡杆20、加速踏板22、制动踏板24的操作信号,由进行自动驾驶的判断的计算机向控制部26发送同样的操作信号。
37.接着,参照图2和图3,对带缓速器的旋转电机28的构造进行说明。图2是用与旋转轴垂直的平面来剖切带缓速器的旋转电机28的端面图。不过,在周向上仅图示出了局部。此外,图3是用包含旋转轴的平面来剖切带缓速器的旋转电机28的端面图。不过,隔着旋转轴
的一方侧省略了图示。图2是图3中的dd向视图,图3是图2中的cc向视图。
38.图2和图3中图示出了(r,θ,z)圆筒坐标系。在此,r坐标方向是指从旋转轴垂直地朝向外侧的方向,θ坐标方向是指旋转的方向,z坐标方向是指旋转轴的方向(以下的图也同样如此)。在本实施方式中,有时将r坐标的正方向称为朝外、外侧等。此外,有时将r坐标的负方向称为朝内或内侧等。还请注意,有时不特别区分θ坐标的正负而称为周向,朝θ坐标的正方向和负方向都能进行旋转。
39.带缓速器的旋转电机28具备:轴40、转子50、转子
‑
定子间极靴部70、定子90、定子
‑
缓速器转子间极靴部110、缓速器转子130、移动机构140以及壳体150。
40.轴40是沿着旋转轴42延伸的构件。如图3所示,轴40经由连接部46连结有位于旋转轴附近的芯构件44和被配置为包围芯构件44的圆筒构件48。轴40形成为可旋转,在z坐标的负方向侧以能传递转矩的方式与车辆10的驱动轴30结合。
41.转子50是与轴40结合而与轴40一体地旋转的圆筒形的部件。在实施方式中,假定转子50包含层叠有许多薄电磁钢板的转子芯和插入至转子芯的磁铁孔的永磁铁。永磁铁设置为沿周向周期性地形成磁极。
42.转子
‑
定子间极靴部70是隔着空隙60设置在转子50的外侧的部件。转子
‑
定子间极靴部70形成为包围转子50的r坐标方向的外表面的圆筒形,与旋转轴42同轴地配置。转子
‑
定子间极靴部70沿周向周期性地配置有由低导磁率的构件构成的连接部72和由高导磁率的磁性构件构成的极靴74。在实施方式中,假定连接部72由铝形成,极靴74由层叠的电磁钢板形成。例如,通过使铝流入设置有多个极靴74的铸模中使其成型,从而能形成转子
‑
定子间极靴部70。如图3所示,转子
‑
定子间极靴部70的z坐标的一端侧(负向侧)成为由铝形成的脚部76,经由轴承164被支承于壳体150。此外,转子
‑
定子间极靴部70的z坐标的另一端侧(正向侧)成为由铝形成的桥状的连接部78,与定子
‑
缓速器转子间极靴部110连接。
43.定子90是隔着空隙80设置在转子
‑
定子间极靴部70的外侧的部件。定子90形成为包围转子
‑
定子间极靴部70的r坐标方向的外表面的圆筒形,与旋转轴42同轴地配置。定子90具备槽92、齿94、线圈96以及连接部98。其中,齿94和连接部98是构成定子90的骨架的部位,也可称为定子芯。齿94使用高导磁率的磁性构件来形成,在实施方式中假定将电磁钢板层叠而形成。另一方面,连接部98使用低导磁率的构件来形成,在实施方式中假定由铝形成。该定子芯也可通过将齿94设置于铸模并使铝流入来成型。
44.齿94沿周向周期性地配置,在r坐标方向上从内周面(面朝转子50的面)延伸至外周面(面朝缓速器转子130的面)。在定子90的内周面侧,在齿94之间设有被称为槽92的槽。在齿94上,利用槽92的空间卷绕有线圈96。在定子90的外周面侧,在齿94之间设有上述的连接部98。根据该构造,定子90内处于磁通实质上不在相邻的齿94之间流动的(被磁绝缘的)状态。
45.定子
‑
缓速器转子间极靴部110隔着空隙100设于定子90的外侧。定子
‑
缓速器转子间极靴部110形成为包围定子90的r坐标方向的外表面的圆筒形,与旋转轴42同轴地配置。定子
‑
缓速器转子间极靴部110沿周向周期性地配置有由低导磁率的构件构成的连接部112和由高导磁率的磁性构件构成的极靴114。在实施方式中,假定连接部112由铝形成,极靴114由层叠的电磁钢板形成,可与转子
‑
定子间极靴部70同样地制造。如上所述,定子
‑
缓速器转子间极靴部110与转子
‑
定子间极靴部70被桥状的连接部78连接。
46.缓速器转子130是隔着空隙120设置在定子
‑
缓速器转子间极靴部110的外侧的部件。缓速器转子130形成为包围定子
‑
缓速器转子间极靴部110的r坐标方向的外表面的圆筒形,与旋转轴42同轴地配置。缓速器转子130是在整个周向上连续地设有具有高导磁率且具有导电性的磁性构件而形成的部件。在实施方式中,假定缓速器转子130由铁制成。在磁通流过铁的情况下,会感应出大的涡电流,因电阻而产生焦耳热。在缓速器转子130的外周面设有高效地散热的作为突起部的翅片132。缓速器转子130与轴40由桥状的连接部136连接。因此,缓速器转子130与轴40和转子50一体地旋转。
47.移动机构140是设于定子
‑
缓速器转子间极靴部110的部件。移动机构140具备气缸142和活塞144。气缸142固定于壳体150等。此外,活塞144设置在气缸142内,可在沿着气缸的轴向的方向上往复运动。活塞144由未图示的致动器(例如,电磁铁、小型马达、气压等)移动,在移动目的地的位置被固定。活塞144的顶端部146被装配在定子
‑
缓速器转子间极靴部110的连接部112。由此,移动机构140能使定子
‑
缓速器转子间极靴部110沿周向小幅移动并固定在移动后的位置。此时,由连接部78连接的转子
‑
定子间极靴部70也以与定子
‑
缓速器转子间极靴部110相同的旋转角度沿周向移动并被固定。
48.壳体150是构成带缓速器的旋转电机28的外表面的主要构件,被固定于车辆10。请注意,在带缓速器的旋转电机28中,除了壳体150以外,有时还设有包围外表面的部件。在壳体150上设有臂152。臂152延伸至轴40的内部,经由轴承160、162将轴40的圆筒构件48支撑为可旋转。由此,轴40能在壳体150中的规定的位置围绕旋转轴42进行旋转。此外,壳体150经由轴承164将转子
‑
定子间极靴部70的脚部76支承为可旋转。因此,转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110能在壳体150中的规定的位置在旋转轴42的周围移动。
49.壳体150经由支承构件154来固定定子90。此外,在壳体150与缓速器转子130之间设有油封166。油封166防止对定子90以及转子50等进行冷却的油向外部流出。
50.(2)作为缓速器进行的工作
51.接着,参照图4和图5,对带缓速器的旋转电机28的工作进行说明。图4和图5是表示在图2所示的带缓速器的旋转电机28中转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110被移动机构140移动后配置在规定的位置的状态的图。在本说明书中,有时将图4所示的位置称为“第二位置”,将图5所示的位置称为“第一位置”。此外,在图4和图5中,将相邻的两个齿94称为齿94a、94b,将转子
‑
定子间极靴部70的相邻的三个极靴74称为极靴74a、74b、74c,将定子
‑
缓速器转子间极靴部110的相邻的三个极靴114称为极靴114a、114b、114c。
52.图4表示带缓速器的旋转电机28通过配置在第二位置的转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110而作为缓速器进行工作的状态。具体而言,在第二位置,转子
‑
定子间极靴部70的连接部72的周向的中心配置在与齿94的周向的中心相同的周向位置。此外,极靴74的周向的中心配置在与槽92的周向的中心相同的周向位置。不过,极靴74在周向上比连接部72长,因此极靴74的周向端延伸至比齿94的周向端靠周向的中心侧。换言之,在沿着r坐标方向观察的情况下,极靴74的周向端附近与齿94的周向端附近处于重叠的状态。此外,在第二位置,定子
‑
缓速器转子间极靴部110的连接部112的周向的中心配置在与定子90的连接部98的周向中心相同的周向位置,极靴114的周向中心配置在与齿94的周向中心相同的周向位置。
53.需要说明的是,在图4中,仅图示出了带缓速器的旋转电机28的θ方向的局部,但是
齿94沿周向配置的周期、转子
‑
定子间极靴部70中的极靴74沿周向配置的周期以及定子
‑
缓速器转子间极靴部110中的极靴114沿周向配置的周期设定为实质相同。因此,与图4同样,磁通也在未图示的部位中流动。
54.在此,考虑轴40、转子50以及缓速器转子130一体地旋转的状态。此时,通过从电池32供给的电力,电流在线圈96中流动。电流既可以是直流也可以是交流。
55.在图4所示的例子中,假定不论是在直流的情况下还是在交流的情况下,在相邻的两个齿94a、94b的线圈96中流动的电流都是逆向的(相位偏离180
°
)。图4中的粗虚线示意性地表示在第二位置实现的典型的三根磁通170a、170b、170c的流动。在齿94a中,磁通170a、170b从r坐标方向的正侧的端(缓速器转子130侧的端)向负侧的端(缓速器转子130侧的端)流动。磁通170a从齿94a的r坐标方向的负侧的端流出至空隙80,流入对面的转子
‑
定子间极靴部70的极靴74a。此外,磁通170b流入极靴74b。
56.流入极靴74b的磁通170b沿周向流过极靴74b,然后从r坐标方向的正侧的面流出至空隙80。就是说,磁通170b被控制为不向转子50侧流动。流出至空隙80的磁通170b从齿94b的r坐标方向的负侧的端流入齿94b内。同样地,磁通170c从极靴74c流入齿94b。
57.在齿94b中,磁通170b、170c从r坐标方向的负侧的端向r坐标方向的正侧的端流动。在齿94b中流动的磁通170b、170c的流向与在相邻的齿94a中流动的磁通170a、170b的流向相反。这一点与反方向的电流流向相邻的齿94a、94b的线圈96的情况相匹配。
58.从齿94b的r坐标方向的正侧的端流出至空隙100的磁通170b、170c流入对面的定子
‑
缓速器转子间极靴部110的极靴114b。然后,磁通170b、170c在r坐标方向上流过极靴114b,从r坐标方向的正侧的面流出至空隙120。流出的磁通170b、170c流入对面的缓速器转子130。
59.从缓速器转子130的r坐标方向的负侧的面流入的磁通170b沿周向流过缓速器转子130的内部。然后,磁通170b从缓速器转子130的r坐标方向的负侧的面流出至空隙120,穿过对面的定子
‑
缓速器转子间极靴部110的极靴114a和空隙100,从齿94a的r坐标方向的正侧的端流入齿94a内。同样地,磁通170a也从缓速器转子130穿过极靴114a流入齿94a。
60.如上所述,在第二位置,由线圈96产生的磁通170a、170b、170c的流动由转子
‑
定子间极靴部70的极靴74和定子
‑
缓速器转子间极靴部110的极靴114来控制。通过该控制,磁通170a、170b、170c不向转子50侧流动,在定子90与转子50之间不产生电磁学的相互作用。另一方面,磁通170a、170b、170c流向缓速器转子130,在定子90与缓速器转子130之间产生下文所述的电磁学的相互作用。
61.如上所述,转子
‑
定子间极靴部70、定子90以及定子
‑
缓速器转子间极靴部110固定于壳体150。另一方面,缓速器转子130与轴40和转子50呈一体。因此,在车辆10的行驶过程中,缓速器转子130与连结于驱动轴30的轴40一起以对应于车辆10的速度的旋转速度沿周向旋转。
62.通过旋转,缓速器转子130中产生磁通的经时变化,因此产生感应电流。然后,通过感应电流与磁通的相互作用,缓速器转子130承受与旋转方向相反的洛伦兹力。该洛伦兹力作为使缓速器转子130、轴40以及转子50的旋转停止的制动力发挥作用,进而以通过驱动轴30使车辆10减速的方式发挥作用。此外,通过磁通的变化,定子90也承受反作用力。
63.因在缓速器转子130内呈旋涡状流动,因此缓速器转子130中产生的感应电流有时
也被称为涡电流。涡电流会因缓速器转子130的电阻而成为焦耳热,加热缓速器转子130。所产生的热通过翅片132被高效地散热。
64.在以上所示的例子中,流向相邻的齿94的线圈96的电流是反向的。在该情况下,在各齿94中流动的磁通的大小(也就是磁通的绝对值)相等。实际上,可知在图4和图5中若忽略磁通的方向,则磁通以相同的模式流向各齿94。因此,向每个齿94的磁通的流动没有偏差,能在整周上均匀地控制磁通的流动。而且,能充分地减少向转子50侧漏出的磁通。不过,在以某种程度容许磁通的流动的紊乱的情况下,也可以以其他相位来提供向各齿94的线圈96流动的电流。作为一个例子,可举出使在θ方向上依次偏离120
°
相位的电流流向各齿94的方式。
65.(3)作为马达或发电机进行的工作
66.图5表示带缓速器的旋转电机28通过配置在第一位置的转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110而作为马达或者发电机进行工作的状态。在第一位置,转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110被配置为按照极靴74的周向上的配置周期(该配置周期与齿94的周向上的配置周期相同,并且与极靴114的周向上的配置周期也相同)的半周期量在周向上移动。
67.具体而言,在第一位置,转子
‑
定子间极靴部70的连接部72的周向的中心配置在与槽92的周向的中心相同的周向位置,极靴74的周向的中心配置在与齿94的周向的中心相同的周向位置。此外,在第一位置,定子
‑
缓速器转子间极靴部110的连接部112的周向的中心配置在与齿94的周向的中心相同的周向位置,极靴114的周向的中心配置在与槽92的周向的中心相同的周向位置。不过,极靴114比连接部112长,因此极靴114的周向端延伸至比齿94的周向端靠周向的中心侧。换言之,在沿着r坐标观察的情况下,极靴114的周向端附近与齿94的周向端附近处于重叠的状态。
68.接着,对磁通172a、l72b、172c的流动进行说明。从齿94b的r方向负侧的端流出至空隙80的磁通172a、172b穿过对面的转子
‑
定子间极靴部70的极靴74b,经由空隙60到达转子50。转子50中,虽然会受到转子50的磁极的影响,但在图5中仅图示了磁通172a、l72b、172c的流动。
69.然后,磁通172b从转子50流出至空隙60,穿过转子
‑
定子间极靴部70的极靴74流出至空隙80。进而,磁通172b从齿94b的r坐标方向的负侧的端流入齿94b,穿过齿94b内,从r坐标方向的正侧的端流出至空隙100。然后,磁通172b流入对面的定子
‑
缓速器转子间极靴部110的极靴114b,沿周向流过极靴114b后,从极靴114b流出至空隙100。流出至空隙100的磁通172b从对面的齿94a的r坐标方向的正侧的端流入齿94a。其他磁通172a、172c也同样如此。
70.如上所述,在第一位置,在齿94a、94b中流动的磁通172a、172b、172c通过转子
‑
定子间极靴部70的极靴74和定子
‑
缓速器转子间极靴部110的极靴114来控制流动。通过该控制,磁通172a、172b、172c向转子50侧流动。因此,定子90与转子50之间会如下所述产生电磁学的相互作用。另一方面,磁通172a、172b、172c不向缓速器转子130流动。因此,定子90与缓速器转子130之间不产生电磁学的相互作用。就是说,在第一位置,与第二位置不同,带缓速器的旋转电机28不作为缓速器进行工作。
71.在带缓速器的旋转电机28作为马达进行工作的情况下,根据转子50的磁极的旋转
角度而被控制的电流流向卷绕于齿94的线圈96,形成磁通172a、172b、172c。然后,通过与流出至转子50侧的磁通的相互作用,转子50旋转。
72.在图5所示的例子中,相位相差180
°
的交流电流流向相邻的齿94。随着该电流,磁通172a、172b从外侧向内侧流向齿94a,磁通172b和磁通172c从内侧向外侧流向相邻的齿94b。该相位关系与缓速器的情况相同,适于在整周上均匀地控制磁通的流动。而且,能充分地减少向缓速器转子130侧漏出的磁通。不过,在不重视效率的情况下,也可流过其他相位的电流。作为一个例子,可举出使在θ方向上依次偏离120
°
相位的交流电流流向各齿94的方式。
73.在第一位置,也可使带缓速器的旋转电机28作为发电机进行工作。在该情况下,图5所示的磁通172a、172b、172c由转子50的磁极产生。在与转子50一起旋转的情况下,磁通172a、172b、172c会在卷绕于齿94的线圈96中产生与磁通的经时变化对应的电动势,会流过电流。能通过使该电流流向电池32来对电池32进行再生充电。
74.如上述(1)、(2)以及该(3)所示,带缓速器的旋转电机28中,包含齿94和线圈96的定子90被共用于转子50和缓速器转子130。因此,能使带缓速器的旋转电机28的体格小型化。
75.(4)车辆中的有效利用
76.参照图6和图7,对车辆10中的带缓速器的旋转电机28的有效利用例进行说明。在带缓速器的旋转电机28作为缓速器进行工作的情况下,即使车辆10的电池32的soc为满充电的状态,也能在下坡路等路上使车辆10减速。另一方面,在电池32的soc低的状态下,使带缓速器的旋转电机28作为缓速器进行工作的话,由于电池32没被充电,因此电效率(称为电力消耗的效率)变差。因此,车辆10的控制部26进行兼顾制动确保和电效率提高的控制。
77.图6是表示带缓速器的旋转电机28的控制的一个方案的流程图。在该例子中,控制部26首先判断车辆10的加速踏板22是被踩踏着(接通)还是是没被踩踏(断开)(s10)。在被踩踏着的情况下,即在接收到加速请求的操作信号的情况下,控制部26控制移动机构140,将转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110配置在马达和发电机用的第一位置(s12)。在转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110一开始就被设定在第一位置的情况下,控制部26维持第一位置。然后,控制部26通过来自电池32的供电而使带缓速器的旋转电机28作为马达进行工作,驱动车辆10(s14)。
78.在没有踩踏加速踏板22的情况下,控制部26基于soc传感器34的测定值来判定电池32的soc是否比设定值(将该设定值称为设定soc值)高(s16)。设定soc值是决定是否容许电池32的再生充电的值。设定soc值例如可设为在外部充电时电池32被视为满充电的值。此外,例如也可设定为比被视为该满充电的值高一点的值或低一点的值。设定soc值也可以根据电池32的劣化或者目前的行驶环境(例如到目的地的距离、高低差)等而变化。
79.在soc比设定soc值低的情况(否的情况)下,控制部26判定是否有减速请求(s18)。减速请求是与使车辆10减速相关的操作信号。典型的是,减速请求是通过踩踏制动踏板24而发出的请求或者将换挡杆20从通常的行驶所用的齿轮切换至低挡的齿轮的请求。此外,有时通过切换至主动进行再生充电的驾驶模式而发出的请求也会浪费原本可用于行驶的能量,因此被处理为减速请求。
80.在没有减速请求的情况(否的情况)下,控制部26判定车速是否比设定值(将该设
定值称为“设定车速值a”)快(s20)。设定车速值a是在既没有加速的请求也没有减速的请求的状态下决定进行哪种速度控制的值。设定车速值a例如可设定为决定是否进行缓慢驾驶的速度,可考虑设为5km/h或者10km/h左右。
81.在车速比设定车速值a慢的情况(否的情况)下,转到步骤s12、s14。不过,由于没有踩踏加速踏板22,因此步骤s14中的加速度为小的值。作为一个例子,可举出以抵抗路面摩擦、驱动系统的机械摩擦等的方式提供维持速度的程度的加速度的方案。
82.在车速比设定车速值a快的情况(是的情况)下,控制部26进行转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110的向第一位置的设定(s22),在此基础上进行将带缓速器的旋转电机28用作发电机的设定(s24)。即,将从车辆10的驱动轴30传递来的旋转能量通过带缓速器的旋转电机28转换为电能,对电池32进行再生充电。不过,这是没有减速请求的状态下的再生,减速度被设定得小。
83.在步骤s18中有减速请求的情况(是的情况)下,控制部26进行转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110的向第一位置的设定以将其用作发电机(s26),在此基础上进行将带缓速器的旋转电机28用作发电机的设定(s28)。不过,在步骤s28中,与步骤s24不同,是减速请求下的再生,提高再生充电的程度,增大减速度。
84.在步骤s16中,在soc比设定soc值高的情况(是的情况)下,控制部26判定是否有减速请求(s30)。在没有减速请求的情况(否的情况)下,控制部26判定车速是否比设定值高(s32)。此处的设定值使用与步骤s20相同的设定车速值a,由此能与soc的程度无关地使车辆10的行为相似。不过,考虑到发电机与缓速器的差异,也可以使用与步骤s20中的设定车速值a不同的值。
85.在步骤s32中,在车速为设定车速值a以下的情况(否的情况)下,控制部26将马达用的转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110设定在第一位置(s34),在此基础上向带缓速器的旋转电机28供给少量的电力,使其作为马达进行工作(s36)。
86.另一方面,在步骤s32中,在车速比设定车速值a快的情况(是的情况)下,带缓速器的旋转电机28被用作缓速器。即,控制部26控制移动机构140,将转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110配置在缓速器用的第二位置(s38)。在转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110一开始就被设定在第二位置的情况下,控制部26维持第二位置。然后,控制部26通过来自电池32的供电而使电流流向线圈96,使车辆10减速(s40)。不过,在步骤s40中,是没有进行减速请求的状况下的车辆10的减速,与步骤s24同样地,减速度被设定得小。
87.在步骤s30中,在有减速请求的情况(是的情况)下,控制部26也将带缓速器的旋转电机28用作缓速器。即,控制部26将转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110设定在第二位置(s42),使大的电流流向线圈96,使车辆10大幅减速(s44)。
88.每当有新的事件发生时,反复实施从步骤s10起的处理。作为新的事件,可举出加速踏板22的操作、制动踏板24的操作、换挡杆20的操作等。作为一个例子,考虑加速踏板22从没有被踩踏(断开)的状态转到被踩踏的(接通)状态。
89.在加速踏板22被踩踏之前的阶段,在soc为设定soc值以下的情况下,根据步骤s16的判定,进入步骤s14、s24、s28中的任一步骤,带缓速器的旋转电机28处于作为马达和发电机进行工作的状态。在该状态下加速踏板22被踩踏了的情况下,在步骤s10的判定之后,省
略步骤s12的过程,进入步骤s14。就是说,无需从缓速器用的第二位置切换至马达用的第一位置,带缓速器的旋转电机28能直接作为马达进行工作,将车辆10加速。此外,在减速请求已发出的情况下,直接进行作为发电机的减速,因此能防止空转并且谋求电效率的提高。
90.另一方面,在加速踏板22被踩踏之前的阶段,在soc比设定soc值高,减速请求已发出且车速为设定车速值a以下的情况下,带缓速器的旋转电机28处于步骤s36的马达驱动状态。在该状态下加速踏板22被踩踏了的情况下,在步骤s10的判定之后,省略步骤s12的过程,进入步骤s14。因此,例如能从使车辆10缓慢行驶的状态高响应性地进行加速。
91.在加速踏板被踩踏之前的阶段,在soc比设定soc值高,没有发出减速请求且车速比设定车速值a快的情况下,带缓速器的旋转电机28处于步骤s40的状态。就是说,带缓速器的旋转电机28正在作为缓速器进行工作。当在该情况下踩踏加速踏板22时,在步骤s10的判定之后,在步骤s12中,将转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110从缓速器用的第二位置切换至马达用的第一位置,然后在步骤s14中进行加速。即,加速之前会产生些许时滞。但是,车辆10在以比设定车速值a快的速度行驶并正在进行切换工作的期间也能持续行驶,因此在进行驾驶方面的影响小。
92.同样地,考虑在加速踏板被踩踏之前的阶段,soc比设定soc值高,没有进行减速请求且车速比设定车速值a快的情况。在该情况下,如上所述,带缓速器的旋转电机28正在作为缓速器进行工作(s38、s40)。在该状态下,当制动踏板24被踩踏时,根据步骤s10、s16、s30、s42、s44的流程,进行由缓速器实现的减速。在该过程中,带缓速器的旋转电机28已经处于缓速器状态,因此能防止或抑制空转,直接进行减速。即,即使在soc比设定值高,无法进行由再生充电实现的减速的状况下,缓速器也会迅速进行工作。
93.在加速踏板22被踩踏之前的阶段,在soc比设定soc值高且减速请求已发出的情况下,处于步骤s44的状态,带缓速器的旋转电机28作为缓速器进行工作,进行大幅减速。在该状态下加速踏板22被踩踏的情况下,在步骤s10的判定之后,在步骤s12中,在将转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110从缓速器用的第二位置切换至马达用的第一位置后在步骤s14中进行加速。但是,在使用缓速器进行大幅减速的情况下,认为原本就处于需要减速的状态,因此即使在进行加速之前有些许时滞,也可以说在进行驾驶方面的影响小。
94.与图6所示的流程不同,也可以是,在s10中加速踏板22为断开的情况下,不进行步骤s16的针对soc的判定,转到步骤s30的处理。在该情况下,在没有减速请求(s30)且车速为设定值以下时(s32),控制部26将马达用的转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110设定在第一位置(s34),在此基础上向带缓速器的旋转电机28供给少量的电力,使其作为马达进行工作(s36)。因此,在从该低速状态进行加速的情况下,在步骤s10、s12、s14的流程中,带缓速器的旋转电机28已经被进行了作为马达的设定,因此能直接进行加速。
95.接着,参照图7,对另一控制例进行说明。在图7的例子中,控制部26首先判定车速是否比设定值(也将该设定值称为“设定车速值b”)快(s50)。如下文所述,设定车速值b是在电池32为满充电等状态下决定转至缓速器的速度,设定为与车辆10通常行驶的速度相同或比之稍快的速度。
96.在步骤s50中,在车速为设定车速值b以下的情况(否的情况)下,控制部26将转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110设定在第一位置(s52)以将其用作马达,
使其作为马达进行工作(s54)。另一方面,在比设定车速值b快的情况(是的情况)下,控制部26判定是否有减速请求(s56)。
97.在没有减速请求的情况(否的情况)下,控制部26判定soc是否比设定值(也将该设定值称为设定soc值)高(s58)。在soc为设定值以下的情况(否的情况)下,能对电池32进行再生充电。因此,控制部26在将转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110设定在第一位置以将其用作发电机的基础上(s60),执行对电池32的再生充电(s62)。不过,在步骤s62中,没有进行减速请求,再生的程度被设定得小。
98.在步骤s58中,在soc比设定soc值高的情况(是的情况)下,能对电池32进行再生充电。因此,控制部26将转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110设定在第二位置,使带缓速器的旋转电机28作为缓速器进行工作(s64)。而且,控制部26使微弱的电流流向线圈96,使带缓速器的旋转电机28进行小幅减速(s66)。
99.在步骤s56中有减速请求的情况(是的情况)下,控制部26判断soc是否比设定soc值高(s68)。典型的是,设定soc值设为与步骤s58中的设定soc值相同,但也可以不同。
100.在soc为设定soc值以下的情况(否的情况)下,控制部26将转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110设定在第一位置以将其用作发电机(s70),执行再生充电(s72)。该再生充电在有减速请求的状况下实施,因此进行大幅减速。
101.在soc比设定soc值高的情况(是的情况)下,控制部26将转子
‑
定子间极靴部70和定子
‑
缓速器转子间极靴部110设定在第二位置以将其用作缓速器(s74),使大电流流向线圈96,进行由缓速器实现的大幅减速(s76)。每当有加速踏板22的操作、制动踏板24的操作、换挡杆20的操作等事件发生时,反复执行从步骤s50起的处理。
102.在图7所示的控制中,在车辆10的车速比设定车速值b快的情况下,在soc为设定soc值以下时,将带缓速器的旋转电机28用作马达和发电机。而且,在进行了减速请求时,直接进行由发电机实现的再生,使车辆10减速。此外,还能通过再生充电来谋求电效率的提高。
103.另一方面,在车辆10的车速比设定车速值b快的情况下,在soc比设定soc值高时,必须使带缓速器的旋转电机28作为缓速器进行工作。由此,能防止以比设定车速值b高的速度行驶,并且在有减速请求的情况下,能直接使缓速器工作。因此,能防止因无法进行再生充电而导致的减速度的降低。
104.(5)其他构成例
105.参照图8~图11,对与图3所示的带缓速器的旋转电机28不同的构成例进行说明。图8~图11均为与图3对应的图,对相同或类似的构成附上相同的附图标记,省略或简化说明。
106.图8所示的带缓速器的旋转电机228具备带有旋转轴242的轴240。轴240的内部既可以是实心的,也可以是空心的。假定轴240朝z坐标的正方向延伸。在轴240上固定有转子50。在转子50的外侧隔着空隙60设有转子
‑
定子间极靴部70的极靴74。
107.在转子
‑
定子间极靴部70的外侧隔着空隙80设有定子90。在定子90的外侧隔着空隙100设有定子
‑
缓速器转子间极靴部110的极靴114。转子
‑
定子间极靴部70与定子
‑
缓速器转子间极靴部110在未图示的部位处被连接,能一体地绕旋转轴转动。在定子
‑
缓速器转子间极靴部110的外侧设有缓速器转子130。
108.这些构造基本上与图3所示的带缓速器的旋转电机28相同,也与图2所示的构造一致。即,带缓速器的旋转电机228具备与旋转轴242同轴地从内侧向外侧设有轴240、转子50、转子
‑
定子间极靴部70、定子90、定子
‑
缓速器转子间极靴部110以及缓速器转子130的构造。
109.缓速器转子130经由臂234固定于轴240的构造也与图3所示的带缓速器的旋转电机28相同。不过,臂234设于z坐标方向的负向侧,壳体250在图8中露出至外部的部位设于z坐标方向的正方向。
110.在带缓速器的旋转电机228中,壳体250经由油封264对缓速器转子130的端附近进行支承。此外,在壳体250上设有在带缓速器的旋转电机228的内侧朝向定子90侧后朝向轴240的臂252。该臂252支承定子90,并且经由轴承262将轴240的外周面支承为可旋转。此外,在壳体250的另一端侧,经由轴承260将轴240的外周面支承为可旋转。
111.如此,在图8所示的带缓速器的旋转电机228中,轴240和壳体150的形状及支承方式与图3所示的带缓速器的旋转电机28大不相同。但是,转子50、转子
‑
定子间极靴部70、定子90、定子
‑
缓速器转子间极靴部110以及缓速器转子130的关系基本没变。因此,带缓速器的旋转电机228能作为马达和发电机以及缓速器进行工作。
112.在图9所示的带缓速器的旋转电机328中,具备带有旋转轴342的内部实心或中空的轴340。假定轴340朝z坐标的正方向延伸。带缓速器的旋转电机328具备在轴340的外侧按照从内侧向外侧的顺序设有转子50、转子
‑
定子间极靴部70、定子90、定子
‑
缓速器转子间极靴部110以及缓速器转子130的构造。该构造与图3所示的带缓速器的旋转电机28相同。此外,缓速器转子130通过臂336被固定于轴340的构造也与图3所示的带缓速器的旋转电机28相同。
113.在图9所示的带缓速器的旋转电机328中,其整体由壳体350覆盖。壳体350具备:覆盖轴340的端部侧(z坐标方向的负向侧)的部位352、覆盖缓速器转子130的外侧的部位356以及覆盖缓速器转子130的比臂336靠z坐标方向的正向侧的部位358。壳体350在部位352的内侧通过轴承362将轴340的端部外周附近支撑为可旋转。此外,壳体350在部位358的顶端通过轴承360将轴340中的比臂336靠z坐标正向的外周支撑为可旋转。进而,壳体350通过从部位352向定子90侧延伸的部位354来固定定子90。
114.在图9所示的带缓速器的旋转电机328中,轴340和壳体350的形状及支承方式与图3所示的带缓速器的旋转电机28大不相同。但是,转子50、转子
‑
定子间极靴部70、定子90、定子
‑
缓速器转子间极靴部110以及缓速器转子130的关系基本没变。因此,带缓速器的旋转电机328能作为马达和发电机以及缓速器进行工作。
115.以上所示的带缓速器的旋转电机28、228、328均具备被称为径向间隙型的构造。即,在转子的外侧隔着间隙(空隙)同轴地设有定子。此外,缓速器转子也在定子的外侧同轴地被配置为径向间隙型。相对于此,以下所示的带缓速器的旋转电机具备被称为轴向间隙型的构造。即,转子与定子在旋转轴方向上隔着间隙排列。
116.在图10所示的带缓速器的旋转电机428中,轴440沿着旋转轴442设置。在轴440上设有在r坐标轴的方向上延伸的支承部444。在支承部444上固定有转子450。转子450形成为圆筒形,与旋转轴442同轴地设置。在转子450的z坐标方向的负方向侧,隔着空隙460与旋转轴442同轴地设有圆筒形的转子
‑
定子间极靴部470。转子
‑
定子间极靴部470具备沿周向周期性地配置的极靴474。在转子
‑
定子间极靴部470的z坐标方向的负方向侧,隔着空隙480设
有定子490。定子490形成为与旋转轴442同轴地配置的圆筒形,省略了图示的齿沿周向周期性地配置。齿从定子490中的z坐标方向的一端延伸至另一端,磁通能从该一端流至另一端。
117.在定子490的z坐标方向的负方向侧,隔着空隙500与旋转轴442同轴地设有圆筒形的定子
‑
缓速器转子间极靴部510。定子
‑
缓速器转子间极靴部510具备沿周向周期性地设置的极靴514。定子
‑
缓速器转子间极靴部510在未图示的位置与转子
‑
定子间极靴部470连接。
118.在定子
‑
缓速器转子间极靴部510的z坐标方向的负方向,隔着空隙620设有圆筒形的缓速器转子530。在缓速器转子530于z坐标方向的负方向侧设有翅片532。缓速器转子530固定于轴440的外表面。
119.壳体550具备设于r坐标方向的正方向侧的部位552和设于z坐标方向的正方向侧的部位554。部位552支承定子490。此外,在部位552的z坐标方向的负方向,通过轴承562将缓速器转子530的r坐标方向的正方向的端部支承为可旋转。部位554经由轴承560将轴440的外周面支承为可旋转。
120.虽然图10中省略了图示,但导入有参照图2说明过的移动机构140。而且,通过使转子
‑
定子间极靴部470和定子
‑
缓速器转子间极靴部510移动至第一位置来使带缓速器的旋转电机428作为马达和发电机进行工作,通过使转子
‑
定子间极靴部470和定子
‑
缓速器转子间极靴部510移动至第二位置来使带缓速器的旋转电机428作为缓速器进行工作。
121.在图11所示的带缓速器的旋转电机628中,在旋转轴642上设置有支柱640。在支柱640上固定有定子690。此外,在支柱640上经由轴承760和轴承762以可绕支柱的周围旋转的方式支承有包含缓速器转子730和翅片732的旋转框架734。
122.设于带缓速器的旋转电机628的转子650、转子
‑
定子间极靴部670、定子690、定子
‑
缓速器转子间极靴部710以及缓速器转子730的形状和位置关系基本与图10所示的带缓速器的旋转电机428相同。但是,在图11所示的带缓速器的旋转电机628中,转子650装配于旋转框架734,与缓速器转子730一体地旋转。定子690固定于支柱640。此外,转子
‑
定子间极靴部670和定子
‑
缓速器转子间极靴部710装配于支柱640,设定为能通过未图示的移动机构移动至第一位置和第二位置。
123.在带缓速器的旋转电机628中,旋转框架734以能传递转矩的方式与车辆10的驱动轴30连接。带缓速器的旋转电机628与图10所示的带缓速器的旋转电机428同样能作为马达和发电机进行工作以及作为缓速器进行工作。
124.如上所述,轴向间隙型带缓速器的旋转电机428、628也与径向间隙型同样能作为马达和发电机进行工作以及作为缓速器进行工作。需要说明的是,以上的说明是对本实施方式进行示例的内容,也可以采用其他各种实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1