消除PWM过调制区低次谐波对闭环控制影响的新方法
消除pwm过调制区低次谐波对闭环控制影响的新方法
技术领域
1.本发明涉及pwm过调制技术,矢量控制,具体涉及一种消除pwm过调制区低次谐波对闭环控制影响的新方法。
背景技术:
2.pwm(pulse width modulation,pwm)过调制(overmodulation)技术对于提升最大输出基波电压幅值,扩大电机恒转矩调速范围具有显著意义。目前svpwm(space vector pulse width modulation,svpwm)过调制算法的研究较普遍
[1
‑
21]
,但其算法构成复杂,应用较难。采用分裂式可变调制波的pwm过调制技术
[22
‑
23]
的突出优点是pwm过调制算法简单,且与现有spwm(sinusoidal pulse width modulation,spwm)技术形成无缝衔接的拓展关系,构成覆盖m∈[0,4/π]全电压范围的cbpwm(carrier
‑
base pwm,cbpwm)算法,并且具有全电压范围的thd(total harmonic distortion,thd)值低,谐波影响小的优点。然而,与线性区的pwm不同,过调制区pwm波出现5、7、11、13等低次谐波,且数值较大,致使输出电压严重畸变,导致电机产生转矩脉动。虽然处于高速运行条件下的转矩脉动引起转速脉动幅值较小,但是在闭环调速矢量控制系统中,电机电流所含低次谐波分量的返馈量将影响闭环pi(proportion integration,pi)控制,使其不能正常行使运算功能,甚至导致输出电压振荡。这一问题妨碍了pwm过调制技术在闭环控制中的应用。目前采用多电平逆变器供电的办法
[1][2]
,抑制低次谐波,或采用移相30
°
双三相绕组电机及六相电压源逆变器供电的办法消除5、7次谐波
[3]
,但不能消除11、13次谐波。所有这些方法需使用数量增倍的功率半导体开关器件,并且pwm算法及控制较为复杂。
[0003]
图1为采用三电平逆变器供电的三相绕组交流电机系统,相较于通用的二电平逆变器,其输出电压的电平数明显增多,因此在同等开关频率条件下,可使输出电压波形质量有较大改善,谐波含量明显减少,有利于抑制pwm过调制区的低次谐波影响。然而,所使用的功率半导体开关器件数要比二电平逆变器增加一倍。并且在负载情况下,逆变器中点o有电流流过,容易造成中点o电位的变化,偏离在对称情况下的零电位,从而影响输出波形的正弦度,由此又附加产生了其它谐波。这是三电平逆变器的固有问题。
[0004]
图2为采用移相30
°
双三相绕组电机及六相电压源逆变器供电的办法消除6n
±
1(n=1,3,5,
…
)各次谐波。电机具有两套三相绕组,分别为a、b、c与d、e、f三相绕组,它们在空间上相距30
°
电角度,并且分别施加于两套绕组的三相电源在时间上也相差30
°
电角度,使得各绕组磁场所含6n
±
1(n=1,3,5,
…
)各次谐波完全抵消。但仍有12n
±
1(n=1,3,5,
…
)各次谐波存在,无任何削弱。其中11、13次电压谐波较大,施加于绕组所产生的电流含有同次谐波,其返馈量将影响闭环pi(proportion integration,pi)控制,仍将导致输出电压振荡。由于逆变电源为六相,所需开关器件数较三相逆变电源增加一倍,由此又带来成本提升,并增加了控制复杂性。
[0005]
综上所述,现有消除或抑制pwm过调制区低次谐波影响的方法各有特点也各有不足,均未能完全消除pwm过调制区控制时所产生的低次谐波电流返馈量对闭环控制的影响。
并且所述方法的共同缺点是需使用数量倍增的功率半导体开关器件,由此带来成本提升。并且由于开关器件数多,而使pwm算法及相关控制变得复杂。
[0006]
参考文献:
[0007]
[1]arun rahul s,sumit pramanick,r.sudharshan kaarthik,et al.extending the linear modulation range to the full base speed using a single dc
‑
link multilevel inverter with capacitor
‑
fed h
‑
bridges for im drives[j].ieee transactions on power electronics,2017,32(7):5450.
[0008]
[2]刘贺,姜建国,乔树通.一种应用于多电平svpwm的过调制算法[j].电机与控制学报,2016,20(1):7.
[0009]
liu he,jiang jianguo,qiao shutong.an over
‑
modulation scheme of svpwm used in multi
‑
level inverters[j].electric machines and control,2016,20(1):7.
[0010]
[3]周长攀,苏健勇,杨贵杰.双三相永磁同步电机全调制比范围空间矢量脉宽调制[j].电工技术学报,2015,30(10):90.
[0011]
zhou changpan,su jianyong,yang guijie.the svpwm strategy in full modulation region for dual three
‑
phase pmsm[j].transactions ofchina electrotechnical society,2015,30(10):90.
[0012]
[4]李泽,郭源博,张铭,等.考虑输出电压平衡的三相四开关逆变器svpwm过调制策略[j].电机与控制学报,2019,23(7):53.
[0013]
li ze,guo yuanbo,zhang ming,et al.overmodulation svpwm algorithm ofthree
‑
phase four
‑
switch inverter for balanced output voltages[j].electric machines and control,2019,23(7):53.
[0014]
[5]saroj kumar sahoo,tanmoy bhattacharya.field weakening strategy for a vector
‑
controlled induction motor drive near the six
‑
step mode of operation[j].ieee transactions on power electronics,2016,31(4):3043.
[0015]
[6]merlin chai,dan xiao,rukmi dutta,et al.space vector pwm techniques for three
‑
to
‑
five
‑
phase indirect matrix converter in the overmodulation region[j].ieee transactions on industrial electronics,2016,63(1):550.
[0016]
[7]袁渊,朱孝勇,左月飞,等.共直流母线开绕组电机的移相解耦控制策略[j].电工技术学报,2019,34(22):4670.
[0017]
yuan yuan,zhu xiaoyong,zuo yuefei,et al.decoupled svpwm control strategy for open winding permanent magnet synchronous motor with common dc bus[j].transactions of china electrotechnical society,2019,34(22):4670.
[0018]
[8]刘云峰,何英杰,王超,等.级联h桥多电平逆变器空间矢量调制与三角载波调制统一理论[j].电工技术学报,2016,31(16):114.
[0019]
liu yunfeng,he yingjie,wang chao,et al.theunity theory between space vector and triangular carrier pwm modulation strategy in cascaded h bridge multilevel inverter[j].transactions of china electrotechnical society,2016,31(16):114.
[0020]
[9]黄守道,赵礼,郑剑,等.基于加权路径内点法的六相电机svpwm四矢量调制方
into overmodulation region[j].ieee transactions on power electronics,2003,18(2):604.
[0034]
[20]马志文,郑琼林,林飞.具有全调制范围的空间矢量脉宽调制算法研究[j].北京交通大学学报,2007,31(2):89.
[0035]
ma zhiwen,zheng qionglin,lin fei.study of space vector pwm algorithm with entire modulation range[j].journal ofbeijing jiaotong university,2007,31(2):89.
[0036]
[21]novel b s.digital continuous control of svm inverters in the overmodulation range[j].ieee transactions on industryapplications,1997,33(2):525.
[0037]
[22]王榕生.分裂式可变调制波的pwm过调制技术及谐波分析[j].电工技术学报,2017,32(10):208.
[0038]
wang rongsheng.a novel pwm overmodulation technique based on the splitting variable modulating waveform and harmonic influence analysis[j].transactions of china electrotechnical society,2017,32(10):208.
[0039]
[23]王榕生.分裂式可变调制波pwm过调制方法:zl201510161273.9[p].2017.。
技术实现要素:
[0040]
本发明的目的在于提供一种消除pwm过调制区低次谐波对闭环控制影响的新方法,该方法采用数字低通滤波技术消除所有低次谐波对控制的影响,通过滤波控制软件克服滤波技术带来的动态响应速度减缓的问题,以此解决滤波与动态响应之间的矛盾,有效克服pwm过调制区低次谐波对闭环调速矢量控制的影响,使现有pwm控制由线性区扩展至过调制区,提升pwm最大输出基波电压10%,电机恒转矩调速范围也因此扩大相应数值。
[0041]
为实现上述目的,本发明的技术方案是:一种消除pwm过调制区低次谐波对闭环控制影响的新方法,采用数字低通滤波离散算法消除所有低次谐波对控制的影响,并通过滤波控制软件克服数字低通滤波离散算法带来的动态响应速度减缓的问题;所述滤波控制软件基本逻辑功能为当负载变化或转速指令值改变时,关闭滤波环节,让控制系统瞬间作出响应,使矢量控制的返馈交轴电流i
t
或电磁转矩t
em
产生跃变;当瞬态过程结束,再开启滤波环节。
[0042]
在本发明一实施例中,所述采用数字低通滤波离散算法消除所有低次谐波对控制的影响的实现方式如下:
[0043]
为消除返馈电流所含低次谐波分量对返馈控制的影响,在三个pi计算通道上设置滤波环节,具体的:对返馈直轴电流i
m
即关于δi
m
的pi运算输入量施以低通滤波,对交轴电压v
t
即关于δi
t
的pi运算输出量施以低通滤波,以及对返馈交轴电流i
t
即关于δi
t
的pi运算输入量施以低通滤波;所述滤波环节采用的数字低通滤波离散算法为:
[0044]
y
out
(k)=k1y
out
(k
‑
1)+k2y
in
(k)
ꢀꢀ
(1)
[0045]
式中,y
out
(k)为第k个采样周期滤波输出量,y
out
(k
‑
1)为第k
‑
1个采样周期滤波输出量,y
in
(k)为第k个采样周期滤波输入量,τ为滤波时间常数,t
c
为pwm载波周期,亦即采样周期;在系统每个循环采样周期t
c
中按式(1)实时计算i
m
、v
t
、i
t
各量的滤波输出值,该计算为循环过程,由此实现对式(1)输入量y
in
(i
m
、v
t
、i
t
)中的各次谐波进行滤除,使输出量y
out
仅为基波变换值,不含谐波,由此消除谐波对后续pi控制的影响;每次循环运算结束前应保存当前运算的y
out
(k)值作为下次循环运算的y
out
(k
‑
1)值。
[0046]
在本发明一实施例中,所述数字低通滤波离散算法中,对k1、k2的取值须满足k1>0,k2>0及k1+k2=1的关系,k2取值越小,滤滤效果越好。
[0047]
在本发明一实施例中,所述滤波控制软件具体实现功能如下:
[0048]
针对电机负载变化或转速指令值改变两种情形触发的瞬态过程,控制关闭v
t
、i
t
滤波,直至瞬态过程结束;当测出参考转速n
ref
,即转速指令值大于额定转速时开启v
t
、i
t
滤波,否则关闭滤波;为保持电机磁链恒定,始终对i
m
滤波;由于电机负载变化必引起参考转速变化,当测出参考转速变化量delta_n超过给定值时,即关闭v
t
、i
t
滤波,使控制系统能瞬间作出响应,即返馈交轴电流i
t
或电磁转矩t
em
瞬间产生跃变,促使系统快速达到新的状态;关闭v
t
、i
t
滤波的时间长短取决于变量delta_t的赋值,该赋值即为系统瞬态响应时间,其大小取决于系统电时间常数,当时间计数器t达到delta_t值时,瞬态过程结束,开启v
t
、i
t
滤波并复位t;当测出参考转速n
ref
发生变化且n
ref
新值大于额定转速n
n
时,即关闭v
t
、i
t
滤波,当时间计数器t值达到delta_t值时,瞬态过程结束,开启v
t
、i
t
滤波并复位t。
[0049]
在本发明一实施例中,所述滤波控制软件还具有如下功能:
[0050]
设置转速检测允许标志sp_flang与负载检测允许标志load_flang两个变量;当处理负载变化引起的瞬态过程时,复位sp_flang变量,禁止对参考转速n
ref
变化的检测,直至瞬态过程结束;当处理参考转速n
ref
变化引起的瞬态过程时,复位load_flang变量,禁止对负载变化的检测,直至瞬态过程结束。以此规避同时面对负载及参考转速n
ref
变化引起的瞬态过程。
[0051]
相较于现有技术,本发明具有以下有益效果:本发明提出了消除pwm过调制区低次谐波对闭环控制影响的新方法,该方法采用数字低通滤波技术消除所有低次谐波对闭环控制的影响,通过滤波控制软件克服滤波技术带来的动态响应速度减缓的问题;该方法具有如下优点:
[0052]
1、适用于通用二电平逆变器供电的闭环调速矢量控制系统,无需增加功率半导体开关器件数量,不增加硬件成本;
[0053]
2、算法简单,只要将滤波控制软件嵌入现有矢量控制系统即可实现滤波功能,消除pwm过调制区低次谐波影响,基本不增加系统软件开销;
[0054]
3、克服了滤波对系统动态响应的影响后,使pwm过调制区的闭环调速矢量控制的动态性能达到线性调制区同样水平。
附图说明
[0055]
图1为三电平逆变器供电的三相绕组交流电机系统。
[0056]
图2为具有六相电压源逆变器供电的移相30
°
双三相绕组交流电机系统。
[0057]
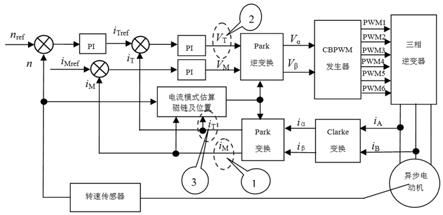
图3为矢量控制系统结构图。
[0058]
图4为本发明滤波程序框图。
具体实施方式
[0059]
下面结合附图,对本发明的技术方案进行具体说明。
[0060]
本发明一种消除pwm过调制区低次谐波对闭环控制影响的新方法,采用数字低通滤波离散算法消除所有低次谐波对控制的影响,并通过滤波控制软件克服数字低通滤波离散算法带来的动态响应速度减缓的问题;所述滤波控制软件基本逻辑功能为当负载变化或转速指令值改变时,关闭滤波环节,让控制系统瞬间作出响应,使矢量控制的返馈交轴电流i
t
或电磁转矩t
em
产生跃变;当瞬态过程结束,再开启滤波环节。
[0061]
以下为本发明具体实现过程。
[0062]
本发明提出一种消除pwm过调制区低次谐波影响的新方法。该方法的基本思想是,
①
构建返馈电流数字低通滤波算法。该算法对闭环调速矢量控制的pi输入量(即返馈量)及输出量所含的各次谐波实时滤波。
②
针对滤波引起动态响应速度减缓的问题,设计专门控制软件予以克服。其基本逻辑功能为当负载变化或转速指令值改变时,关闭滤波环节(不进行滤波),让控制系统瞬间作出响应,使交轴电流i
t
或电磁转矩t
em
产生跃变;当瞬态过程结束,再开启滤波环节。以此解决滤波与动态响应之间的矛盾,有效克服pwm过调制区低次谐波对闭环调速矢量控制的影响,使现有pwm控制由线性区扩展至过调制区,提升pwm最大输出基波电压10%,电机恒转矩调速范围也因此扩大相应数值。
[0063]
具体的本发明消除pwm过调制区低次谐波对闭环控制影响的新方法由以下两部分构成:
[0064]
一、构建数字低通滤波离散算法(即返馈电流数字低通滤波算法)
[0065]
图3为矢量控制系统结构图。为消除返馈电流i
a
、i
b
所含低次谐波分量对返馈控制的影响,如图3所示选择在三个pi计算通道上设置滤波环节。
[0066]
图3中,标识1表示对返馈直轴电流i
m
即关于δi
m
的pi运算输入量施以低通滤波,标识2表示对交轴电压v
t
即关于δi
t
的pi运算输出量施以低通滤波,对v
t
滤波是为了更有效消除pwm输出电压振荡。标识3表示对返馈交轴电流i
t
即关于δi
t
的pi运算输入量施以低通滤波。
[0067]
上述滤波采用数字低通离散算法为:
[0068]
y
out
(k)=k1y
out
(k
‑
1)+k2y
in
(k)
ꢀꢀ
(1)
[0069]
式中,y
out
(k)为第k个采样周期滤波输出量,y
out
(k
‑
1)为第k
‑
1个采样周期滤波输出量,y
in
(k)为第k个采样周期滤波输入量,τ为滤波时间常数,t
c
为pwm载波周期,亦即采样周期。使用时对k1、k2的取值须满足k1>0,k2>0及k1+k2=1的关系。k2取值越小,滤滤效果越好。
[0070]
图3通常采用数字控制,在系统每个循环采样周期t
c
中按式(1)实时计算i
m
、v
t
、i
t
各量的滤波输出值,该计算为循环过程,由此实现对式(1)输入量y
in
(i
m
、v
t
、i
t
)中的各次谐波进行滤除,使输出量y
out
仅为基波变换值,不含谐波,由此消除谐波对后续pi控制的影响。每次循环运算结束前应保存当前运算的y
out
(k)值作为下次循环运算的y
out
(k
‑
1)值。
[0071]
二、滤波控制程序
[0072]
滤波又伴生瞬态响应减缓问题,特别是对式(1)中的k2取值很小时,瞬态响应减缓就更为突出,影响系统动态性能。为此,应考滤在负载变化或转速指令值改变触发瞬态过程
期间,关闭v
t
、i
t
各量滤波环节(始终保持对i
m
滤波,使电机磁链恒定),使控制系统能瞬间作出响应,即交轴电流i
t
或电磁转矩t
em
瞬间产生跃变,促使系统快速达到新的状态。当瞬态过程结束,再开启滤波环节。以此解决滤波与动态响应之间的矛盾。又由于滤波作用只发生在pwm过调制区,该区所对应的电机转速在额定值以上,因此,可根据转速所处范围控制是否对i
m
、i
t
、v
t
滤波。而对处于pwm线性区的i
m
、i
t
、v
t
不予滤波。基于上述思想,编制滤波控制软件程序框图如图4所示。
[0073]
图4程序针对电机负载或参考转速(转速指令)变化两种情形触发的瞬态过程,控制关闭v
t
、i
t
滤波,直至瞬态过程结束。当程序测出参考转速n
ref
大于额定转速时开启v
t
、i
t
滤波,否则关闭滤波。为保持电机磁链恒定,始终保持对i
m
滤波。由于负载变化必引起转速变化,当程序测出转速变化量delta_n超过给定值时,即关闭v
t
、i
t
滤波,使控制系统能瞬间作出响应,即交轴电流i
t
或电磁转矩t
em
瞬间产生跃变,促使系统快速达到新的状态。关闭v
t
、i
t
滤波的时间长短取决于变量delta_t的赋值(该赋值即为系统瞬态响应时间,其大小取决于系统电时间常数,通常为毫秒级),当时间计数器t达到delta_t值时,瞬态过程结束,开启v
t
、i
t
滤波并复位t。当程序测出参考转速n
ref
发生变化且n
ref
新值大于额定转速n
n
时,即关闭v
t
、i
t
滤波,当时间计数器t值达到delta_t值时,瞬态过程结束,开启v
t
、i
t
滤波并复位t。程序还设置了转速检测允许标志sp_flang与负载检测允许标志load_flang两个变量。当程序处理负载变化引起的瞬态过程时,复位sp_flang变量,禁止对参考转速n
ref
变化的检测,直至瞬态过程结束;当程序处理参考转速n
ref
变化引起的瞬态过程时,复位load_flang变量,禁止对负载变化的检测,直至瞬态过程结束。以此规避同时面对负载及参考转速n
ref
变化引起的瞬态过程。
[0074]
以图3所示矢量控制dsp软件(c语言)为基础,将图4滤波控制程序嵌于各pi通道相应位置,即可实现覆盖m∈[0,4/π]全电压范围的矢量控制pwm调速。该方法适用于各种pwm过调制技术,如svpwm过调制技术
[1
‑
21]
或分裂式可变调制波的pwm过调制技术
[22
‑
23]
等。
[0075]
以上是本发明的较佳实施例,凡依本发明技术方案所作的改变,所产生的功能作用未超出本发明技术方案的范围时,均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1