轴向两极均分磁铁隐藏式汽车雨刮电机组件及其控制方法与流程
轴向两极均分磁铁隐藏式汽车雨刮电机组件及其控制方法
1.技术领域
2.本发明涉及一种汽车雨刮电机组件及其控制方法。
3.
背景技术:
4.当前主流的车用前雨刮控制电机组件运行和复位的结构方式为普通的三个触片组合回位板结构、二个触片组合回位板结构以及通过磁信号控制速度和定位的高端结构。高端结构中,目前市场上的主流结构为分体式磁信号控制电机组件,如图1和图2所示,电机组件由电机1、组件壳体2组成,电机1的壳体与组件壳体2固定,组件壳体2内安装有各传动件、霍尔传感器he、pcb板6等,电机1的转动轴与蜗杆4固定,蜗杆4上还固定有径向多极塑磁3,靠近该多极塑磁3的组件壳体2内固定有两只霍尔传感器he1和传感器he2,霍尔传感器he1和传感器he2能采集径向多极塑磁3的位置信号,从而能得到蜗杆4的转动速度;减速齿轮4经中心轴51可转动地与组件壳体2固定且与蜗杆4啮合,中心轴51作为本电机组件的输出轴能与雨刮器联接;pcb板6固定在组件壳体2内,用于安装控制元器件且经接插件7输送电信号;中心轴51或减速齿轮4上还固定有n极磁环521和s极磁环522,n极磁环521和s极磁环522需要根据雨刮器的转动角度定制,且通过霍尔传感器he3和传感器he4采集磁性信号,从而获得中心轴51的转动极限位置,霍尔传感器he3和传感器he4固定在pcb板6上。
5.现有技术结构复杂,多极塑磁3加工时,需要专用含有多个线圈绕成环形工装外冲,控制精度越高则需要极对数越多,相应的充磁线圈也越多,越复杂,然而线圈数不能无限制增加;装配时,需要将电机1的转子先绕好线再用工装紧配和定位电枢轴上的滚珠轴承然后再换工装紧配转子轴和多极塑磁3,工艺繁琐复杂,增加生产加工检验等资金投入,相应的需要匹配2个霍尔元件采集信号;多级塑磁3往往根据设计还需要开模,费用不菲;减速齿轮4上的n极磁环521和s极磁环522也需要提前根据设计角度给予磁环特定的不均分角度以控制电机实际输出角度大小,由于特定角度的存在则无法再根据需要随意适时调整,难以通用化。
6.
技术实现要素:
7.本发明根据以上不足,提供了一种轴向两极均分磁铁隐藏式汽车雨刮电机组件。
8.本发明的技术方案是:一种轴向两极均分磁铁隐藏式汽车雨刮电机组件,包括电机组件本体,该电机组件本体设置有:组件壳体;电机,电机的壳体与组件壳体固定;蜗杆,其与电机的转轴固定且位于组件壳体内;
减速齿轮,其经中心轴可转动地与组件壳体固定,减速齿轮与蜗杆啮合,中心轴作为本电机组件的输出轴能间接或直接与雨刮器联接;pcb板,其固定在组件壳体内,用于安装控制元器件且经接插件输送电信号;还包括:磁性棒,其与减速齿轮的中心轴同轴心固定,磁性棒由第一磁性棒和第二磁性棒组成,第一磁性棒和第二磁性棒的磁极按轴向分布,且第一磁性棒和第二磁性棒中不同的n极和s极位于磁性棒的同一个端面上;磁编码传感器芯片ic,其焊接在pcb板上,能采集第一磁性棒和第二磁性棒中n极和s极的位置信号;控制芯片,其焊接在pcb板上且分别与磁编码传感器芯片ic和电机电连接,控制芯片能根据磁编码传感器芯片ic采集的n极和/或s极的位置信号,确定中心轴的转动角度和转动速度信号,从而能控制雨刮器的起始位置a、隐藏位置c和终点位置b。
9.作为优选,所述磁编码传感器芯片ic的型号为stm32f030。
10.作为优选,所述磁性棒为圆柱棒,所述的第一磁性棒或第二磁性棒中n极或s极的面积为半圆形。
11.作为优选,所述的磁性棒轴向削去圆弧块,削去该圆弧块的第一磁性棒和第二磁性棒形状对称。
12.作为优选,所述磁编码传感器芯片ic的中心与所述磁性棒的轴中心延长线相交。
13.作为优选,所述磁性棒为一体制成。
14.一种轴向两极均分磁铁隐藏式汽车雨刮电机组件的控制方法,包括所述的一种轴向两极均分磁铁隐藏式汽车雨刮电机组件,控制方法包括如下步骤:s1.根据雨刮器的摆动角度确定中心轴的转动角度,根据中心轴的转动角度,确定磁性棒相对于磁编码传感器芯片ic的转动角度,从而确定磁性棒上与雨刮器的起始位置a、隐藏位置c和终点位置b分别相对应的a位置、b位置和c位置;s2. 根据a位置、b位置和c位置,分别得出磁编码传感器芯片ic输出的a磁感应位置信号、b磁感应位置信号和c磁感应位置信号;s3. 控制芯片在接收到汽车控制中心开始雨刮的指令后,控制芯片控制电机使得雨刮器朝终点位置b方向转动,当控制芯片检测到磁编码传感器芯片ic输出b磁感应位置信号时,电机控制雨刮器朝起始位置a方向转动,当磁编码传感器芯片ic输出a磁感应位置信号时,电机控制雨刮器朝终点位置b方向转动,当磁编码传感器芯片ic输出b磁感应位置信号时,电机控制雨刮器朝起始位置a方向转动,以此类推;当控制芯片在接收到汽车控制中心停止雨刮的指令后,雨刮器完成当前的最后一个周期的雨刮动作后,电机控制雨刮器朝隐藏位置c方向转动,直至出现c磁感应位置信号时,电机停止转动。
15.步骤s1中,根据磁编码传感器芯片ic相对于磁性棒的零磁场零起始位置确定磁编码传感器芯片ic的初始位置,磁编码传感器芯片ic输出的a磁感应位置信号、b磁感应位置信号和c磁感应位置信号以所述的初始位置为基准获得的相对位置信号。
16.本发明相对于现有技术有如下的优点:本发明大大简化了雨刮定位和速度采集方面相关的结构,降低了成本,无需加工多极塑磁,无需对n极磁环和s极磁环进行特制,通过软件就能根据不同的车型设置雨刮器的起始位置a、隐藏位置c和终点位置b。
17.本发明具有结构简单、成本低、安装使用方便、通过软件编程能适用任何车型的有益效果。
18.附图说明
19.图1为现有汽车雨刮电机组件的整体结构示意图。
20.图2为现有汽车雨刮电机组件的内部结构示意图。
21.图3为本发明的内部主要结构示意图。
22.图4为本发明与磁性棒相关的结构示意图。
23.图5为本发明与磁性棒相关的立体结构示意图。
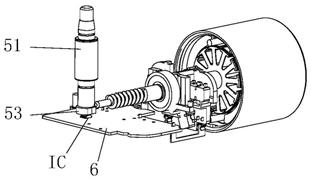
24.图6为本发明磁性棒和磁编码传感器芯片ic位置相关的结构示意图。
25.图7、图8和图9为本发明磁性棒和磁编码传感器芯片ic不同的起始位置设定时的结构示意图。
26.具体实施方式
27.现结合附图对本发明作进一步的说明:如图2
‑
图4所示,一种轴向两极均分磁铁隐藏式汽车雨刮电机组件,包括电机组件本体,该电机组件本体设置有:组件壳体2;电机1,电机1的壳体与组件壳体2固定;蜗杆4,其与电机1的转轴固定且位于组件壳体2内;减速齿轮4,其经中心轴51可转动地与组件壳体2固定,减速齿轮4与蜗杆4啮合,中心轴51作为本电机组件的输出轴能直接与雨刮器联接,或者,输出轴经传动结构与雨刮器联接。
28.pcb板6,其固定在组件壳体2内,用于安装控制元器件且经接插件7输送电信号;磁性棒53,其与减速齿轮4的中心轴51同轴心固定,磁性棒53由第一磁性棒531和第二磁性棒532组成,第一磁性棒531和第二磁性棒532的磁极按轴向分布,且第一磁性棒531和第二磁性棒532中不同的n极和s极位于磁性棒53的同一个端面上;磁编码传感器芯片ic,其焊接在pcb板6上,能采集第一磁性棒531和第二磁性棒532中n极和s极的位置信号,磁编码传感器芯片ic根据所处的不同的n极和s极位置能输出相应的电信号,磁编码传感器芯片ic内部设置有多个霍尔传感器;控制芯片,其焊接在pcb板6上且分别与磁编码传感器芯片ic和电机1电连接,控制芯片能根据磁编码传感器芯片ic采集的n极和s极的位置信号,确定中心轴51的转动角度和转动速度信号,从而能控制雨刮器的起始位置a、隐藏位置c和终点位置b。
29.作为优选,本实施例中磁编码传感器芯片ic的型号为stm32f030。
30.磁性棒53为圆柱棒,第一磁性棒531或第二磁性棒532中n极或s极的面积为半圆形。磁性棒53可以一体制成,通过专用的充磁机得到方向相反的两对磁极,也可以由两根半圆弧形磁棒合体制成。
31.磁性棒53轴向削去圆弧块,削去该圆弧块的第一磁性棒531和第二磁性棒532形状对称。需要说明的是,由于磁性棒53的外形很难分辨n极和s极,削去圆弧块后,n极和s极也就容易判断,方便安装、维修等。
32.作为优选,磁编码传感器芯片ic的中心与磁性棒53的轴中心延长线相交,该结构方便定位。
33.一种轴向两极均分磁铁隐藏式汽车雨刮电机组件的控制方法,包括一种轴向两极均分磁铁隐藏式汽车雨刮电机组件,控制方法包括如下步骤:s1.根据雨刮器的摆动角度确定中心轴51的转动角度,根据中心轴51的转动角度,确定磁性棒53相对于磁编码传感器芯片ic的转动角度,从而确定磁性棒53上与雨刮器的起始位置a、隐藏位置c和终点位置b分别相对应的a位置、b位置和c位置;s2. 根据a位置、b位置和c位置,分别得出磁编码传感器芯片ic输出的a磁感应位置信号、b磁感应位置信号和c磁感应位置信号;s3. 控制芯片通过接插件7在接收到汽车控制中心开始雨刮的指令后,控制芯片控制电机1使得雨刮器朝终点位置b方向转动,当控制芯片检测到磁编码传感器芯片ic输出b磁感应位置信号时,电机1控制雨刮器朝起始位置a方向转动,当磁编码传感器芯片ic输出a磁感应位置信号时,电机1控制雨刮器朝终点位置b方向转动,当磁编码传感器芯片ic输出b磁感应位置信号时,电机1控制雨刮器朝起始位置a方向转动,以此类推;当控制芯片在接收到汽车控制中心停止雨刮的指令后,雨刮器完成当前的最后一个周期的雨刮动作后,电机1控制雨刮器朝隐藏位置c方向转动,直至出现c磁感应位置信号时,电机1停止转动。
34.控制芯片还通过接插件7接收汽车控制中心的指令,向电机输出不同的脉宽调制电压信号,以控制电机的速度,从而控制雨刮快速或慢速摆动。
35.进一步地,步骤s1中,根据磁编码传感器芯片ic相对于磁性棒53的零磁场零起始位置确定磁编码传感器芯片ic的初始位置,磁编码传感器芯片ic输出的a磁感应位置信号、b磁感应位置信号和c磁感应位置信号以初始位置为基准获得的相对位置信号。
36.由于磁性棒53存在者n极和s极的交界线533,该交界线533处的磁场强度为零,本发明在安装过程中,磁编码传感器芯片ic相对于磁性棒53的位置大致有如下几种情况,第一种情况,如图7,磁编码传感器芯片ic的初始位置可以设置在交界线533处,此时,初始位置与雨刮器的起始位置a相对应的a位置重叠,则b位置位于s极的区域,c位置位于n极的区域,在这种情况软件的编程最简单最方便;第二种情况,如图8,a位置、b位置和c位置全部设置在 s极的区域;第三种情况,a位置、b位置和c位置全部设置在 n极的区域;第四种情况,如图9,a位置、b位置和c位置分布在 s极和n极的区域。第二种情况、第三种情况和第四种情况初始位置存在偏移量,可以通过软件预先设置,而a位置、b位置和c位置相对于初始位置的偏转角度是相同的,因此,可大大简化编程;针对不同车型,也只需修改a位置、b位置和c位置相对于初始位置的偏转角度参数,无需像现有技术一样,需要修改n极磁环521和s极磁环522的尺寸,大大降低了成本。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1