电机驱动电路的制作方法
1.本发明涉及一种电机驱动电路,特别涉及足式机器人运动关节处的电机驱动电路。
背景技术:
2.相对于移动机器人产业中的轮式机器人和履带式机器人,足式移动机器人地形适应能力更强,运动速度更快,能够在室内或者户外各种复杂地形环境下灵活的避障运动。同时,对足式移动机器人的运动控制能力,轻型化能力,可续航能力提出了更高的要求。现有足式移动机器人的运动关节采用的电机驱动系统中往往存在电路分离器件多,设计复杂,功能集成度低,抗干扰能力弱;在电机转动出现问题时,反馈机制不明显,电机驱动系统无法及时响应,上位机难以监控各功能电路状况等问题。
技术实现要素:
3.本发明的主要目的是提供一种电机驱动电路,旨在解决现有技术中电机驱动系统中抗干扰能力弱以及在电机转动出现问题时无法及时响应的问题。
4.一种电机驱动电路,用于驱动电机装置;所述电机驱动电路包括:
5.高侧开关模块,电性连接在所述电源模块和所述电机装置之间,用于在闭合时将所述电源电压提供给所述电机装置;所述高侧开关模块包括至少两个高侧开关单元;每个所述高侧开关单元包括高侧晶体管以及高侧二极管;所述高侧二极管的正极与所述高侧晶体管的控制端电性连接,所述高侧二极管的负极与所述电机驱动模块电性连接;
6.低侧开关模块,电性连接在所述电源模块和所述电机装置之间,用于在闭合时将所述电源电压提供给所述电机装置;所述低侧开关模块包括至少两个低侧开关单元;所述低侧开关单元包括低侧晶体管以及低侧二极管;所述低侧二极管的正极与所述低侧晶体管的控制端电性连接,所述低侧二极管的负极与所述电机驱动模块电性连接;
7.电机驱动模块,分别与所述高侧开关模块、所述低侧开关模块、控制模块以及所述电机装置电性连接;所述电机驱动模块用于在正常工作时输出第一驱动信号控制所述高侧开关模块的闭合与断开,并输出第二驱动信号控制所述低侧开关模块的闭合与断开,且控制所述高侧开关模块和所述低侧开关模块交替闭合;以及
8.所述控制模块,用于输出控制信号给所述电机驱动模块,以控制所述电机驱动模块输出所述第一驱动信号以及所述第二控制信号。
9.上述电机驱动电路,通过设置通过所述高侧二极管以及所述低侧二极管,加速关断响应速度,降低了器件损耗。
附图说明
10.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
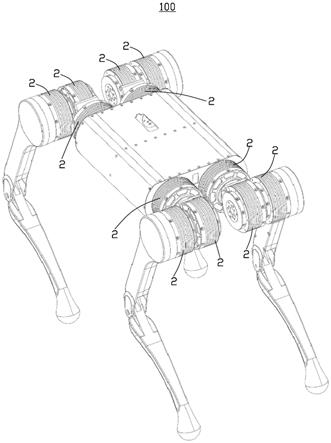
11.图1为本发明的足式机器人的立体示意图。
12.图2为本发明电机驱动电路的模块示意图。
13.图3为图2中所述控制模块、所述电机驱动模块、所述系统参数侦测模块以及所述接口模块的电路图。
14.图4为图2中所述电机装置、所述高侧开关模块以及所述电源模块的电路示意图。
15.图5为图2中所述低侧开关模块的电路示意图。
16.主要元件符号说明
17.足式机器人
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
18.电机驱动电路
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ119.电机装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ220.电源模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
21.高侧开关模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
22.低侧开关模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
23.电机驱动模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
24.控制模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
25.系统参数侦测模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
60
26.接口模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
70
27.电源单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
28.输入端子
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
mg1
‑
mg3
29.保护单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
30.第一储能电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
ce1
31.第二储能电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
ce2
32.第一滤波电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c1
33.第二滤波电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c2
34.第三滤波电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c3
35.第四滤波电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c4
36.瞬态二极管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
d1
37.第一接地端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
pgnd
38.高侧开关单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21a
‑
21c
39.高侧驱动引脚
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
gha
‑
ghc
40.高侧反馈引脚
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
sha
‑
shc
41.高侧限流电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r1a
‑
r1c
42.高侧晶体管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
q1a
‑
q1c
43.高侧并联电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r2a
‑
r2c
44.高侧二极管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
d2a
‑
d2c
45.高侧下拉电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
rp1a
‑
rp1c
46.高侧电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c1a
‑
c1c
47.低侧开关单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31a
‑
31c
48.低侧驱动引脚
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
gla
‑
glc
49.低侧第一检测引脚
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
spa
‑
spc
50.低侧第二检测引脚
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
sna
‑
snc
51.低侧限流电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r3a
‑
r3c
52.低侧晶体管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
q2a
‑
q2c
53.低侧并联电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r4a
‑
r4c
54.低侧二极管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
d3a
‑
d3c
55.低侧下拉电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
rp2a
‑
rp2c
56.低侧电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c2a
‑
c2c
57.低侧电流检测电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
rda
‑
rdc
58.电机驱动芯片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
u2
59.直流电源单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41
60.储能电感
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l1
61.第一反馈电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
rr1
62.第二反馈电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
rr2
63.负载限流电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
rl
64.续流二极管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
d4
65.第一电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
ca1
66.第二电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
ca2
67.第一隔离磁珠
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l3
68.第二隔离磁珠
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l4
69.发光二极管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
d5
70.第一电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r10
71.控制芯片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
u1
72.数据接口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
j1
73.第一侦测单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
61
74.第二侦测单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62
75.第三侦测单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
63
76.第一分压电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r5
77.第二分压电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r6
78.稳压二极管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
d3
79.第二接地端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
gnd
80.热敏电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
re1
81.第三分压电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r7
82.电压检测复位芯片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
u3
83.第一电源滤波电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
cd
84.通信芯片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
u4
85.上位机接口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
j2
86.第一信号匹配电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r8
87.第二信号匹配电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r9
88.第一滤波耦合电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c5
89.第二滤波耦合电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c6
90.第二电源滤波电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
cb
91.第三电源滤波电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
cc1
‑
cc5
92.电源引脚
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
vdd1
‑
vdd5
93.有源晶振
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
x1
94.时钟匹配电阻
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
rm
95.电机通信接口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
j3
96.第一侦测滤波电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c7
97.第二侦测滤波电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
c8
98.如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
99.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
100.本发明的说明书及上述附图中的术语“第一”、“第二”和“第三”等是用于区别不同对象,而非用于描述特定顺序。此外,术语“包括”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或模块的过程、方法、系统、产品或设备没有限定于已列出的步骤或模块,而是可选地还包括没有列出的步骤或模块,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或模块。
101.下面结合附图对本发明的电机驱动电路具体实施方式进行说明。
102.请参照图1,其为本发明足式机器人100的立体图。在本实施方式中,所述足式机器人100中具有12个电机装置2,每一个电机装置2对应一个电机驱动电路1,所述电机驱动电路1设置于电机装置2的内部且用于控制电机装置2运行,在其他实施方式中,所述驱动电路1也可设置于电机装置2的外部。所述电机装置2之间相互配合以控制所述足式机器人100的四足行走。下面将以其中一个所述电机装置2及其对应的电机驱动电路1(如图2所示)为例进行说明。
103.请参照图2,其为所述电机驱动电路1的模块示意图。所述电机驱动电路1用于驱动足式机器人100中的电机装置2。其中,所述在本发明的至少一个实施方式中,所述电机装置2为高转矩三相直流电机。在其他实施方式中,所述电机装置2还可以为单相电机。所述电机装置2包括三个输入端子mg1
‑
mg3。所述电机装置2的工作电压范围为36
‑
48伏特(v)。所述电机装置2的额定驱动电流为5安培(a),最大扭矩可达6牛米(nm)。所述电机装置2的最大转速可以为2000转/分(revolutions per minute,rpm)。所述电机装置2的额定功率为600瓦特(w)。
104.所述电机驱动电路1包括电源模块10、高侧开关模块20、低侧开关模块30、电机驱动模块40、控制模块50、系统参数侦测模块60以及接口模块70。
105.请参照图4,其为所述电机装置2、所述高侧开关模块20以及所述电源模块10的电路示意图。所述电源模块10用于给所述电机装置2提供电源电压。所述电源模块10通过所述高侧开关模块20与所述电机装置2电性连接。所述电源模块10包括电源单元11以及保护单元12。在本发明的至少一个实施例中,所述电源单元11为锂电池动力电池包,其电池容量为500瓦时(wh)。在正常工作时,所述电源单元11的电源电压为44伏(v),输出电流为10安培(a)。所述电源单元11的充电功率为250瓦特(w)。所述电源单元11的重量为2公斤。所述电源单元11用于输出所述电源电压。所述电源单元11的正极端子与所述高侧开关模块20电性连接,所述电源单元11的负极端子与第一接地端pgnd电性连接。所述保护单元12电性连接在所述电源单元11的正极端子和所述高侧开关模块20之间。所述保护单元12用于进行滤波和储能保护,防止所述电源单元11的波动影响所述电机驱动电路1内的其他模块。所述保护单元12包括第一储能电容ce1、第二储能电容ce2、第一滤波电容c1、第二滤波电容c2、第三滤波电容c3、第四滤波电容c4以及瞬态二极管d1。所述第一储能电容ce1、所述第二储能电容ce2、所述第一滤波电容c1、所述第二滤波电容c2、所述第三滤波电容c3以及所述第四滤波电容c4并联连接在所述电源单元11的正极端子和所述第一接地端pgnd之间。所述第一储能电容ce1和所述第二储能电容ce2为大容量电解电容,用于平缓所述电源单元11的波动。所述瞬态二极管d1的第一端与所述电源单元11的正极端子电性连接,所述瞬态二极管d1的第二端与所述第一接地端pgnd电性连接。
106.请参照图4,所述高侧开关模块20与所述电机装置2、所述电源模块10以及所述电机驱动模块40电性连接。所述高侧开关模块20用于建立或断开所述电机驱动模块40和所述电源模块10与所述电机装置2之间的电性连接。在本发明的至少一个实施方式中,所述高侧开关模块20包括三个高侧开关单元21a
‑
21c。在其他实施方式中,所述高侧开关单元21a
‑
21c的数量可以根据所述电机装置2的类型进行调整。每个所述高侧开关单元21a
‑
21c对应一个所述输入端子mg1
‑
mg3,且与所述电机驱动模块40内的高侧驱动引脚gha
‑
ghc以及高侧反馈引脚sha
‑
shc电性连接。每个所述高侧开关单元21a
‑
21c具有相同的电路结构。下面以所述高侧开关单元21a为例进行说明。
107.请参照图4,所述高侧开关单元21a包括高侧限流电阻r1a、高侧晶体管q1a、高侧并联电阻r2a、高侧二极管d2a、高侧下拉电阻rp1a以及高侧电容c1a。所述高侧晶体管q1a用于建立或断开所述高侧驱动引脚gha与所述电机装置2之间的电性连接。所述高侧晶体管q1a的控制端通过所述高侧限流电阻r1a与对应的所述高侧驱动引脚gha电性连接,所述高侧晶体管q1a的第一连接端与所述输入端子mg1电性连接,所述高侧晶体管q1a的第二连接端与所述电源单元11的正极端子电性连接。所述高侧限流电阻r1a用于控制所述高侧晶体管q1a的导通稍微变慢,避免过驱动。所述高侧并联电阻r2a的一端与所述高侧驱动引脚gha电性连接,另一端通过所述高侧二极管d2a电性连接到所述高侧晶体管q1a的控制端。所述高侧二极管d2a的正极与所述高侧晶体管q1a的控制端电性连接,所述高侧二极管d2a的负极通过所述高侧并联电阻r2a与所述高侧驱动引脚gha电性连接。所述高侧并联电阻r2a和所述高侧二极管d2a用于加速所述高侧晶体管q1a的关断,以降低所述高侧晶体管q1a的关断损耗。同时,由于干扰源通常来自所述高侧开关模块20在闭合状态和断开状态的切换时产生
的高频噪声以及与所述电源模块10的线路上的电压跳变,采用反向连接方式的所述高侧二极管d2a可提高所述高侧开关模块20的抗干扰能力。所述高侧下拉电阻rp1a用于泄放所述高侧晶体管q1a的控制端的电压。所述高侧下拉电阻rp1a的一端与所述高侧晶体管q1a的控制端电性连接,另一端与所述高侧反馈引脚sha电性连接。所述高侧反馈引脚sha上的电压反馈所述高侧晶体管q1a的导通情况。所述高侧电容c1a用于吸收所述高侧晶体管q1a快速闭合和关断时产生的高频振动脉冲。所述高侧电容c1a的一端与所述高侧晶体管q1a的第一连接端电性连接,另一端与所述高侧晶体管q1a的第二连接端电性连接。在本发明的至少一个实施方式中,所述高侧晶体管q1a为n型金属氧化物半导体场效应晶体管(metal
‑
oxide
‑
semiconductor field effect transistor,mosfet),所述控制端为栅极,所述第一连接端为源极,所述第二连接端为漏极。在其他实施方式中,所述高侧并联电阻r2a可以省略,此时,所述高侧二极管d2a的负极与所述高侧驱动引脚gha电性连接。
108.在所述第一驱动信号为高电平时,所述高侧晶体管q1a
‑
q1c闭合,使得所述电源单元11的正极端子与所述输入端子mg1
‑
mg3电性连接,进而所述电源模块10给所述电机装置2供电。在所述第一驱动信号为低电平时,所述高侧晶体管q1a
‑
q1c断开,断开所述电源单元11的正极端子与所述输入端子mg1
‑
mg3之间的电性连接,进而所述电源模块10停止给所述电机装置2供电。
109.请一并参照图5,其为图2中所述低侧开关模块30的电路示意图。所述低侧开关模块30与所述电机装置2以及所述电机驱动模块40电性连接。所述低侧开关模块30用于建立或断开所述电机驱动模块40与所述电机装置2之间的电性连接。在本发明的至少一个实施方式中,所述低侧开关模块30包括三个低侧开关单元31a
‑
31c。在其他实施方式中,所述低侧开关单元31a
‑
31c的数量可以根据所述电机装置2的类型进行调整。每个所述低侧开关单元31a
‑
31c对应一个所述输入端子mg1
‑
mg3,且与所述电机驱动模块40内的低侧驱动引脚gla
‑
glc、低侧第一检测引脚spa
‑
spc以及低侧第二检测引脚sna
‑
snc电性连接。每个所述低侧开关单元31a
‑
31c具有相同的电路结构。下面以所述低侧开关单元31a为例进行说明。
110.请参照图5,所述低侧开关单元31a包括低侧限流电阻r3a、低侧晶体管q2a、低侧并联电阻r4a、低侧二极管d3a、低侧下拉电阻rp2a、低侧电容c2a以及低侧电流检测电阻rda。所述低侧晶体管q2a用于建立或断开所述低侧驱动引脚gla与所述电机装置2之间的电性连接。所述低侧晶体管q2a的控制端通过所述低侧限流电阻r3a与对应的所述低侧驱动引脚gla电性连接,所述低侧晶体管q2a的第一连接端与所述输入端子mg1电性连接,所述低侧晶体管q2a的第二连接端通过所述低侧电流检测电阻rda与所述第一接地端pgnd电性连接,且与所述电机驱动模块40的低侧第一检测引脚spa电性连接。所述低侧限流电阻r3a用于控制所述低侧晶体管q2a的导通稍微变慢,避免过驱动。所述低侧并联电阻r4a的一端与所述低侧驱动引脚gla电性连接,另一端通过所述低侧二极管d3a电性连接到所述低侧晶体管q2a的控制端。所述低侧二极管d2a的正极与所述低侧晶体管q2a的控制端电性连接,所述低侧二极管d3a的负极与所述低侧并联电阻r4a。所述低侧并联电阻r4a和所述低侧二极管d3a用于加速所述低侧晶体管q2a的关断,以降低所述低侧晶体管q2a的关断损耗。同时,由于干扰源通常来自所述低侧开关模块30在闭合状态和断开状态的切换时产生的高频噪声以及与所述电源模块10的线路上的电压跳变,采用反向连接方式的所述低侧二极管d3a可提高所述低侧开关模块30的抗干扰能力。所述低侧下拉电阻rp2a用于泄放所述低侧晶体管q2a的
控制端的电压。所述低侧下拉电阻rp2a的一端与所述低侧晶体管q2a的控制端电性连接,另一端与所述低侧第一检测引脚spa电性连接。所述低侧电容c2a用于吸收所述低侧晶体管q2a快速闭合和关断时产生的高频振动脉冲。所述低侧电容c2a的一端与所述低侧晶体管q2a的第一连接端电性连接,另一端与所述低侧晶体管q2a的第二连接端电性连接。所述低侧电流检测电阻rda用于将流过所述电机装置2的所述输入端子mg1的电流转换为电压变化量提供给所述电机驱动模块40。所述低侧电流检测电阻rda的一端与所述低侧晶体管q2a的第二连接端电性连接,另一端与所述电机驱动模块40的低侧第二检测引脚sna电性连接。在本发明的至少一个实施方式中,所述低侧晶体管q2a为n型mosfet,所述控制端为栅极,所述第一连接端为源极,所述第二连接端为漏极。在其他实施方式中,所述低侧并联电阻r4a可以省略,此时,所述低侧二极管d3a的负极与所述低侧驱动引脚gha电性连接。
111.在所述第二驱动信号为高电平时,所述低侧晶体管q2a
‑
q2c闭合,使得所述输入端子mg1
‑
mg3通过所述低侧电流检测电阻rda
‑
rdc与所述第一接地端pgnd电性连接,进而形成电流闭环。在所述第二驱动信号为低电平时,所述低侧晶体管q2a
‑
q2c断开,断开所述输入端子mg1
‑
mg3与所述第一接地端pgnd之间的电性连接,进而切断所述电流闭环,并将所述电机装置2的电流转换为电压提供给所述电机驱动模块40,以检测所述电机装置2的运行状态。
112.请参照图3,其所述控制模块50、所述电机驱动模块40、所述系统参数侦测模块60以及接口模块70的电路图。所述电机驱动模块40与所述电机装置2、所述高侧开关模块20、所述低侧开关模块30以及所述控制模块50电性连接。在本发明的实施方式中,所述电机驱动模块40包括电机驱动芯片u2。在本发明的至少一个实施方式中,所述电机驱动芯片u2的型号为drv8323rsrgzr。所述电机驱动芯片u2通过所述高侧反馈引脚sha
‑
shc、所述低侧第一检测引脚spa
‑
spc以及所述低侧第二检测引脚sna
‑
snc检测所述电机装置2的转动是否存在异常。在所述电机装置2的转动异常时,所述电机驱动芯片u2直接调整或停止输出所述第一驱动信号以及所述第二驱动信号。在本发明的至少一个实施方式中,所述电机装置2的转动异常可以包括vm欠压闭锁状态(under voltage lock out,uvlo)、电荷泵欠压状态(charge pump under voltage,cpuv)、晶体管过流状态(over current protection,ocp)、栅极驱动器故障(gate driver fault,gdf)、热警告(over temperature warning,otw)和热关断(over temperature shut down,otw/otsd)等情况。所述电机驱动芯片u2还接收所述控制模块50的控制信号并转换为第一驱动信号给所述高侧开关模块20以及第二驱动信号给所述低侧开关模块30。在正常工作时,所述电机驱动芯片u2控制所述第一驱动信号以及所述第二驱动信号交替处于高电平。即,在所述第一驱动信号为高电平时,所述第二驱动信号处于低电平;在所述第一驱动信号处于低电平时,所述第二驱动信号处于高电平。在停止工作时,所述第一驱动信号和所述第二驱动信号同时处于低电平。所述第一驱动信号用于控制所述高侧开关模块20在闭合状态和断开状态之间切换。所述第二驱动信号控制所述低侧开关模块30在闭合状态和断开状态之间切换。所述电机驱动芯片u2与所述控制模块50之间进行通信。在本发明的至少一个实施方式中,所述电机驱动芯片u2的峰值拉电流处于10ma至1a,所述电机驱动芯片u2的峰值灌电流处于20ma至2a。
113.请参照图3,所述电机驱动模块40进一步地包括直流电源单元41。所述直流电源单元41用于根据所述电源模块10提供的高压转换为第一电压并提供给所述控制模块50以及
所述系统参数侦测模块60。所述直流电源单元41包括储能电感l1、续流二极管d4、第一电容ca1、第二电容ca2、第一反馈电阻rr1、第二反馈电阻rr2以及负载限流电阻rl。所述储能电感l1用于存储所述直流电源单元41的开关电能。所述储能电感l1的输入端与所述电机驱动芯片u2的开关引脚电性连接,所述储能电感l1的输出端通过所述负载限流电阻rl与所述控制模块50电性连接。所述第一电容ca1和所述第二电容ca2用于滤除所述储能电感l1输出的电压内的高频电压分量,并存储流向所述控制模块50的能量。所述第一电容ca1的第一端连接于所述储能电感l1和所述负载限流电阻rl之间,另一端与所述第一接地端pgnd电性连接。所述第二电容ca2的第一端连接于所述储能电感l1和所述负载限流电阻rl之间,另一端与所述第一接地端pgnd电性连接。所述续流二极管d4的正极与所述第一接地端rgnd电性连接,所述续流二极管d4的负极与所述储能电感l1的输入端电性连接。所述第一反馈电阻rr1和所述第二反馈电阻rr2用于将所述储能电感l1输出的电压反馈给所述电机驱动芯片u2,以保持所述直流电源单元41稳定输出所述第一电压v1。所述第一反馈电阻rr1的一端与所述电机驱动芯片u2电性连接,另一端与所述储能电感l1的输出端电性连接。所述第二反馈电阻rr2的一端与所述电机驱动芯片u2以及所述第一反馈电阻rr1与所述电机驱动芯片u2连接的一端电性连接,另一端与所述第一接地端pgnd电性连接。本发明的至少一个实施方式中,所述第一电压v1为3.3v。
114.请参照图3,所述电机驱动模块40进一步地还包括第一隔离磁珠l3以及二隔离磁珠l4。所述第一隔离磁珠l3以及所述第二隔离磁珠l4用于防止功率地的电势对数字电路产生干扰。所述干扰是指在所述高侧开关模块20和所述低侧开关模块30在闭合状态和断开状态之间切换时会产生的高频噪声以及与所述直流电源单元41或所述电源模块10的线路上的电压跳变。所述第一隔离磁珠l3的一端与所述第一接地端pgnd电性连接,另一端与第二接地端gnd电性连接,所述第二隔离磁珠l4的一端与所述第一接地端pgnd电性连接,另一端与所述第二接地端gnd电性连接。
115.请参照图3,所述控制模块50与所述电机驱动模块40、所述系统参数侦测模块60以及接口模块70电性连接。所述控制模块50用于输出控制信号给所述电机驱动模块40,以控制所述电机驱动模块40输出所述第一驱动信号以及第二驱动信号。在本发明的至少一个实施方式中,所述控制信号为电压空间矢量脉冲调制信号(space vector pulse width modulation,svpwm)。所述控制模块50包括控制芯片u1。所述控制芯片u1与所述电机驱动芯片u2之间通过串行外设接口(serial peripheral interface,spi)进行通信,使得所述电机驱动芯片u2可将侦测到的所述电机装置2的运行参数传送给所述控制模块50,进而所述控制模块50调整或停止所述电机驱动芯片u2的工作状态。在本发明的至少一个实施方式中,所述控制芯片u1的型号为stm32g474。
116.请参照图3,所述系统参数侦测模块60用于检测所述电机驱动电路1中的指定参数。其中,所述指定参数可包括所述电源模块10的电源电压、所述控制模块50的上电电压以及所述电机装置2的温度。所述系统参数侦测模块60包括第一侦测单元61、第二侦测单元62以及第三侦测单元63。
117.请参照图3,所述第一侦测单元61电性连接于所述电源模块10和所述控制模块50之间。所述第一侦测单元61用于侦测所述电源模块10的电源电压并产生侦测电压给所述控制模块50。所述第一侦测单元61包括第一分压电阻r5、第二分压电阻r6、第一侦测滤波电容
c7以及稳压二极管d3。所述第一分压电阻r5和所述第二分压电阻r6构成分压电路,以对所述电源模块10的所述电源电压进行分压后产生侦测电压给所述控制模块50。所述第一分压电阻r5的一端与所述电源单元11的正极端子电性连接,另一端与所述控制芯片u1的电压侦测引脚电性连接。所述第二分压电阻r6的一端通过所述第一分压电阻r5与所述电源单元11的正极端子电性连接,所述第二分压电阻r6的另一端与所述第二接地端gnd电性连接。所述稳压二极管d3的正极与所述第二接地端gnd电性连接,所述稳压二极管d3的负极通过所述第一分压电阻r5与所述电源单元11的正极端子电性连接。所述稳压二极管d3用于将所述第一分压电阻r5上的电压钳位在预定值,以防止所述电源单元11的正极端子的电源电压波动时对所述控制模块50产生冲击。所述第一侦测滤波电容c7的一端通过所述第一分压电阻r5与所述电源单元11的正极端子电性连接,另一端与所述第二接地端gnd电性连接。
118.请参照图3,所述控制模块50还用于根据所述侦测电压识别所述电源模块10的电源电压是否在预设电压范围内。在所述侦测电压在所述预设电压范围内,则所述控制模块50识别所述电源模块10的电源电压正常。在所述侦测电压位于所述预设电压范围之外时,则所述控制模块50识别所述电源模块10的电源电压异常,并产生异常控制信号给所述电机驱动模块40。所述预设电压范围包括高压阈值以及低压阈值,且所述低压阈值小于所述高压阈值。在所述侦测电压大于所述高压阈值时,则识别所述电源模块10的电源电压过高,所述控制模块50控制所述电机驱动模块40停止工作。在所述侦测电压小于所述低压阈值时,则识别所述电源模块10的电源电压过低,所述控制模块50产生所述异常控制信号,并可产生提示信号通过所述接口模块70提供给上位机,以提示所述电源模块10需要进行充电。在本发明的至少一个实施方式中,在所述电源模块10的电源电压大于60v时,所述控制模块50输出所述异常控制信号,以控制所述电机驱动模块40停止工作。
119.请参照图3,所述第二侦测单元62与所述控制模块50电性连接。所述第二侦测单元62用于侦测所述电机装置2的温度并转换为温度感测电压提供给所述控制模块50。所述第二侦测单元62包括热敏电阻re1、第二侦测滤波电容c8以及第三分压电阻r7。所述热敏电阻re1固定在所述电机装置2内。所述热敏电阻re1的一端接收所述第一电压v1,另一端与所述控制模块50的温度感测引脚电性连接。所述第三分压电阻r7的一端通过所述热敏电阻re1接收所述第一电压v1,另一端与所述第二接地端gnd电性连接。所述第二侦测滤波电容c8的一端与所述热敏电阻re1电性连接,另一端与所述第二接地端gnd电性连接。
120.在本发明的至少一个实施方式中,在所述电机装置2的电机温度过高时,导致所述热敏电阻re1的阻值变大,进而使得所述温度感测引脚的感测电压变小,所述控制模块50进一步地在所述温度感测电压小于温度阈值电压时调整所述电机驱动模块40输出的所述第一驱动信号以及所述第二驱动信号,以降低所述电机装置2的转速或控制所述电机装置2停止转动。
121.请参照图3,所述第三侦测单元63与所述控制模块50电性连接。所述第三侦测单元63在所述控制模块50处于工作状态时检测所述控制模块50的所述上电电压,并在所述上电电压异常时产生复位信号给所述控制模块50,以控制所述控制模块50处于暂停工作状态。所述第三侦测电源63进一步地在所述电机驱动电路1工作在上电阶段时输出所述复位信号给所述控制模块50,以维持所述控制模块50处于暂停工作状态,并在所述上电阶段结束时输出初始信号给所述控制模块50以控制所述控制模块50处于所述工作状态。在本发明的至
少一个实施方式中,所述上电阶段至少为140毫秒。所述第三侦测单元63包括电压检测复位芯片u3以及第一电源滤波电容cd。所述电压检测复位芯片u3的侦测引脚接收所述第一电压v1电性连接,所述电压检测复位芯片u3的信号输出引脚与所述控制芯片u1的重置引脚电性连接。所述第一电源滤波电容cd的一端接收所述第一电压v1,另一端与所述第二接地端gnd电性连接。在本发明的至少一个实施方式中,所述电压检测复位芯片u3的型号为max809。
122.请参照图3,所述接口模块70与所述控制模块50电性连接。所述接口模块70用于建立所述控制模块50与上位机之间的数据通信。所述接口模块70包括通信芯片u4、上位机接口j2、第一信号匹配电阻r8、第二信号匹配电阻r9、第一滤波耦合电容c5、第二滤波耦合电容c6以及第二电源滤波电容cb。所述通信芯片u4的与所述控制芯片u1的两个串口通信引脚电性连接,且与所述上位机接口j2电性连接。所述第一信号匹配电阻r8的一端与所述第二信号匹配电阻r9串联连接,另一端通过所述第一滤波耦合电容c5与所述第二接地端gnd电性连接且与所述通信芯片u4的第一连接引脚电性连接。所述第二信号匹配电阻r9的另一端通过所述第二滤波耦合电容c6与所述第二接地端gnd电性连接且与所述通信芯片u4的第二连接引脚电性连接。所述通信芯片u4的第一连接引脚和所述第二连接引脚与所述上位机接口j2电性连接。所述第二电源滤波电容cb的两端分别连接在所述通信芯片u4的电源引脚以及接地引脚之间。所述第二电源滤波电容c7用于去除所述通信芯片u4的电源噪声。在本发明的至少一个实施方式中,所述通信芯片u4为can
‑
fd通信芯片tja1044v,所述上位机接口j2为can
‑
fd连接座。
123.请参照图3,所述控制芯片u1的输入时钟引脚与有源晶振x1的时钟输出引脚电性连接。所述有源晶振x1产生稳定的时钟信号给所述控制芯片u1,以保证各种数据的传输顺序以及同步情况。所述控制模块50进一步还包括时钟匹配电阻rm。所述时钟匹配电阻rm串联在所述有源晶振x1的时钟输出引脚和所述控制芯片u1的输入时钟引脚之间。所述时钟匹配电阻rm用于保证时钟信号的阻抗匹配。
124.请参照图3,所述控制模块50还包括数据接口j1。所述数据接口j1为所述控制芯片u1的下载软件程序和串口打印信息显示连接座。所述数据接口j1与所述控制芯片u1电性连接。所述控制芯片u1通过所述数据接口j1与电子设备(图未示)建立连接,可在所述电子设备上显示所述控制芯片u1的运行情况,并可根据操作产生调试信号或测试信号给所述控制芯片u1。
125.请参照图3,所述控制模块50进一步还包括五个第三电源滤波耦合电容cc1
‑
cc5。每个所述第三电源滤波耦合电容cc1
‑
cc5分别电性连接于所述控制芯片u1的对应电源引脚vdd1
‑
vdd5和所述第二接地端gnd之间。所述第三电源滤波耦合电容cc1
‑
cc5用于避免电源噪声,保证所述控制芯片u1的正常工作。
126.请参照图3,所述控制模块50还包括发光二极管d5以及第一电阻r10。所述第一电阻r10的一端与所述控制芯片u1的显示控制引脚电性连接,另一端与所述发光二极管d5的正极电性连接。所述发光二极管d5的负极与所述第二接地端gnd电性连接。在所述控制芯片u1处于工作状态时,所述显示控制引脚输出pwm信号控制所述发光二极管d5闪烁,以提示所述控制芯片u1的工作状态。
127.请参照图3,所述控制模块50进一步还包括电机通信接口j3。所述电机通信接口j3用于与所述电机装置2中的霍尔小板进行通信。在本发明的至少一个实施方式中,所述电机
通信接口j3与所述电机装置2之间采用rs232通信协议进行传输。所述控制芯片u1的第三输出引脚以及第三接收引脚分别与所述电机通信接口j3的第二引脚以及第三引脚电性连接。所述电机通信接口j3的第一引脚与所述发光二极管d5的阴极电性连接。所述电机通信接口j3通过线缆连接到所述电机装置2中的霍尔传感器上,进而将所述电机装置2内的霍尔传感器参数提供给所述控制模块50,作为所述控制模块50判断所述电机装置2的运转是否正常的依据。
128.上述所述电机驱动电路1,通过将所述高侧晶体管q1a
‑
q1c以及所述低侧晶体管q2a
‑
q2c直接与所述电机装置2电性连接,无需多余的分离器件,通过所述高侧二极管d1a
‑
d1c以及所述低侧二极管d3a
‑
d3c,加速关断响应速度,降低了器件损耗,通过设置所述高侧下拉电阻rp1a
‑
rp1c以及所述低侧下拉电阻rp2a
‑
rp2c,对所述高侧晶体管q1a
‑
q1c以及所述低侧晶体管q2a
‑
q2c的栅极电压进行泄放,通过设置所述高侧电容c1a
‑
c1c以及所述低侧电容c2a
‑
c2c,可吸收高频脉冲,进而降低所述高侧开关模块20以及低侧开关模块30的辐射。同时,通过设置所述第一侦测单元61、所述第二侦测单元62以及第三侦测单元63对所述电机驱动电路1中的电源电压、所述电机装置2内的实时温度以及所述控制芯片u1的上电电压进行监控,可对异常情况进行监控并及时调整控制,增强了所述电机驱动电路1的稳定性和抗干扰能力。另外,所述电机驱动模块40还可对所述电机装置2的电流进行检测,并在存在异常时调整驱动所述电机装置2的第一驱动信号以及第二驱动信号。
129.还需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
130.以上所述,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1