控制飞轮储能阵列系统的方法、装置、存储介质及控制器
1.本公开涉及飞轮储能技术领域,具体地,涉及一种控制飞轮储能阵列系统的方法、装置、存储介质及控制器。
背景技术:
2.随着新能源及并网技术的发展,新能源在电网中所占的比率越来越高,而新能源尤其是风力发电受自然环境的影响巨大,风电的大规模并网会影响电网系统的稳定性和电能质量等。
3.相关技术中,为了提高电网的稳定性和电能质量,通过飞轮储能阵列系统将电能转换成机械能并存储在高速旋转的飞轮中,当需要用电时再由飞轮带动发电机发电,通过飞轮的升速和降速实现能量的存储和释放。但是,飞轮储能阵列系统中的飞轮储能单元和网侧均通过逆变器接入电网,缺乏传统同步机的阻尼特性和惯性特性,导致电网系统的稳定性较低。
技术实现要素:
4.为了解决上述问题,本公开提供一种控制飞轮储能阵列系统的方法、装置、存储介质及控制器。
5.第一方面,本公开提供一种控制飞轮储能阵列系统的方法,所述方法包括:
6.采集飞轮储能阵列系统的并网点的实时电压和实时电流;
7.根据所述实时电压确定所述飞轮储能阵列系统是否存在对称故障;
8.在确定所述飞轮储能阵列系统存在对称故障的情况下,根据所述实时电压和所述实时电流确定参考电压;
9.根据所述参考电压,调整所述飞轮储能阵列系统的网侧的逆变器的输出电压。
10.可选地,所述根据所述实时电压确定所述飞轮储能阵列系统是否存在对称故障包括:
11.获取预设基准电压;
12.根据所述实时电压和所述预设基准电压,确定所述飞轮储能阵列系统是否存在对称故障。
13.可选地,所述根据所述实时电压和所述预设基准电压,确定所述飞轮储能阵列系统是否存在对称故障包括:
14.确定所述实时电压与所述预设基准电压的比值;
15.在所述比值小于或等于预设比值阈值的情况下,确定所述实时电压对应的三相电压是否同时跌落;
16.在所述实时电压对应的三相电压同时跌落的情况下,确定所述飞轮储能阵列系统存在对称故障。
17.可选地,所述根据所述实时电压和所述实时电流确定参考电压包括:
18.根据所述实时电压和所述实时电流,确定所述飞轮储能阵列系统对应的实际有功功率和实际无功功率;
19.根据所述实际有功功率,确定目标电压相角;
20.根据所述实际无功功率,确定目标电压幅值;
21.根据所述目标电压相角和所述目标电压幅值,确定所述参考电压。
22.可选地,所述方法还包括:
23.获取所述飞轮储能阵列系统的网侧对应的预设网侧最大电流;
24.根据所述预设网侧最大电流,确定所述网侧对应的网侧参考电流;
25.根据所述网侧参考电流,控制所述网侧的输出电流。
26.可选地,所述方法还包括:
27.获取所述飞轮储能阵列系统的飞轮单元侧对应的预设飞轮最大电流;
28.根据所述预设飞轮最大电流,确定所述飞轮单元侧对应的飞轮参考电流;
29.根据所述飞轮参考电流,控制所述飞轮单元侧的输出电流。
30.第二方面,本公开提供一种控制飞轮储能阵列系统的装置,所述装置包括:
31.采集模块,用于采集飞轮储能阵列系统的并网点的实时电压和实时电流;
32.故障确定模块,用于根据所述实时电压确定所述飞轮储能阵列系统是否存在对称故障;
33.电压确定模块,用于在确定所述飞轮储能阵列系统存在对称故障的情况下,根据所述实时电压和所述实时电流确定参考电压;
34.调整模块,用于根据所述参考电压,调整所述飞轮储能阵列系统的网侧的逆变器的输出电压。
35.可选地,所述故障确定模块,还用于:
36.获取预设基准电压;
37.根据所述实时电压和所述预设基准电压,确定所述飞轮储能阵列系统是否存在对称故障。
38.可选地,所述故障确定模块,还用于:
39.确定所述实时电压与所述预设基准电压的比值;
40.在所述比值小于或等于预设比值阈值的情况下,,确定所述实时电压对应的三相电压是否同时跌落;
41.在所述实时电压对应的三相电压同时跌落的情况下,确定所述飞轮储能阵列系统存在对称故障。
42.可选地,所述电压确定模块,还用于:
43.根据所述实时电压和所述实时电流,确定所述飞轮储能阵列系统对应的实际有功功率和实际无功功率;
44.根据所述实际有功功率,确定目标电压相角;
45.根据所述实际无功功率,确定目标电压幅值;
46.根据所述目标电压相角和所述目标电压幅值,确定所述参考电压。
47.可选地,所述装置还包括:
48.第一电流获取模块,用于获取所述飞轮储能阵列系统的网侧对应的预设网侧最大
电流;
49.第一电流确定模块,用于根据所述预设网侧最大电流,确定所述网侧对应的网侧参考电流;
50.第一控制模块,用于根据所述网侧参考电流,控制所述网侧的输出电流。
51.可选地,所述装置还包括:
52.第二电流获取模块,用于获取所述飞轮储能阵列系统的飞轮单元侧对应的预设飞轮最大电流;
53.第二电流确定模块,用于根据所述预设飞轮最大电流,确定所述飞轮单元侧对应的飞轮参考电流;
54.第二控制模块,用于根据所述飞轮参考电流,控制所述飞轮单元侧的输出电流。
55.第三方面,本公开提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本公开第一方面所述方法的步骤。
56.第四方面,本公开提供一种控制器,包括:存储器,其上存储有计算机程序;处理器,用于执行所述存储器中的所述计算机程序,以实现本公开第一方面所述方法的步骤。
57.通过上述技术方案,通过周期性采集飞轮储能阵列系统的并网点的实时电压和实时电流;根据所述实时电压确定所述飞轮储能阵列系统是否存在对称故障;在确定所述飞轮储能阵列系统存在对称故障的情况下,根据所述实时电压和所述实时电流确定参考电压;根据所述参考电压,调整所述飞轮储能阵列系统的网侧的逆变器的输出电压。也就是说,在飞轮储能阵列系统出现对称故障时,可以通过并网点的实时电压和实时电流确定参考电压,并通过该参考电压调整该飞轮储能阵列系统的网侧的逆变器的输出电压,这样,在飞轮储能阵列系统出现对称故障时可以不脱网运行,从而提高了电网的稳定性。
58.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
59.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
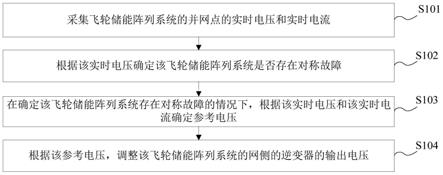
60.图1是本公开一示例性实施例示出的一种控制飞轮储能阵列系统的方法的流程图;
61.图2是本公开一示例性实施例示出的一种飞轮储能阵列系统的结构示意图;
62.图3是本公开一示例性实施例示出的另一种控制飞轮储能阵列系统的方法的流程图;
63.图4是本公开一示例性实施例示出的一种电压控制电路示意图;
64.图5是本公开一示例性实施例示出的一种电流控制电路示意图;
65.图6是本公开一示例性实施例示出的一种控制飞轮储能阵列系统的装置的框图;
66.图7是本公开一示例性实施例示出的第二种控制飞轮储能阵列系统的装置的框图;
67.图8是本公开一示例性实施例示出的第三种控制飞轮储能阵列系统的装置的框图;
68.图9是根据一示例性实施例示出的一种控制器的框图。
具体实施方式
69.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
70.在下文中的描述中,“第一”、“第二”等词汇,仅用于区分描述的目的,而不能理解为指示或暗示相对重要性,也不能理解为指示或暗示顺序。
71.以下结合具体的实施例对本公开进行说明。
72.图1是本公开一示例性实施例示出的一种控制飞轮储能阵列系统的方法的流程图,如图1所示,该方法可以包括:
73.s101、采集飞轮储能阵列系统的并网点的实时电压和实时电流。
74.其中,图2是本公开一示例性实施例示出的一种飞轮储能阵列系统的结构示意图,如图2所示,该飞轮储能阵列系统包括飞轮单元侧和网侧,该飞轮单元侧和该网侧通过逆变器连接,m/g为电机,飞轮单元侧包括多个并联的飞轮单元。
75.在本步骤中,在该飞轮储能阵列系统的阵列控制器启动后,可以采集并网点的实时电压和实时电流。
76.s102、根据该实时电压确定该飞轮储能阵列系统是否存在对称故障。
77.在本步骤中,在采集到并网点的实时电压和实时电流后,可以获取预设基准电压,根据该实时电压和该预设基准电压,确定该飞轮储能阵列系统是否存在对称故障。其中,可以确定该实时电压与该预设基准电压的比值,在该比值小于或等于预设比值阈值的情况下,确定该实时电压对应的三相电压是否同时跌落,在该实时电压对应的三相电压同时跌落的情况下,确定该飞轮储能阵列系统存在对称故障。示例地,该预设基准电压可以是220v,该预设比值阈值可以是1pu。
78.s103、在确定该飞轮储能阵列系统存在对称故障的情况下,根据该实时电压和该实时电流确定参考电压。
79.在本步骤中,在确定该飞轮储能阵列系统存在对称故障的情况下,可以根据该实时电压和该实时电流,确定该飞轮储能阵列系统对应的实际有功功率和实际无功功率,根据该实际有功功率和实际该无功功率,确定目标电压相角和目标电压幅值,并根据该目标电压相角和该目标电压幅值,确定该参考电压。
80.s104、根据该参考电压,调整该飞轮储能阵列系统的网侧的逆变器的输出电压。
81.在本步骤中,在确定该参考电压后,可以通过pwm(pulse width modulation,脉冲宽度调制)产生脉冲信号g1~g6,并将该脉冲信号g1~g6分别输入该飞轮储能阵列系统的网侧的逆变器的6个igbt(insulated gate bipolar transistor,绝缘栅双极型晶体管)的g端,以调整该逆变器的输出电压。
82.采用上述方法,在飞轮储能阵列系统出现对称故障时,可以通过并网点的实时电压和实时电流确定参考电压,并通过该参考电压调整该飞轮储能阵列系统的网侧的逆变器的输出电压,这样,在飞轮储能阵列系统出现对称故障时可以不脱网运行,从而提高了电网的稳定性。
83.图3是本公开一示例性实施例示出的另一种控制飞轮储能阵列系统的方法的流程图,如图3所示,该方法可以包括:
84.s301、采集飞轮储能阵列系统的并网点的实时电压和实时电流。
85.s302、根据该实时电压确定该飞轮储能阵列系统是否存在对称故障。
86.s303、在确定该飞轮储能阵列系统存在对称故障的情况下,根据该实时电压和该实时电流,确定该飞轮储能阵列系统对应的实际有功功率和实际无功功率。
87.其中,该实时电压包括实时d轴电压和实时q轴电压,该实时d轴电压和该实时q轴电压为dq坐标系下网侧逆变器的并网点电压的分量,该实时电流包括实时d轴电流和实时q轴电流,该实时d轴电流和该实时q轴电流为dq坐标系下网侧逆变器的并网点电流的分量。
88.在本步骤中,在确定该飞轮储能阵列系统存在对称故障的情况下,可以根据该实时电压和该实时电流,通过以下公式计算得到该飞轮储能阵列系统对应的实际有功功率:
[0089][0090]
其中,p
e
为该实际有功功率,e
d
为该实时d轴电压,e
q
为该实时q轴电压,i
d
为该实时d轴电流,i
q
为该实时q轴电流。
[0091]
通过以下公式计算得到该飞轮储能阵列系统对应的实际无功功率:
[0092][0093]
其中,q
e
为该实际无功功率。
[0094]
s304、根据该实际有功功率,确定目标电压相角。
[0095]
在本步骤中,在确定该实际有功功率后,可以获取预设有功功率、预设虚拟转动惯量、预设额定角频率以及预设虚拟阻尼系数,根据该实际有功功率、该预设有功功率、预设虚拟转动惯量、预设额定角频率以及预设虚拟阻尼系数,通过以下公式计算得到该目标电压相角:
[0096][0097]
其中,j
s
为该预设虚拟转动惯量、w
n
为该预设额定角频率、δw为虚拟同步发电机角频率相对于该预设额定角频率的偏差,p
ref
为该预设有功功率,d
p
为该预设虚拟阻尼系数,θ为该目标电压相角。
[0098]
s305、根据该实际无功功率,确定目标电压幅值。
[0099]
在本步骤中,在确定该实际无功功率后,可以获取预设无功功率、预设空载电势以及预设比例系数,根据该实际无功功率、该预设无功功率、该预设空载电势以及该预设比例系数,通过以下公式计算得到该目标电压幅值:
[0100]
e=e0+m(q
ref
‑
q
e
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0101]
其中,e为该目标电压幅值,e0为该预设空载电势,m为该预设比例系数,q
ref
为该预设无功功率。
[0102]
s306、根据该目标电压相角和该目标电压幅值,确定该参考电压。
[0103]
在本步骤中,在确定该目标电压相角和该目标电压幅值后,可以根据该目标电压相角和该目标电压幅值,通过脉冲发生器生成该参考电压。示例地,可以通过以下公式计算得到该参考电压:
[0104][0105]
其中,u为该参考电压的最大幅值,为该参考电压,u
a
、u
b
、u
c
为该参考电压对应的三相电压。
[0106]
图4是本公开一示例性实施例示出的一种电压控制电路示意图,如图4所示,在获取该实际有功功率和该实际无功功率后,可以将该实际有功功率和该实际无功功率作为该电路的输入,最终得到该脉冲信号g1~g6。其中,pulse generator为该脉冲发生器。
[0107]
s307、根据该参考电压,调整该飞轮储能阵列系统的网侧的逆变器的输出电压。
[0108]
s308、获取该飞轮储能阵列系统的网侧对应的预设网侧最大电流。
[0109]
其中,该预设网侧最大电流可以是该飞轮储能阵列系统的网侧逆变器允许通过的最大电流。
[0110]
s309、根据该预设网侧最大电流,确定该网侧对应的网侧参考电流。
[0111]
其中,该网侧参考电流可以包括d轴网侧参考电流和q轴网侧参考电流。
[0112]
在本步骤中,在得到该预设网侧最大电流后,可以重新设置该飞轮储能阵列系统的网侧逆变器输出有功功率指令p
0ref
(一般设为0),在逆变器不因过流损坏的前提下最大限度地向电网发出无功功率以支持电网的恢复。示例地,可以通过以下公式计算得到该d轴网侧参考电流和该q轴网侧参考电流:
[0113][0114]
其中,i
dref1
为该d轴网侧参考电流,i
qref1
为该q轴网侧参考电流,p
0ref
为该网侧逆变器输出的预设有功功率,i
max1
为该预设网侧最大电流。
[0115]
s310、根据该网侧参考电流,控制该网侧的输出电流。
[0116]
在本步骤中,在确定该飞轮储能阵列系统的网侧参考电流后,可以通过现有技术的电流内环控制策略控制该网侧的输出电流无静差跟踪该网侧参考电流,图5是本公开一示例性实施例示出的一种电流控制电路示意图,如图5所示,可以将该网侧逆变器输出的预设有功功率、该预设网侧最大电流、d轴网侧参考电流、该实时d轴电流以及该实时q轴电流作为该电路的输入,最终通过电流内环控制策略控制该网侧的输出电流。
[0117]
s311、获取该飞轮储能阵列系统的飞轮单元侧对应的预设飞轮最大电流。
[0118]
其中,该预设飞轮最大电流可以是该飞轮储能阵列系统的飞轮单元侧的逆变器允许通过的最大电流。
[0119]
s312、根据该预设飞轮最大电流,确定该飞轮单元侧对应的飞轮参考电流。
[0120]
其中,该飞轮参考电流可以包括d轴飞轮参考电流和q轴飞轮参考电流。
[0121]
在本步骤中,在获取该预设飞轮最大电流后,可以通过以下公式计算得到该d轴飞
轮参考电流和该q轴飞轮参考电流:
[0122][0123]
其中,i
m
为该飞轮单元侧限幅后的预设电流幅值,i
max2
为该预设飞轮最大电流,i
dref2
为该d轴飞轮参考电流,i
qref2
为该q轴飞轮参考电流。
[0124]
s313、根据该飞轮参考电流,控制该飞轮单元侧的输出电流。
[0125]
在本步骤中,在得到该飞轮参考电流后,可以通过adrc(active disturbance rejection control,自抗扰控制技术)闭环控制器控制该飞轮单元侧的输出电流无静差跟踪该飞轮参考电流。
[0126]
采用上述方法,在飞轮储能阵列系统出现对称故障时,可以通过并网点的实时电压和实时电流确定参考电压,并通过该参考电压调整该飞轮储能阵列系统的网侧的逆变器的输出电压,这样,在飞轮储能阵列系统出现对称故障时可以不脱网运行,从而提高了电网的稳定性。进一步地,还可以获取该飞轮储能阵列系统的飞轮单元侧对应的飞轮参考电流和网侧对应的网侧参考电流,并通过adrc闭环控制器控制该飞轮单元侧和该网侧的输出电流,这样,使得输出电流限幅和直流母线电压的稳定性更高。
[0127]
图6是本公开一示例性实施例示出的一种控制飞轮储能阵列系统的装置的框图,如图6所示,该装置可以包括:
[0128]
采集模块601,用于采集飞轮储能阵列系统的并网点的实时电压和实时电流;
[0129]
故障确定模块602,用于根据该实时电压确定该飞轮储能阵列系统是否存在对称故障;
[0130]
电压确定模块603,用于在确定该飞轮储能阵列系统存在对称故障的情况下,根据该实时电压和该实时电流确定参考电压;
[0131]
调整模块604,用于根据该参考电压,调整该飞轮储能阵列系统的网侧的逆变器的输出电压。
[0132]
可选地,该故障确定模块602,还用于:
[0133]
获取预设基准电压;
[0134]
根据该实时电压和该预设基准电压,确定该飞轮储能阵列系统是否存在对称故障。
[0135]
可选地,该故障确定模块602,还用于:
[0136]
确定该实时电压与该预设基准电压的比值;
[0137]
在该比值小于或等于预设比值阈值的情况下,,确定该实时电压对应的三相电压是否同时跌落;
[0138]
在该实时电压对应的三相电压同时跌落的情况下,确定该飞轮储能阵列系统存在对称故障。
[0139]
可选地,该电压确定模块603,还用于:
[0140]
根据该实时电压和该实时电流,确定该飞轮储能阵列系统对应的实际有功功率和实际无功功率;
[0141]
根据该实际有功功率,确定目标电压相角;
[0142]
根据该实际无功功率,确定目标电压幅值;
[0143]
根据该目标电压相角和该目标电压幅值,确定该参考电压。
[0144]
可选地,图7是本公开一示例性实施例示出的第二种控制飞轮储能阵列系统的装置的框图,如图7所示,该装置还包括:
[0145]
第一电流获取模块605,用于获取该飞轮储能阵列系统的网侧对应的预设网侧最大电流;
[0146]
第一电流确定模块606,用于根据该预设网侧最大电流,确定该网侧对应的网侧参考电流;
[0147]
第一控制模块607,用于根据该网侧参考电流,控制该网侧的输出电流。
[0148]
可选地,图8是本公开一示例性实施例示出的第三种控制飞轮储能阵列系统的装置的框图,如图8所示,该装置还包括:
[0149]
第二电流获取模块608,用于获取该飞轮储能阵列系统的飞轮单元侧对应的预设飞轮最大电流;
[0150]
第二电流确定模块609,用于根据该预设飞轮最大电流,确定该飞轮单元侧对应的飞轮参考电流;
[0151]
第二控制模块610,用于根据该飞轮参考电流,控制该飞轮单元侧的输出电流。
[0152]
通过上述装置,在飞轮储能阵列系统出现对称故障时,可以通过并网点的实时电压和实时电流确定参考电压,并通过该参考电压调整该飞轮储能阵列系统的网侧的逆变器的输出电压,这样,在飞轮储能阵列系统出现对称故障时可以不脱网运行,从而提高了电网的稳定性。
[0153]
图9是根据一示例性实施例示出的一种控制器900的框图。参照图9,控制器900包括处理器922,其数量可以为一个或多个,以及存储器932,用于存储可由处理器922执行的计算机程序。存储器932中存储的计算机程序可以包括一个或一个以上的每一个对应于一组指令的模块。此外,处理器922可以被配置为执行该计算机程序,以执行上述的控制飞轮储能阵列系统的方法。
[0154]
另外,控制器900还可以包括电源组件926和通信组件950,该电源组件926可以被配置为执行控制器900的电源管理,该通信组件950可以被配置为实现控制器900的通信,例如,有线或无线通信。此外,该控制器900还可以包括输入/输出(i/o)接口958。控制器900可以操作基于存储在存储器932的操作系统,例如windows server
tm
,mac os x
tm
,unix
tm
,linux
tm
等等。
[0155]
在另一示例性实施例中,还提供了一种包括程序指令的计算机可读存储介质,该程序指令被处理器执行时实现上述的控制飞轮储能阵列系统的方法的步骤。例如,该计算机可读存储介质可以为上述包括程序指令的存储器932,上述程序指令可由控制器900的处
理器922执行以完成上述的控制飞轮储能阵列系统的方法。
[0156]
在另一示例性实施例中,还提供一种计算机程序产品,该计算机程序产品包含能够由可编程的装置执行的计算机程序,该计算机程序具有当由该可编程的装置执行时用于执行上述的控制飞轮储能阵列系统的方法的代码部分。
[0157]
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
[0158]
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1