一种三相逆变控制系统和控制方法与流程
1.本发明属于逆变器领域,尤其涉及一种三相逆变控制系统和控制方法。
背景技术:
2.逆变器是把电池、蓄电瓶等直流电能转变成定频定压或调频调压交流电的转换器。随着科技的迅猛发展,人们生活和生产对供电质量的要求也越来越高,而逆变器是不间断电源(ups)、变频电源、新能源供电系统等供电设备的核心部分,因此,对逆变器的研究对现代工业的发展有着重要的意义。现有的逆变控制系统中,由于非线性因素的存在,逆变器的输出波形质量会恶化甚至导致系统不稳定。现有的逆变控制方法中,直接通过电流或电压进行反馈控制,响应速度慢、稳定性差。
技术实现要素:
3.因此,本发明的目的在于克服上述现有技术的缺陷,提供一种三相逆变控制系统,包括瞬时值电压控制器和等效有效值电压控制器,其中,所述瞬时值电压控制器用于反馈控制逆变输出电压的瞬时值,所述等效有效值电压控制器对逆变输出电压的有效值进行正交分解反馈控制,其中,所述等效有效值电压控制器用于对三相逆变器两相旋转坐标系的实轴电压和虚轴电压分别进行积分补偿,所述瞬时值电压控制器和所述等效有效值电压控制器的输出被用于经过延迟环节传递函数和被控对象传递函数获得逆变输出电压。
4.根据本发明的三相逆变控制系统,优选地,所述等效电压有效值控制器为积分补偿器其中,k
comp
为增益系数,s为频域算子。
5.根据本发明的三相逆变控制系统,优选地,所述增益系数小于1。
6.根据本发明的三相逆变控制系统,优选地,所述实轴电压表示为v
r
,所述虚轴电压表示为v
i
,其中,
[0007][0008]
其中,v
ref_sin
表示逆变正弦电压给定值,v
ref_cos
表示逆变余弦电压给定值,v
err
表示逆变正弦电压给定值与逆变器输出电压的差值。
[0009]
根据本发明的三相逆变控制系统,优选地,其中,v
r
为实轴电压平均值,v
i
为虚轴电压平均值,为实轴电压扰动值,为虚轴电压扰动值。
[0010]
根据本发明的三相逆变控制系统,优选地,以及其中,δv
rms
为逆变电压有效值给定与反馈电压有效值的差值,w为逆变输出电压的角频率,t为时间。
[0011]
根据本发明的三相逆变控制系统,优选地,所述积分补偿器将所述实轴电压v
r
变换为控制器实轴输出值v
re
,以及将所述虚轴电压v
i
变换为控制器虚轴输出值v
im
,其中,
[0012][0013]
根据本发明的三相逆变控制系统,优选地,基于控制器实轴输出值v
re
获得等效的实轴电压环输出的占空比d
d
,基于控制器虚轴输出值v
im
获得等效的虚轴电压环输出的占空比d
q
,以及所述瞬时值电压控制器d
v
(s)输出的占空比为d
dv
,总的占空比为d,其中,d=d
dv
+d
d
+d
q
。
[0014]
根据本发明的三相逆变控制系统,优选地,所述总的占空比d被用于经过延迟环节传递函数和被控对象传递函数获得逆变输出电压。
[0015]
根据本发明的三相逆变控制系统,优选地,所述瞬时值电压控制器为滞后控制器,表示为其中k
fw
为瞬时值电压控制器增益系数,z为瞬时电压环控制器零点,p为瞬时电压环控制器极点,s为频域算子。
[0016]
根据本发明的三相逆变控制系统,优选地,还包括坐标系转换部分,用于实现abc坐标系和αβγ坐标系之间的转换。
[0017]
本发明还提供了一种三相逆变控制方法,其包括:
[0018]
反馈控制逆变输出电压的瞬时值的步骤;
[0019]
对逆变输出电压的有效值进行正交分解反馈控制的步骤,其包括对三相逆变器两相旋转坐标系的实轴电压和虚轴电压分别进行积分补偿,以及
[0020]
所述反馈控制逆变输出电压的瞬时值的步骤的输出和所述对逆变输出电压的有效值进行正交分解反馈控制的步骤的输出被用于经过延迟环节传递和被控对象传递获得逆变输出电压。
[0021]
根据本发明的三相逆变控制方法,优选地,所述积分补偿的增益系数小于1。
[0022]
根据本发明的三相逆变控制方法,优选地,所述实轴电压表示为v
r
,所述虚轴电压表示为v
i
,其中,
[0023][0024]
其中,v
ref_sin
表示逆变正弦电压给定值,v
ref_cos
表示逆变余弦电压给定值,v
err
表示逆变正弦电压给定值与逆变器输出电压的差值。
[0025]
根据本发明的三相逆变控制方法,优选地,还包括在反馈过程中将abc坐标系转换为αβγ坐标系,以及在输出过程将αβγ坐标系转换为abc坐标系。
[0026]
根据本发明的三相逆变控制方法,优选地,还包括将逆变器输出电压的初始相角调节为零的步骤。
[0027]
与现有技术相比,本发明的优点在于:等效有效值电压控制环相比传统控制系统,能设计较大的穿越频率,保证足够快调节速度,仍有足够相位幅值裕量。同时系统中的积分控制器保证稳定基本无净差,在动态/稳定性方面有优越的性能。
附图说明
[0028]
以下参照附图对本发明实施例作进一步说明,其中:
[0029]
图1和图2分别示出三相四线逆变拓扑和三相三线逆变拓扑;
[0030]
图3为根据本发明第一实施例的用于三相四线逆变拓扑的简化的逆变控制系统。
[0031]
图4为根据本发明第一实施例的等效逆变控制系统。
[0032]
图5为根据本发明第一实施例的等效有效值电压环的开环波特图。
[0033]
图6示出图4中的瞬时值电压环。
[0034]
图7为图4所示的瞬时值电压环的开环波特图。
[0035]
图8为根据本发明第二实施例的用于三相三线逆变拓扑的简化的逆变控制系统。
[0036]
图9a和9b示出模拟仿真结果。
[0037]
图10a和10b示出硬件在环实验测试结果。
具体实施方式
[0038]
为了使本发明的目的,技术方案及优点更加清楚明白,以下结合附图通过具体实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0039]
参见图1和图2所示的三相四线逆变拓扑和三相三线逆变拓扑。电源电压通过逆变拓扑给负载供电。其中,c
bus
表示单边母线的母线电容;v
bus
表示母线电容电压;brg_a_x/brg_a_y、brg_b_x/brg_b_y、brg_c_x/brg_c_y分别表示a/b/c相的逆变x、y桥臂;l
x
,l
y
分别表示逆变x桥臂、y桥臂的滤波电感;i
l_x
,i
l_y
分别表示逆变x桥臂、y桥臂的滤波电感的电流;c
inv
表示逆变滤波电容;legx,legy分别表示三相逆变器的x桥臂、y桥臂。
[0040]
第一实施例
[0041]
在该实施例,基于图1所示的三相四线逆变拓扑提供本发明的逆变控制系统和逆变控制方法,该实施例的控制系统和控制方法的控制对象是图1所示的三相四线逆变拓扑。为了简单起见,仅以其中的a相为例讨论,本领域技术人员能够理解,b相和c相的情况与a相类似,在本文中,abc和abc都用于表示三相逆变器的三相。
[0042]
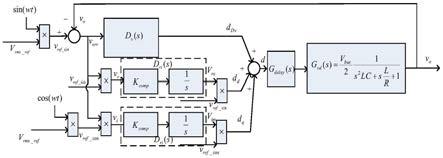
参见图3所示的简化的逆变控制系统。首先,基于逆变电压有效值给定v
rms_ref
获得逆变正弦电压给定值v
ref_sin
和逆变余弦电压给定值v
ref_cos
,
[0043][0044]
其中,w为逆变器输出电压角频率,t为时间。本领域技术人员已知,给定值也称为参考值,即为逆变器输出的期望值。
[0045]
假设
[0046]
其中,v
o
为逆变输出电压(即反馈电压),v
rms_o
为逆变输出电压有效值,θ为逆变电压初始相角,在本发明中,为了控制方便,要求θ=0。
[0047]
那么,
[0048]
v
err
=v
ref_sin
‑
v
o
=v
rms_ref
sin(wt)
‑
v
rms_o
sin(wt)=δv
rms
sin(wt),
[0049]
其中,v
err
为逆变正弦电压给定值与反馈电压的差值,δv
rms
为逆变电压有效值给定与反馈电压有效值的差值。在电路控制领域,反馈电压为正弦值,因此在本发明的讨论中,反馈信号不再标记正弦符号。
[0050]
将包含反馈电压v
o
的v
err
分别与逆变正弦电压给定值和逆变余弦电压给定值输入乘法器获得实轴电压v
r
和虚轴电压v
i
,
[0051][0052]
因此
[0053][0054]
将逆变电压有效值给定归一化为标幺值pu,即v
rms_ref
=1,pu表示相对单位制,是工程领域的常用术语。例如,逆变电压标准值为230v,其用1pu表示,那么(1+15%)*230v即为1.15pu。
[0055]
那么公式(2)可以简化为:
[0056][0057]
进一步将实轴电压和虚轴电压分别表示成包含常数部分(直流量)和扰动部分(交流量):
[0058][0059]
其中,v
r
为实轴电压平均值,v
i
为虚轴电压平均值,为实轴电压扰动值,为虚轴电压扰动值。
[0060]
实轴部分,
[0061]
虚轴部分,
[0062]
根据上述推导,获得三相逆变器两相旋转坐标系的实轴电压和虚轴电压,并将实轴电压和虚轴电压分别写成了包含直流量与交流量的形式。
[0063]
进一步对实轴电压和虚轴电压进行补偿控制,从分解式(3)、(4)和(5)出发,增加积分补偿器(也称积分控制器),其中,在本发明中,d
ri
(s)是用于控制实轴电压和虚轴电压的有效值电压控制器,为了区别传统的有效值电压控制器,在本发明中称为“等效有效值电压控制器”。k
comp
为控制器增益系数,为控制器积分部分,s为频域算子。
[0064]
那么,
[0065]
其中,v
re
为控制器实轴输出值,v
im
为控制器虚轴输出值。
[0066]
将公式(3)代入公式(6),
[0067][0068]
因为,已知
[0069]
所以,将扰动部分忽略不计,得到
[0070][0071]
根据公式(8)可以看出,该实施例中,正交分解之后的逆变器电压有效值包括实部v
re
和虚部v
im
,,而虚部v
im
等于零,其等效于瞬时有效值电压控制系统。由此证明了前述推导过程的正确性和合理性。
[0072]
继续参见图3所示的简化的逆变控制系统。其中,通过瞬时值电压控制器d
v
(s)控制逆变器输出电压瞬时值。d
dv
为瞬时值电压控制器输出的占空比,d
d
为等效的实轴电压环输出的占空比,d
q
为等效的虚轴电压环输出的占空比,g
delay
(s)为数字控制的延迟环节传递函数,g
vd
(s)为电压环的被控对象传递函数,即三相逆变器的硬件拉氏变换得到的数学控制式,v
bus
为母线电容电压,l为逆变滤波电感,c为逆变滤波电容,r为负载等效阻值,被控对象(逆变拓扑)的参数不同,传递函数也不同。总的占空比d经过延迟环节传递函数和被控对象传递函数得到逆变输出电压。
[0073]
在归一化的情况下,
[0074]
基于此,可以进一步得出等效的实轴电压环输出的占空比和等效的虚轴电压环输出的占空比,
[0075][0076]
已知,它表示本发明的等效有效值电压控制器,因为有效值误差δv
rms
可以被快速算出,计算周期为控制周期t
s
,例如这里所以控制器输出v
re
可以很快达到参考值v
rms_ref
,即v
re
≈v
rms_ref
);而传统有效值误差计算周期为市电周期t
o
,如市电50hz/20ms,可见,本发明的等效有效值电压控制器的带宽(即穿越频率f
c_new
)可以被配置为远大于传统的有效值电压控制器的穿越频率f
c_ori
,如本发明的等效有效值电压控制器的穿越频率而传统的有效值电压控制器的穿越频率通常为这意味着本发明的等效有效值电压控制器的调节速度比传统的控制方法的调节速度更快,另外,由于存在积分环节,本发明的控制方法中基本不存在稳态误差。
[0077]
该实施例的整个逆变控制系统等效于电压内外环系统,内环为电压瞬时值开环系统,外环为电压有效值闭环系统。其中瞬时值电压控制器d
v
(s),能保证系统初始状态的收
敛,以及对系统动态有些改善;而电压有效值闭环系统中的虚轴支路能够保证逆变电压初始相角θ为零。系统稳态下δv
rms
≈0,d
d
≈v
rms_ref
sin(wt),d
q
≈0,总的占空比d=d
dv
+d
d
+d
q
≈d
d
即d
dv
≈0,所以瞬时值电压控制器d
v
(s)在稳态下权重占比很小。
[0078]
参见图4所示的等效逆变控制系统,其清楚地示出了电压内外环系统,其中,内环为等效的瞬时值电压开环3,其等效于瞬时值电压环1,而外环为等效的电压有效值闭环2。其中,v
rms_o
为逆变输出电压有效值,e
‑
st
为延迟环节传递函数,g
v_ol
(s)为瞬时值电压环1等效为瞬时值电压开环3的传递函数。
[0079]
下面对照图4具体分析等效的有效值电压环。控制器为控制对象为g
delay
(s)=e
‑
st
,进行帕德(pade)等效线性化,并设计控制器,系统开环和闭环中,
[0080]
等效的电压有效值开环传递函数g
rms_ol
(s)=d
ri
(s)g
delay
(s),
[0081]
等效的电压有效值闭环传递函数
[0082]
设计合适的pm/gm以获得参数k
comp
。其中,pm(phase margin)为相位裕量;gm(gain margin)为幅值裕量。注意,d
ri
必须是积分控制器。
[0083]
参见图5所示的等效有效值电压环的开环波特图,其中,环路穿越频率f
c_ri
=16.6hz,相位裕量pm
ri
=89.6deg,幅值裕量gm
ri
=48.2db,在逆变控制领域,通常要求gm>6,pm>30,可见该实施例的设计能满足性能要求。
[0084]
下面再讨论图4中的瞬时值电压环。为了清楚起见,图6专门示出了图4的瞬时值电压环1。其中,示例性而非限制性地选择其表示滞后控制器,其中k
fw
为瞬时值电压环控制器增益系数,z为瞬时电压环控制器零点,p为瞬时电压环控制器极点,s为频域算子。在本发明中,瞬时值电压环控制器还可以选择本领域公知的其他类型的控制器,只要能够保证系统初始状态的收敛,并且在稳态下占权重较小即可。
[0085]
参见图7所示的瞬时值电压环的开环波特图,其中,穿越频率f
c_v
=15.9hz,相位裕量pm
v
=116deg,增益裕量gm
v
=37.1db,该瞬时值电压环占权重较小,在稳态下约0,故穿越频率可配置为较低。传统的瞬时值电压控制器的穿越频率通常达到100hz以上,本发明的瞬时值电压环的穿越频率明显低于常规标准。
[0086]
第二实施例
[0087]
在该实施例,提供用于图2所示的三相三线逆变拓扑的逆变控制系统,参见图8所示的三相三线逆变器三相控制系统的简化示意图。其在图3所示的控制系统的基础上增加了坐标系转换部分,其中abc/αβγ表示abc坐标系向αβγ坐标系的转换部分,αβλ/abc表示αβγ坐标系向abc坐标系的逆转换部分。在电气领域,三相系统有三相abc静止坐标系,三相αβγ静止坐标系,另外还有两相旋转坐标系dqo,经过坐标系变换后,逆变被控对象的逆变电压v
inv_α
v
inv_β
依然为正余弦基波控制,其控制器依然采用瞬时值电压控制器d
v
(s)和等效有效值电压控制器d
ri
(s);逆变电压v
inv_γ
即为3次谐波控制,通过注入3次谐波用于提高直流
电压利用率
[0088]
发明人分别通过模拟仿真和硬件在环(hil)实验测试的结果来证明本发明效果。
[0089]
参见图9a和9b所示的模拟仿真结果。图9a从上到下依次为满载稳态情况下,逆变abc相电压v
inv_abc
、逆变桥臂x及y的abc相电感电流i
inv_abc_xy
、输出abc相电流i
o_abc
,各信号正常且基本无净差。图9b为满载稳态情况下逆变电压a相的谐波数据,其中,电压谐波总畸变率thdv=0.88%,符合产品稳态性能要求,本领域技术人员能够理解,对于b相和c相会有类似的谐波数据。
[0090]
参见图10a和10b所示的hil实验测试结果。图10a显示负载由0%
‑
>100%瞬态过程,逆变abc相电压v
inv_abc
、逆变桥臂x的a相电感电流i
inv_a_x
,在投载过程,信号稳定,动态周期约小于1个市电周期20ms。图10b显示负载由100%
‑
>0%的卸载过程,结果显示逆变电压及电流均稳定,动态过程小于市电周期。可见,逆变器在负载动态下稳定,动态性能及稳态净差满足要求。
[0091]
总地来说,本发明提供了一种新型的逆变电压正交分解法,包括获得实轴电压及虚轴电压,以及通过小信号分析法,分解实轴电压直流量及扰动量,同理得虚轴直流量及扰动量。基于新型电压正交分解法,设计一套新型的逆变电压控制器,包括等效有效值电压控制器和瞬时值电压控制器。在三相逆变器上,设计一个完整的新型三相逆变控制系统,相比传统逆变控制系统,在有效值电压控制上,该新型系统在动态及稳态性上比传统的好很多。且在瞬时值电压控制环相当于开环系统,能保证应用于逆变并机系统,性能不差于传统的。
[0092]
本发明的逆变器控制系统的效果之一是该等效有效值电压控制环,相比传统控制系统,能设计较大的穿越频率,保证足够快调节速度,仍有足够相位幅值裕量。同时系统中的积分控制器部分保证稳定基本无净差,在动态/稳定性方面有优越的性能。
[0093]
虽然本发明已经通过优选实施例进行了描述,然而本发明并非局限于这里所描述的实施例,在不脱离本发明范围的情况下还包括所作出的各种改变以及变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1