一种永磁同步电机的解耦线性自抗扰控制方法
1.本发明涉及永磁同步电机伺服控制领域的一种电机控制方法,特别是涉及了一种永磁同步电机的解耦线性自抗扰控制方法。
背景技术:
2.永磁同步电机凭借其结构紧凑,功率密度高,动态性能好等优势,已被广泛应用于机器人,高端数控机床,医疗设备等高端工业领域。但是,永磁同步电机复杂的非线性动态特性和各种扰动源增加了永磁同步电机实现高精度控制的难度。
3.永磁同步电机控制中存在的扰动分为周期性扰动和非周期性扰动。周期性扰动主要包含由逆变器死区时间效应,永磁体磁链谐波和电流传感器采样误差产生的周期性扰动。非周期性扰动主要包含由于电机参数变化,系统模型失配和负载转矩等产生的扰动。
4.近年来,线性自抗扰控制由于具有强大的抗扰能力和不依赖模型的特点已被成功应用于永磁同步电机控制。但由于传统线性自抗扰控制器中的扩张状态观测器对于扰动的观测带宽有限,传统线性自抗扰控制器只能有效地抑制永磁同步电机控制中的非周期性扰动,不能有效地抑制周期性扰动。但是,这些周期性扰动会使得电机的电流、转速产生明显波动,恶化电机电流、转速的控制性能。此外,传统线性自抗扰控制器不是两自由度控制器,其控制系统的跟踪性能与抗扰性能存在耦合关系,这会使得控制器的参数不容易整定。
技术实现要素:
5.为了使线性自抗扰控制器变为两自由度控制器,减小控制器参数整定的难度,本发明提出了一种解耦线性自抗扰控制器,该解耦线性自抗扰控制器为两自由度控制器,其控制系统的跟踪性能与抗扰性能可以实现完全解耦。
6.同时,为了使解耦线性自抗扰控制器能有效地抑制永磁同步电机控制中的周期性扰动,增强电机电流和转速的控制性能,本发明构建设计了解耦线性自抗扰控制器,分为电流和转速部分。
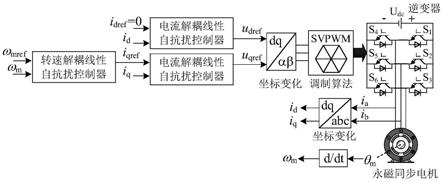
7.为实现上述目标,如图1和图2所示,本发明具体采用以下技术方案:
8.1)建立永磁同步电机的电流环和转速环模型:
[0009][0010]
其中,p为磁极对数;l
n
为永磁同步电机中的电感出厂标称值;j
n
为系统转动惯量出厂标称值;ψ
rn
为永磁同步电机中的永磁体磁链出厂标称值;i
d
和i
q
分别为d轴和q轴实际电流;i
qref
为永磁同步电机所连接的转速控制器输出q轴参考电流;u
dref
和u
qref
分别为永磁同步电机所连接的d轴和q轴电流控制器输出参考电压;d
d
和d
q
分别为d轴和q轴电流环中的集总扰动;d
ω
为转速环中的集总扰动;a
d
、a
q
和a
ω
分别为集总扰动d
d
、d
q
和d
ω
的变化率;t表示时间;
[0011]
电流环包括电流控制器和被控对象。
[0012]
所述的系统包括永磁同步电机、负载以及永磁同步电机和负载之间的连接件。负载例如为负载电机,永磁同步电机和负载之间的连接件例如为联轴器。
[0013]
根据电流环和转速环模型可见,永磁同步电机d轴电流环、q轴电流环和转速环具有相同的模型结构,将电流环和转速环模型中的d轴电流环、q轴电流环和转速环均等效为一阶系统模型,统一表示成:
[0014][0015]
其中,x1代表i
d
、i
q
和ω
m
其中之一;x2代表d
d
、d
q
和d
ω
其中之一;b代表1/l
n
和1.5pψ
rn
/j
n
其中之一;u代表u
dref
、u
qref
和i
qref
其中之一;a代表a
d
、a
q
和a
ω
其中之一;
[0016]
2)根据一阶系统模型建立解耦线性自抗扰控制器:
[0017]
根据d轴电流环、q轴电流环和转速环的一阶系统模型分别建立各自的解耦线性自抗扰控制器,分别为d轴电流解耦线性自抗扰控制器、q轴电流解耦线性自抗扰控制器、转速解耦线性自抗扰控制器,d轴电流解耦线性自抗扰控制器、q轴电流解耦线性自抗扰控制器、转速解耦线性自抗扰控制器均包含线性跟踪微分器、线性扩张状态观测器和线性控制律的三个部分;
[0018]
如图2所示,线性跟踪微分器接收预设给定参考指令v处理获得线性跟踪微分参考指令v
ltd
并输入到线性控制律中,线性控制律接收线性跟踪微分参考指令v
ltd
以及待观测量的观测值和集总扰动处理获得输出参考量并输入到一阶系统模型中,一阶系统模型接收输
出参考量处理获得待观测量的实际值并输入到线性扩张状态观测器,线性扩张状态观测器根据待观测量的实际值处理获得待观测量的观测值和集总扰动输入到线性控制律中,从而实现闭环反馈的自抗扰控制;
[0019]
3)由d轴电流解耦线性自抗扰控制器、q轴电流解耦线性自抗扰控制器、转速解耦线性自抗扰控制器共同工作对永磁同步电机解耦线性自抗扰控制。
[0020]
所述的集总扰动d
d
、d
q
和d
ω
的表达式如下所示:
[0021][0022]
其中,l
s
为定子电感,δl
s
为定子电感偏差值,l
s
=l
n
+δl
s
;r
s
为定子电阻;ψ
r
为永磁体磁链,δψ
r
为永磁体磁链偏差值,ψ
r
=ψ
rn
+δψ
r
;ω
m
为转子机械转速;j为系统转动惯量,δj为系统转动惯量偏差值,j=j
n
+δj;t
l
为负载转矩;t
f
为摩擦转矩;γ
id
和γ
iq
分别为d轴和q轴电流环中存在的周期性扰动;γ
ω
为转速环中存在的周期性扰动。
[0023]
所述2)中,跟踪模块g
c
均设计成比例结构,表示为:
[0024]
g
c
=k
p
[0025]
其中,k
p
为比例系数;
[0026]
q轴电流、d轴电流和转速对应的解耦线性自抗扰控制器中的跟踪模块g
c
均统一设置为比例结构。
[0027]
所述2)中,q轴电流、d轴电流和转速对应的解耦线性自抗扰控制器中的抗扰模块g
o
均设置为比例
‑
微分
‑
谐振结构,但q轴电流、d轴电流和转速对应的解耦线性自抗扰控制器中的抗扰模块进行区分设置;
[0028]
q轴电流解耦线性自抗扰控制器和d轴电流解耦线性自抗扰控制器中的抗扰模块表达式为:
[0029][0030]
其中,g
oc
(s)表示在复频域中电流解耦线性自抗扰控制器的抗扰模块;s表示复频域的频率参数;h
1c
和h
2c
分别表示电流解耦线性自抗扰控制器抗扰模块中的比例系数和积分系数;k
r6
和分别表示电流解耦线性自抗扰控制器抗扰模块中谐振频率为6pω
m
谐振项的比例系数和相位调整角;
[0031]
转速解耦线性自抗扰控制器中的抗扰模块表达式为:
[0032][0033]
其中,g
os
(s)表示在复频域中转速解耦线性自抗扰控制器的抗扰模块;h
1s
和h
2s
分别表示转速解耦线性自抗扰控制器抗扰模块中的比例系数和积分系数;k
r1
和分别表示转速解耦线性自抗扰控制器抗扰模块中谐振频率为pω
m
谐振项的比例系数和相位调整角;
k
r2
和分别表示转速解耦线性自抗扰控制器抗扰模块中谐振频率为2pω
m
谐振项的比例系数和相位调整角。
[0034]
电流环和转速环两者的抗扰模块g
o
进行区分处理,以适应永磁同步电机电流环主要存在频率为6pω
m
的周期性扰动、转速环主要存在频率为pω
m
和2pω
m
的周期性扰动的情况。
[0035]
所述3)中:
[0036]
线性跟踪微分器的表达式为:
[0037][0038]
其中,v表示预设给定参考指令,v
ltd
表示线性跟踪微分参考指令,r表示线性跟踪微分参考指令v
ltd
收敛到预设给定参考指令v的速度调节因子;
[0039]
线性扩张状态观测器的表达式:
[0040][0041]
其中,和分别为x1和x2的观测值;g
o
表示抗扰模块,决定了系统的抗扰性能,根据系统具体抗扰指标要求,g
o
可以被设计成任何结构;
[0042]
线性控制律的表达式:
[0043][0044]
其中,g
c
表示跟踪模块,决定了系统对于线性跟踪微分参考指令v
ltd
的跟踪性能。根据系统具体跟踪性能指标要求,g
o
可以被设计成任何结构。
[0045]
如图1所示,系统闭环传递函数的表达式:
[0046][0047]
其中,g
t
(s)表示系统的跟踪性能;g
d
(s)表示系统的抗扰性能;g
c
(s)为g
c
在复频域中表现形式;g
o
(s)为g
o
在复频域中表现形式。
[0048]
本发明对d轴电流环、q轴电流环和转速环均分别建立统一有效的解耦线性自抗扰控制器,为两自由度控制器,能够有效地抑制这些频率的周期性扰动。
[0049]
所述3)具体为:
[0050]
3.1)通过微控制器设定永磁同步电机的转子机械参考转速ω
mref
和负载转矩,对永磁同步电机的d轴参考电流i
dref
设置为i
dref
=0进行控制;
[0051]
3.2)通过安装在永磁同步电机上的位置编码器获得电机的转子位置电角度和转子机械实际转速ω
m
,通过安装在永磁同步电机上的电流传感器获得永磁同步电机a相电流i
a
和b相电流i
b
,已知i
a
和i
b
,根据i
c
=
‑
(i
a
+i
b
)的关系可以根据a相电流i
a
和b相电流i
b
得到c相电流i
c
,将a相电流i
a
、b相电流i
b
、c相电流i
c
通过帕克坐标变化获得d轴实际电流i
d
和q轴实际电流i
q
;
[0052]
3.3)将d轴实际电流i
d
输入到d轴电流解耦线性自抗扰控制器的线性扩张状态观测器中得到d轴实际电流观测值和d轴电流环中的扰动观测值将q轴实际电流i
q
输入到q轴电流解耦线性自抗扰控制器的线性扩张状态观测器中得到q轴实际电流观测值和q轴电流环中的扰动观测值将转子机械实际转速ω
m
输入到转速解耦线性自抗扰控制器的线性扩张状态观测器中得到转子机械实际转速观测值和转速环中的扰动观测值
[0053]
3.4)将转子机械参考转速ω
mref
输入到转速解耦线性自抗扰控制器的线性跟踪微分器中得到线性跟踪微分转子机械参考转速ω
mrefltd
,将线性跟踪微分转子机械参考转速ω
mrefltd
与转子机械实际转速观测值之间的差值和转速环中的扰动观测值输入到转速解耦线性自抗扰控制器的线性控制律中得到q轴参考电流i
qref
;
[0054]
3.5)将d轴参考电流i
dref
输入到d轴电流解耦线性自抗扰控制器的线性跟踪微分器中得到d轴线性跟踪微分参考电流i
drefltd
,将d轴线性跟踪微分参考电流i
drefltd
与d轴实际电流观测值的差值和d轴电流环中的扰动观测值输入到d轴电流解耦线性自抗扰控制器的线性控制律中得到d轴参考电压u
dref
;
[0055]
将q轴参考电流i
qref
输入到q轴电流解耦线性自抗扰控制器的线性跟踪微分器中得到q轴线性跟踪微分参考电流i
qrefltd
,将q轴线性跟踪微分参考电流i
qrefltd
与q轴实际电流观测值的差值和q轴电流环中的扰动观测值输入到q轴电流解耦线性自抗扰控制器的线性控制律中得到q轴参考电压u
qref
;
[0056]
3.6)将d轴参考电压u
dref
和q轴参考电压u
qref
通过反帕克坐标变化后送入空间矢量脉宽调制算法svpwm中,生成逆变器的六路开关信号,逆变器连接在永磁同步电机的输入控制端,驱动永磁同步电机正常工作。
[0057]
本发明的有益效果是:
[0058]
(1)解耦线性自抗扰控制器能够保证一阶系统的跟踪性能和抗扰性能完全解耦,大大减少控制器参数整定的难度。
[0059]
(2)本发明根据解耦线性自抗扰控制器构建的电流解耦线性自抗扰控制器和转速解耦线性自抗扰控制器能够有效地抑制永磁同步电机电流环和速度环中的周期性扰动,增强电机电流和转速的控制性能,极大地提高了电流和转速的控制精度。
附图说明
[0060]
图1为实现本发明的永磁同步电机整体控制框图;
[0061]
图2为实现本发明的一阶系统模型解耦线性自抗扰控制器的原理图;
[0062]
图3a为永磁同步电机d轴和q轴电流实验结果图;
[0063]
图3b为永磁同步电机转速实验结果图。
具体实施方式
[0064]
下面结合附图和具体实施例对本发明作进一步阐述。
[0065]
如图1所示,按照本发明发明内容的技术方案完整实施的应用实施例如下:
[0066]
1)通过微控制器设定永磁同步电机的转子机械参考转速ω
mref
和负载转矩,对永磁同步电机采用i
dref
=0控制,其中i
dref
为d轴参考电流。
[0067]
2)通过安装在永磁同步电机上的位置编码器获得电机的转子位置电角度和转子机械实际转速ω
m
。通过电流传感器获得永磁同步电机a相电流i
a
和b相电流i
b
,已知i
a
和i
b
,根据i
c
=
‑
(i
a
+i
b
)的关系可以得到c相电流i
c
,将i
a
,i
b
和i
c
通过帕克坐标变化获得d轴实际电流i
d
和q轴实际电流i
q
。
[0068]
3)将d轴实际电流i
d
输入到d轴电流解耦线性自抗扰控制器的线性扩张状态观测器中,得到d轴实际电流观测值和d轴电流环中的扰动观测值将q轴实际电流i
q
输入到q轴电流解耦线性自抗扰控制器的线性扩张状态观测器中,得到q轴实际电流观测值和q轴电流环中的扰动观测值将转子机械实际转速ω
m
输入到转速解耦线性自抗扰控制器的线性扩张状态观测器中,得到转子机械实际转速观测值和转速环中的扰动观测值
[0069]
4)将转子机械参考转速ω
mref
输入到转速解耦线性自抗扰控制器的线性跟踪微分器中,得到线性跟踪微分转子机械参考转速ω
mrefltd
,将线性跟踪微分转子机械参考转速ω
mrefltd
与转子机械实际转速观测值的差值和转速环中的扰动观测值输入到转速解耦线性自抗扰控制器的线性控制律中得到q轴参考电流i
qref
。
[0070]
5)将d轴参考电流i
dref
输入到d轴电流解耦线性自抗扰控制器的线性跟踪微分器中,得到d轴线性跟踪微分参考电流i
drefltd
,将d轴线性跟踪微分参考电流i
drefltd
与d轴实际电流观测值的差值和d轴电流环中的扰动观测值输入到d轴电流解耦线性自抗扰控制器的线性控制律中得到d轴参考电压u
dref
。
[0071]
将q轴参考电流i
qref
输入到q轴电流解耦线性自抗扰控制器的线性跟踪微分器中得到q轴线性跟踪微分参考电流i
qrefltd
,将q轴线性跟踪微分参考电流i
qrefltd
与q轴实际电流观测值的差值和q轴电流环中的扰动观测值输入到q轴电流解耦线性自抗扰控制器的线性控制律中得到q轴参考电压u
qref
。
[0072]
6)将d轴参考电压u
dref
和q轴参考电压u
qref
通过反帕克坐标变化后送入空间矢量脉宽调制算法svpwm中,生成逆变器的六路开关信号,逆变器连接在电机的输入控制端,驱动电机正常工作。
[0073]
7)实验验证
[0074]
为验证本发明所提控制方法的有效性和优越性,进行实验验证:
[0075]
7.1)实验内容
[0076]
将永磁同步电机d轴参考电流设置为0a,转子机械参考转速设置为900r/min,负载转矩在第1s时刻由0nm阶跃至10nm等效于q轴实际电流在第1s时刻由0a阶跃至5.82a。通过观察对比永磁同步电机分别在传统线性自抗扰控制器d轴电流传统线性自抗扰控制器,q轴电流传统线性自抗扰控制器,转速传统线性自抗扰控制器和解耦线性自抗扰控制器d轴电流解耦线性自抗扰控制器,q轴电流解耦线性自抗扰控制器,转速解耦线性自抗扰控制器控
制下的d轴实际电流,q轴实际电流和实际转速的稳态波动幅值,验证本发明中永磁同步电机解耦线性自抗扰控制方法的控制效果。
[0077]
7.2)实验结果
[0078]
图3a为本发明所提出的控制方法下永磁同步电机d轴实际电流和q轴实际电流的响应与在传统线性自抗扰控制方法下的对比图。图3b为本发明所提出的控制方法下永磁同步电机在带10nm负载转矩工况下实际转速的稳态响应与在传统线性自抗扰控制方法下的对比图。
[0079]
由实验图可知,相比与传统线性自抗扰控制器,用解耦线性自抗扰控制器构建的d轴电流解耦线性自抗扰控制器,q轴电流解耦线性自抗扰控制器,转速解耦线性自抗扰控制器能够有效地抑制永磁同步电机电流环和速度环中的周期性扰动,增强电机电流和转速的控制性能,极大地提高了电流和转速的控制精度。
[0080]
以上所述仅为本发明的典型实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1