具有非对称式靴部的磁悬浮轴承的制作方法
1.本发明涉及一种轴承,尤其涉及一种具有非对称式靴部的磁悬浮轴承。
背景技术:
2.由于磁悬浮轴承具有高转速、无摩擦损耗与可控制等优于传统轴承的优势,因此,磁悬浮轴承逐渐被广泛地应用于需要高精密或是高转速的设备仪器。
3.请参阅图1,图1显示现有技术的磁悬浮轴承的示意图。如图所示,一种磁悬浮轴承pa1包含一转子结构pa11与一定子结构pa12。转子结构pa11包含一转轴pa111与一转子本体pa112。定子结构pa12包含一定子本体pa121、多个凸极pa122、pa122a、pa122b、pa122c、pa122d与线圈pa123。需说明的是,附图凸极pa122、pa122a、pa122b、pa122c与pa122d,以下说明书内容中,凸极pa122a、pa122b、pa122c与pa122d是在需要详细说明的时候使用;凸极pa122则是表示一个统称。
4.转子本体pa112套设于转轴pa111上。定子结构pa12与转子结构pa11相间。凸极pa122自定子本体pa121向转子本体pa112凸伸出。线圈pa123则是缠绕于凸极pa122。利用电流通过线圈pa123使得凸极pa122产生磁力,以将转子结构pa11控制在定子结构pa12的中间位置,而处于一稳定状态。
5.更详细的说明,凸极pa122a产生一第一磁力pam1,凸极pa122b产生一第二磁力pam2。第一磁力pam1的方向会沿着凸极pa122a的中心轴,第二磁力pam2的方向会沿着凸极pa122b的中心轴。上述方向也可以等同于是磁力线流向、磁通流向。第一磁力pam1与第二磁力pam2会影响磁悬浮轴承pa1的控制方向,也就是铅直方向。同理,凸极pa122c与凸极pa122d亦相同,并会影响磁悬浮轴承pa1的另一控制方向,也就是水平方向。
6.虽然线圈pa123缠绕于凸极pa122后,会通过凡立水与胶固定,但是仍存在着线圈pa123自凸极pa122松脱的风险。此外,凸极pa122与线圈pa123所产生的磁力,在其控制方向(水平与铅直方向)上的分力以及效能仍有提升的空间。因此,现有技术存在改善的空间。
技术实现要素:
7.有鉴于在现有技术中,线圈可能自凸极松脱的问题,以及磁力在控制方向上的分力以及效能存在提升的空间。本发明的一主要目的提供一种具有非对称式靴部的磁悬浮轴承,用以解决现有技术中的至少一个问题。
8.本发明为解决现有技术的问题,所采用的必要技术手段为提供一种具有非对称式靴部的磁悬浮轴承包含一转子结构与一定子结构。定子结构套设于转子结构,与转子结构相间,并包含一定子本体、多个凸极组、至少一第一线圈组与至少一第二线圈组。每一凸极组包含一第一凸极与一第二凸极。第一凸极自定子本体向转子结构凸伸出,具有一第一侧与一第二侧,并仅具有一第一靴部,且第一靴部位于第二侧。第二凸极自定子本体向转子结构凸伸出,具有一第三侧与一第四侧,并仅具有一第二靴部,且第二靴部位于邻近于第二侧的第三侧。第一线圈组缠绕于凸极组的第一凸极。第二线圈组缠绕于凸极组的第二凸极。
9.其中,当第一线圈组与第二线圈组受操作而产生多条磁力线时,磁力线流经第一靴部与第二靴部,藉以使磁力线在第一凸极所产生的第一磁力自第一凸极的一第一中心轴偏向第一靴部,使磁力线在第二凸极所产生的第二磁力自第二凸极的一第二中心轴偏向第二靴部。
10.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使具有非对称式靴部的磁悬浮轴承中的第一靴部,具有一第一外展面,第一凸极在第二侧具有一第一端面,第一外展面与第一端面形成有一第一角度,其中,第一角度介于15度至45度。
11.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使具有非对称式靴部的磁悬浮轴承中的第一靴部的截面,呈一直角三角形。
12.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使具有非对称式靴部的磁悬浮轴承中的第二靴部,具有一第二外展面,第二凸极在第三侧具有一第二端面,第二外展面与第二端面形成有一第二角度,其中,第二角度介于15度至45度。
13.在上述必要技术手段的基础下,本发明所衍生的一附属技术手段为使具有非对称式靴部的磁悬浮轴承中的第二靴部的截面,呈一直角三角形。
14.承上所述,本发明较佳实施例所提供的具有非对称式靴部的磁悬浮轴承,利用第一靴部与第二靴部,相较于现有技术,本发明可以将产生得磁力更集中于控制方向、增加控制方向上的分力,进而提升效能。此外,第一靴部与第二靴部也可以达到辅助抵顶第一线圈组与第二线圈组的功效,进而避免第一线圈组与第二线圈组自定子结构松脱。
附图说明
15.图1显示现有技术的磁悬浮轴承的示意图;
16.图2显示本发明较佳实施例所提供的具有非对称式靴部的磁悬浮轴承的示意图;
17.图3显示本发明较佳实施例所提供的具有非对称式靴部的磁悬浮轴承产生的磁力的示意图;以及
18.图4显示本发明较佳实施例所提供的具有非对称式靴部的磁悬浮轴承的靴部设定方法的流程图。
19.附图标号说明:
20.pa1:磁悬浮轴承
21.pa11:转子结构
22.pa111:转轴
23.pa112:转子本体
24.pa12:定子结构
25.pa121:定子本体
26.pa122,pa122a,pa122b,pa122c,pa122d:凸极
27.pa123:线圈
28.pam1:第一磁力
29.pam2:第二磁力
30.1:具有非对称式靴部的磁悬浮轴承
31.11:转子结构
32.111:转轴
33.112:转子本体
34.12:定子结构
35.121:定子本体
36.122:凸极组
37.1221a,1221b:第一凸极
38.1222a,1222b:第二凸极
39.123:第一线圈组
40.124:第二线圈组
41.a1:第一外展面
42.a2:第一端面
43.a3:第一底面
44.a4:第二外展面
45.a5:第二端面
46.a6:第二底面
47.d1:第一控制方向
48.d2:第二控制方向
49.e1a,e1b:第一侧
50.e2a,e2b:第二侧
51.e3a,e3b:第三侧
52.e4a,e4b:第四侧
53.m1,m3:第一磁力
54.m2,m4:第二磁力
55.s1a,s1b:第一靴部
56.s2a,s2b:第二靴部
57.x1a,x1b:第一中心轴
58.x2a,x2b:第二中心轴
具体实施方式
59.下面将结合示意图对本发明的具体实施方式进行更详细的描述。根据下列描述和申请专利范围,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
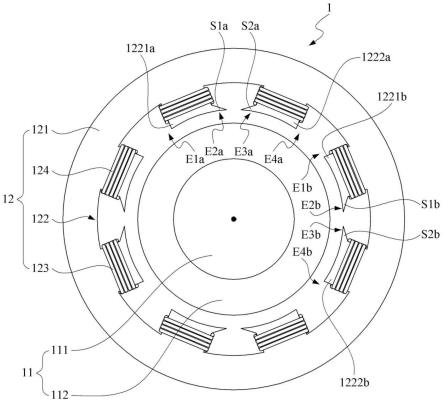
60.请参阅图2与图3,其中,图2显示本发明较佳实施例所提供的具有非对称式靴部的磁悬浮轴承的示意图;以及,图3显示本发明较佳实施例所提供的具有非对称式靴部的磁悬浮轴承产生的磁力的示意图。如图所示,一种具有非对称式靴部的磁悬浮轴承1包含一转子结构11与一定子结构12。在本实施例中,具有非对称式靴部的磁悬浮轴承1是一异极式八极径向磁浮轴承。
61.转子结构11包含一转轴111与一转子本体112。转子本体112套设于转轴111。转子结构11与现有技术中的转子结构pa11相同,故不多加赘述。
62.定子结构12套设于转子结构11,并且与转子结构11相间。定子结构12包含一定子本体121、多个凸极组122(附图绘制四组并标示一组示意)、至少一第一线圈组123与至少一第二线圈组124。定子本体121通常是磁性材质。
63.每个凸极组122自定子结构12向转子结构11凸伸出,并包含一第一凸极与一第二凸极。附图标示第一凸极1221a、1221b与第二凸极1222a、1222b示意。
64.第一线圈组123缠绕于凸极组122的第一凸极,如附图中的第一凸极1221a、1221b。第二线圈组124则是缠绕于凸极组122的第二凸极,如附图中的第二凸极1222a、1222b。需说明的是,第一线圈组123可以是一组,也可以是多组。同理,第二线圈组124亦相同。
65.举例说明,第一凸极1221a具有一第一侧e1a与一第二侧e2a,并仅具有一第一靴部s1a。第一靴部s1a位于第一凸极1221a的第二侧e2a。需说明的是,第一凸极1221a只具有一个靴部,也就是位于第二侧e2a的第一靴部s1a,而第一凸极1221a在第一侧e1a并不具有任何靴部。在图2的视角中,第一靴部s1a的截面呈一直角三角形。
66.第二凸极1222a具有一第三侧e3a与一第四侧e4a,并仅具有一第二靴部s2a。第二靴部s2a位于第二凸极1222a的第三侧e3a,且第三侧e3a是邻近于第一凸极1221a的第二侧e2a。需说明的是,第二凸极1222a只具有一个靴部,也就是位于第三侧e3a的第二靴部s2a,而第二凸极1222a在第四侧e4a并不具有任何靴部。在图2的视角中,第二靴部s2a的截面呈一直角三角形。因此,本发明所提及的“非对称式靴部”,是指单一凸极中,仅会有一侧具有靴部。
67.第一靴部s1a与第二靴部s2a可以达到辅助抵顶第一线圈组123与第二线圈组124的功效,藉以避免第一线圈组123与第二线圈组124自第一凸极1221a与第二凸极1222a松脱。
68.当第一线圈组123与第二线圈组124受操作而产生多条磁力线时,磁力线会流经第一靴部s1a与第二靴部s2a,并在第一凸极1221a产生一第一磁力m1,在第二凸极1222a产生一第二磁力m2。
69.更详细的说明,因为第一靴部s1a的磁阻较小,因此,第一磁力m1会自第一凸极1221a的一第一中心轴x1a偏向第一靴部s1a。同理,因为第二靴部s2a的磁阻较小,因此,第二磁力m2会自第二凸极1222a的一第二中心轴x2a偏向第二靴部s2a。
70.当第一磁力m1偏向第一靴部s1a且第二磁力m2偏向第二靴部s2a时,第一磁力m1与第二磁力m2在一第一控制方向d1上的分力,相较于现有技术就会增加,进而提升效能。在本实施例中,第一控制方向d1即为二维坐标的y轴方向。上述磁力的方向也可以等同于磁力线流向、磁通流向。
71.另一方面,在另一凸极组122中,第一凸极1221b与第二凸极1222b的结构和第一凸极1221a与第二凸极1222a的结构相同,因此,第一凸极1221b与第二凸极1222b中的第一侧e1b、第二侧e2b、第一靴部s1b、第三侧e3b、第四侧e4b、第二靴部s2b、第一中心轴x1b与第二中心轴x2b的结构关系将不再多做描述。
72.需说明的是,因为定子结构12本身为圆弧状结构,因此,第一凸极1221b与第二凸极1222b所产生的磁力则会影响一第二控制方向d2,其中,第二控制方向d2垂直第一控制方向d1。
73.磁力线会流经第一靴部s1b与第二靴部s2b,并在第一凸极1221b产生一第一磁力
m3,在第二凸极1222b产生一第二磁力m4。
74.更详细的说明,因为第一靴部s1b的磁阻较小,因此,第一磁力m3会自第一凸极1221b的第一中心轴x1b偏向第一靴部s1b。同理,因为第二靴部s2b的磁阻较小,因此,第二磁力m4会自第二凸极1222b的第二中心轴x2b偏向第二靴部s2b。
75.当第一磁力m3偏向第一靴部s1b且第二磁力m4偏向第二靴部s2b时,第一磁力m3与第二磁力m4在第二控制方向d2上的分力,相较于现有技术就会增加,进而提升效能。在本实施例中,第二控制方向d2即为二维坐标的x轴方向。
76.因此,本发明的具有非对称式靴部的磁悬浮轴承1相较于现有技术,可以将产生得磁力更集中于控制方向、增加控制方向上的分力,进而提升效能。此外,第一靴部s1a、s1b与第二靴部s2a、s2b也可以达到辅助抵顶第一线圈组123与第二线圈组124的功效,进而避免第一线圈组123与第二线圈组124自定子结构12松脱。
77.最后,请参阅图2至图4,图4显示本发明较佳实施例所提供的具有非对称式靴部的磁悬浮轴承的靴部设定方法的流程图。如图所示,一种具有非对称式靴部的磁悬浮轴承的靴部设定方法,包含以下步骤s101至步骤s106。
78.步骤s101:在第一凸极的第二侧设定第一靴部的第一外展面的第一外展长度。
79.如图2与图3所示,在第一凸极1221a的第二侧e2a的一第一端面a2上,设定第一靴部s1a的一第一外展面a1的第一外展长度。
80.步骤s102:设定第一外展面与第二侧的第一角度。
81.如图3所示,设定第一外展面a1与第一端面a2之间的第一角度。一般来说,第一角度会介于15度至45度之间。
82.步骤s103:利用第一外展长度与第一角度决定第一靴部的第一底面的第一底部长度。
83.利用第一外展长度与第一角度计算出第一靴部s1a的一第一底面a3的第一底部长度。实务上,可以利用三角函数或是毕氏定理计算出第一底部长度。
84.步骤s104:在第二凸极的第三侧设定第二靴部的第二外展面的第二外展长度。
85.如图2与图3所示,在第二凸极1222a的第三侧e3a的一第二端面a5上,设定第二靴部s2a的一第二外展面a4的第二外展长度。
86.步骤s105:设定第二外展面与第三侧的第二角度。
87.如图3所示,设定第二外展面a4与第二端面a5之间的第二角度。一般来说,第二角度也会介于15度至45度之间。
88.步骤s106:利用第二外展长度与第二角度决定第二靴部的第二底面的第二底部长度。
89.利用第二外展长度与第二角度计算出第二靴部s2a的一第二底面a6的第二底部长度。实务上,可以利用三角函数或是毕氏定理计算出第二底部长度。
90.因此,可以快速有效率地设计出本发明较佳实施例所提供的具有非对称式靴部的磁悬浮轴承1的第一靴部s1a与第二靴部s2a。
91.综上所述,本发明较佳实施例所提供的具有非对称式靴部的磁悬浮轴承,利用第一靴部与第二靴部,相较于现有技术,本发明可以将产生得磁力更集中于控制方向、增加控制方向上的分力,进而提升效能。此外,第一靴部与第二靴部也可以达到辅助抵顶第一线圈
组与第二线圈组的功效,进而避免第一线圈组与第二线圈组自定子结构松脱。
92.通过以上较佳具体实施例的详述,希望能更加清楚描述本发明的特征与精神,而并非以上述所揭示的较佳具体实施例来对本发明的范畴加以限制。相反地,其目的是希望能涵盖各种改变及具相等性的安排于本发明所欲申请的权利要求的范畴内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1