速度传感器感应电机矢量控制调速系统
1.本发明属于电力电子与电力传动领域,尤其适用于对感应电机的矢量调速控制,其结合感应电机的速度传感器对其转速进行取样反馈,通过反馈控制实现感应电机负载的高精度控制调速过程。
背景技术:
2.感应电机由于结构简单,运行稳定而在生活中应用广泛,但是针对负载多变或者转速稳定性要求高的场合存在其调节能力差的缺陷。随着电力电子技术的发展及信息技术的推进,不同的电力电子技术结合控制方法使得电机的调速控制方法推进快速,感应电机的精确控制也得到了迅猛发展。本发明专利通过引入基于感应电机速度传感器矢量控制调速系统,结合闭环反馈控制策略,得到感应电机速度传感器形式的高精度控制效果。
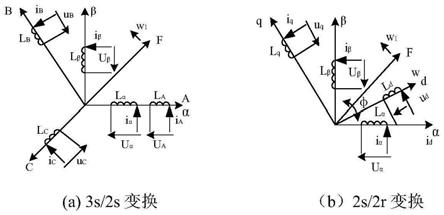
3.如图1所示为矢量坐标变换基础图示,图1(a)为通过将三相静止坐标变换到两相静止坐标图示,其作用为通过将感应电机三相定子电流转换为静止两相坐标变量,然后在通过图1(b)中的两相静止坐标变量变换到两相旋转坐标变量,以与感应电机转子三相电流进行变换对应,实现整个矢量控制变换的基本过程。
4.由图可得i
α
,i
β
与id,iq的关系为:
[0005][0006]
式中i
α
,i
β
为静止坐标下的两相定子电流值,id,iq为旋转坐标下的两相定子电流值。整理可得,两相静止坐标系到两相旋转坐标系的变换矩阵式为:
[0007][0008][0009]
式中c
2s/2r
为坐标变换矩阵。
[0010]
两相旋转坐标系到两相静止坐标系的变换矩阵为:
[0011][0012]
图2所示为基于速度传感器感应电机矢量调速系统的结构图,图中感应电机角速度反馈量与给定速度量进行比较,用以在速度调节器asr中进行pi调节,通过给定速度与asr中的两变量进行变换,形成两变量中的dq轴信号。在此基础上,结合感应电机额定电流、额定角速度及实际角速度变量,形成矢量坐标系中的角度信号,实现矢量控制坐标系中的角度值的确定。最终,通过dq轴信号与确定的角度信号形成逆变器中的三相脉冲驱动信号,达到感应电机负载脉冲驱动的准确控制,实现高精度调速效果。
技术实现要素:
[0013]
结合矢量控制基本原理及速度传感器矢量控制系统框图中的流程。可以得到坐标变换公式,三变量到两变量坐标变换如下:
[0014][0015]
其矩阵形式为:
[0016][0017][0018]
式中,i
α
、i
β
为α、β绕组电流,i0为便于逆变换而增加的一相零序分量;ia、ib、ic分别为a、b、c感应电机三相定子电流。
[0019]
其两相到三相的变换矩阵方程式为:
[0020][0021]
其变换矩阵为:
[0022][0023]
两相静止坐标系下的电机电压方程为:
[0024][0025]
式中u
sα
,u
sβ
为定子侧坐标电压,rs为定子电阻,ls为定子电抗,lm为互感,p及积分算子,rr为转子电阻,lr为转子电抗。
[0026]
结合矢量控制策略,对三相感应电机进行调速精确快速控制,提高三相感应电机的控制性能,使其适用于更广的驱动领域。
附图说明
[0027]
图1矢量坐标变换原理
[0028]
图2速度传感器感应电机矢量控制系统结构图
[0029]
图3svpwm矢量控制感应电机调速系统仿真图
[0030]
图4dq轴电压变换模块结构
[0031]
图5角度信号处理及角速度处理模块结构
[0032]
图6dq轴电流变换模块结构
[0033]
图7电机转矩转速特性曲线
[0034]
图8电机加载负载后转速特性曲线
[0035]
图9电机加载负载后电磁转矩变化特性曲线
具体实施方式
[0036]
实施例子:
[0037]
本发明采用速度传感器感应电机矢量控制调速系统的实施参数如表1所示:
[0038]
表1 速度传感器感应电机矢量控制调速系统变量及参数值
[0039][0040]
通过表1中的实例参数,建立仿真模型并调试其运行环境。如图3所示为依据速度传感器矢量控制系统建立的调速系统仿真结构图,图中包括逆变电源结构模块、三相感应电机、感应电机信号取样模块、感应电机调速反馈模块、矢量控制系统模块等部分。通过该模型的建立可以验证该速度传感器系统的高精度与可靠性。
[0041]
如图4所示为两坐标变换三坐标的dq轴基于电压变化模块结构图,其为通过变量逻辑转换而建立的模型。通过该模型的建立可以实现矢量坐标变换的一个部分。
[0042]
如图5所示为速度传感器矢量控制系统中的角度信号处理与角速度处理模块结构,通过其中间变量及关系式的建立,可以实现角度信号的确定,为后续矢量控制系统的变量变换提供数据。
[0043]
如图6所示为速度传感器矢量控制系统中额定电流变换模块结构图,通过系统中的额定电流给定与变换,可以得到该调速系统的dq轴信号参数。
[0044]
通过如上步骤的实施,得到了感应电机速度传感器矢量控制系统的参数仿真模型,以下为该系统的结果,通过该结果可以看出该矢量调速控制系统的高精度控制与可靠
性。如图7所示为电机运行后的负载转矩与转速特性曲线,其波形体现该系统具有较好的稳定性,启动过程中在加载额定转矩后速度在1500rpm以内,调速过程超调量小,且加载额定转矩后的转速波动小,证明可靠性高。
[0045]
如图8所示为电机加载负载后的转速特性曲线,该曲线反应出负载加载后转速随时间变换的过程,结合转矩转速特性曲线与该曲线的对比,可以更明显的看出,该闭环矢量调速系统的调速性能较好,超调量小且稳定性高。
[0046]
如图9所示为电机负载加载后电磁转矩变化特性曲线,通过该曲线可以得到电机转矩变化的实时动态过程。从图中可以看出,电机启动过程中转矩存在一定的超调,这是用以提供电机从初始状态加速到稳定状态的加速度转矩,当电机空载达到了稳定后,其电磁转矩在短时间内下降到0位置,这一过程持续到其给定额定负载后才发生变化,当额定负载加载后电机电磁转矩得到了迅速的响应,且电磁转矩波动较小。最终在短时间内实现了与负载转矩相平衡的状态,实现电机高稳定性调速。
技术特征:
1.速度传感器感应电机矢量控制调速系统,其特征在于:将感应电机角速度作为反馈信号进行调节,通过角速度与矢量控制模块建立联系,实现感应电机的矢量控制模式。通过电机参数给定,将感应电机速度量转换为三相电流量的角度量,以此变量作为三相坐标转换为两相坐标中的角度变量,然后将此两相坐标系中的双变量转换到三变量参数,用以形成三相感应电机逆变部分的驱动脉冲信号,实现三相感应电机的高精度调速控制。成三相感应电机逆变部分的驱动脉冲信号,实现三相感应电机的高精度调速控制。2.如权利要求1所述速度传感器感应电机矢量控制调速系统,其特征在于:给定电流量为三相感应电机额定电流参数,这对其负载匹配度提出要求。3.如权利要求1所述速度传感器感应电机矢量控制调速系统,其特征在于:三相感应电机位置量是通过取定其角速度瞬时值而进行逻辑运算确定的,通过角速度瞬时值的取定与计算转换,可以得到感应电机矢量控制系统坐标系中的角度变量。4.如权利要求1所述速度传感器感应电机矢量控制调速系统,其特征在于:通过三相感应电机瞬时角速度变量的取定与给定电流信号两坐标系下的量经过变换得到的三变量,再由坐标变换获取感应电机逆变驱动信号的值,从而取得三相感应电机调速驱动信号准确值,实现精确调速定位。
技术总结
针对实际感应电机应用环境,其特点为开环控制精度较差,这对于稳定控制环境存在缺陷。因此,为了在控制要求较高环境能够适应其调速控制性能,提出感应电机闭环矢量控制系统。该方法通过感应电机速度传感器反馈与电机额定参量为基础,结合矢量坐标系变换原理,通过三变量到两变量变换再到三变量,实现感应电机闭环高效准确调速控制。通过仿真实例验证该速度传感器矢量控制系统的高精度控制的有效性与可靠性。可靠性。可靠性。
技术研发人员:丁志林 卜文萍 蔡兴 封淑玲
受保护的技术使用者:南昌工学院
技术研发日:2021.10.20
技术公布日:2022/2/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1