基于逆向行为重构的负荷频率容错控制系统及方法
:
1.本技术涉及互联电网负荷频率主动容错控制技术领域,特别涉及一种基于逆向行为重构的负荷频率容错控制系统及方法。
背景技术:
2.新型电力系统中不断并网的新能源装机容量显著,而其随机性和不确定性使得系统中各类显性和隐性故障增加,将导致送端电网有功出力显著下降,造成频率显著偏移额定运行点。此外,由于电网信息化程度的不断提高,网络传输过程中的各种不确定性因素(如延时、丢包、黑客攻击)给各类实时控制系统带来新的安全隐患。负荷频率控制(load frequency control,lfc)通过控制区域联络线交换功率,实现系统频率输入偏差到控制器输出控制量之间稳定控制。
3.运行状态全面感知与实时稳定控制是电力物联网中各类实时控制系统的基本要求。然而,信息子系统与物理子系统的紧耦合,致使恶意网络攻击及突发物理故障,都将导致电力物联网发生结构性改变,此种不确定性已违背鲁棒控制理论中参数小范围波动的假设。传统基于硬件冗余或故障辨识的容错控制策略由于需要依赖精确先验的被控系统参数和大量的运行状态参数,有控制器与被控系统不匹配的风险,导致容错失败。
技术实现要素:
4.有鉴于此,有必要提供一种不依赖故障辨识的基于逆向行为重构的负荷频率容错控制系统。
5.还有必要提供一种不依赖故障辨识的基于逆向行为重构的负荷频率容错控制的方法。
6.一种基于逆向行为重构的负荷频率容错控制系统,包括信息采集模块、控制器库模块、逆向行为重构模块、性能指标计算模块、控制器选择模块:
7.信息采集模块:利用设置在被控系统的传感器采集感知被控系统的运行参数,根据接收的运行参数产生对应的被控系统输出量y'(t)。
8.控制器库模块:针对预计的信息/物理故障,设计对应的控制器以保证故障系统的动态性能,形成基本控制器库,其中,基本控制器库中控制器数量为m+n,控制器库σc={σ
c1
,σ
c2
,
…
,σ
c(m+n)
},控制器库σc表示针对特定运行场景所设计的控制器集合,m是指被控系统具有m种正常工作场景,n是指被控系统具有n种典型故障场景;
9.逆向行为重构模块:根据被控系统输出量y'(t)、控制指令u'(t)以及已有的控制器库σc,以并行方式逆向重构被控系统的动态行为,并获得重构的参考输入重构的参考输入渐近收敛于理想的参考输入r(t)。
10.性能指标计算模块:将被控系统输出量y'(t)、重构的参考输入做均方根误差计算,以获得性能指标mse;
11.控制器选择模块:选择与最小的性能指标mse对应的控制器投入,从而实现零试错一次性精准投切。
12.一种基于逆向行为重构的负荷频率容错控制方法,其步骤如下:
13.针对预计的信息/物理故障,设计对应的控制器以保证故障系统的动态性能,形成基本控制器库,其中,基本控制器库中控制器数量为m+n,令σc={σ
c1
,σ
c2
,
…
,σ
c(m+n)
}表示针对特定运行场景所设计的控制器集合,m是指被控系统具有m种正常工作场景,n是指被控系统具有n种典型故障场景;
14.接收通过传感器采集感知被控系统的运行参数,根据接收的运行参数产生对应的被控系统输出量y'(t);
15.接收控制中心根据传感器采集感知被控系统的运行参数产生的控制指令u'(t);
16.根据被控系统输出量y'(t)、控制指令u'(t)以及已有的控制器库σc,以并行方式逆向重构被控系统的动态行为,并获得重构的参考输入重构的参考输入渐近收敛于理想的参考输入r(t);
17.将被控系统输出量y'(t)、重构的参考输入做均方根误差计算,以获得性能指标mse;
18.选择与最小的性能指标mse对应的控制器投入,从而实现零试错一次性精准投切。
19.上述基于逆向行为重构的负荷频率容错控制系统及方法中,提出了逆向行为重构策略,针对预计的信息/物理故障设计对应的控制器以保证故障系统的动态性能,其无需获取先验的故障信息,仅依赖于系统的输入与输出测量值,从而能够尽可能地实现对故障的容错,为信息/物理紧耦合的电力物联网在复杂多样故障情形下的稳定性控制和系统稳定运行提供更好的性能。
附图说明:
20.图1为基于逆向行为重构的负荷频率容错控制系统功能模块图;
21.图2为基于逆向行为重构的负荷频率容错控制系统框架示意图;
22.图3为控制器库框架示意图;
23.图4为三区域互联电力系统结构图;
24.图5为area 1-area 3的正常通信延时;
25.图6为area 2遭受延时攻击时的通信延时;
26.图7为area 1-area 3负荷波动;
27.图8是不同故障情形下δf1及δp
tie1
的均方误差。
28.图中:基于逆向行为重构的负荷频率容错控制系统10、信息采集模块20、控制器库模块30、逆向行为重构模块40、性能指标计算模块50、控制器选择模块60。
具体实施方式:
29.本技术的目的是针对电力物联网信息/物理故障,提供一种不依赖于故障辨识的负荷频率容错控制系统,其核心思想是将最匹配的控制器以零试错的方式投入到控制器回路中。首先,针对预计的信息/物理故障设计对应的控制器以保证故障系统的动态性能,形成基本控制器库。然后,设计控制器切换策略,根据性能评估结果将投入最优控制器,保证
系统的安全稳定运行。下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本技术,但不用来限制本技术的范围。
30.请同时参看图1至图3,基于逆向行为重构的负荷频率容错控制系统10,包括信息采集模块20、控制器库模块30、逆向行为重构模块40、性能指标计算模块50、控制器选择模块60:
31.信息采集模块20:利用设置在被控系统的传感器采集感知被控系统的运行参数,根据接收的运行参数产生对应的被控系统输出量y'(t)。
32.控制器库模块30:针对预计的信息/物理故障,设计对应的控制器以保证故障系统的动态性能,形成基本控制器库,其中,基本控制器库中控制器数量为m+n,控制器库σc={σ
c1
,σ
c2
,
…
,σ
c(m+n)
},控制器库σc表示针对特定运行场景所设计的控制器集合,m是指被控系统具有m种正常工作场景,n是指被控系统具有n种典型故障场景;
33.逆向行为重构模块40:根据被控系统输出量y'(t)、控制指令u'(t)以及已有的控制器库σc,以并行方式逆向重构被控系统的动态行为,并获得重构的参考输入重构的参考输入渐近收敛于理想的参考输入r(t)。上述重构过程,即无需依次将预设控制器投切到控制回路中,仅通过控制参数和任意检测时间段内控制中心的控制指令,总能够重构出控制器库中所有预设控制器的动态行为,为控制器的性能评估奠定基础。
34.性能指标计算模块50:将被控系统输出量y'(t)、重构的参考输入做均方根误差计算,以获得性能指标mse;其中,均方误差mse定义为重构的参考输入被控系统输出量y'(t)两个变量之间差异程度的一种度量,即
[0035][0036]
mse这个指数可以从数值上准确表示在信息不确定情况下,不同控制器的控制偏差。其中,由于实时控制系统的控制目标为被控系统输出y'(t)实时跟踪理想的参考输入r(t),如发电机转速、频率f等状态量,对于实际的被控系统,其控制目标为区域控制误差ace为0,即r(t)-y'(t)=0,因此采用重构参考输入与被控系统输出y'(t)间偏差的mse指数作为控制器动态性能的衡量指标。
[0037]
控制器选择模块60:选择与最小的性能指标mse对应的控制器投入,从而实现零试错一次性精准投切。例如,根据计算得到的性能指标{mse1,mse2,
…
,mse
m+n
},以零试错的方式选择最匹配的控制器投入到控制回路中,即选择性能指标mse最小的预设控制器投入,即
[0038][0039]
其中,基本控制器库中的控制器集合通过如下方式获得:
[0040]
1)建立信息/物理故障的实时控制系统模型:
[0041]
给出正常情形下的被控系统中的被控对象模型:
[0042][0043]
式中,x∈r
p
、u∈rq、ω∈rr和y∈rv分别为状态变量、输入变量、外部扰动变量和输
出变量,矩阵a、b、h、c、d为适维矩阵。
[0044]
根据被控系统中出想的故障作用效果进行建模:
[0045]
(1)故障类型建模
[0046]
a.数据类故障建模,此类故障下,实际的控制量/量测量与真实之间满足如下关系:
[0047]
控制量:uf(t)=γ
p
γcu(t)
[0048]
量测量:yf(t)=ψcψ
p
y(t)
[0049]
式中,下标f表示故障状态,表示执行器物理故障矩阵;表示控制器与执行器间网络故障矩阵;表示传感器与控制器间网络信息故障矩阵;表示传感器物理故障矩阵;
[0050]
b.时效类故障建模,令τ
sc
表示传感器至控制器的网络延时,τ
ca
为控制器至被控系统中的执行器的网络延时,控制器发出的控制指令为u'(t),接收的被控系统输出量为y'(t),与被控系统中的执行器实际接收的控制中心提供的控制指令u(t)以及被控系统实际输出量y(t)满足
[0051]
u(t)=u'(t+τ
ca
)
[0052]
y'(t)=y(t+τ
sc
)
[0053]
进一步地,采用pade逼近技术对上述纯时滞环节进行近似化处理,逼近后的状态空间表述为
[0054][0055][0056]
式中,x
ca
(t)、x
sc
(t)为pade近似引入的中间变量,ak,bk,ck,dk分别为
[0057][0058][0059]
其中,k={sc,ca},lk为逼近阶数,ai和bi(i=1,2,
…
,lk)为逼近系数,由下式给出:
[0060]
[0061]
c.组件类故障建模,此类故障下,被控系统原有的运行结构发生明显变化,表现为状态空间描述发生异常,即
[0062][0063]
式中,a'、b'、h'、c'、d'表示故障发生后的被控系统矩阵。
[0064]
(2)信息/物理混合故障建模
[0065]
基于对三类故障的数学建模,令增广向量x=[x,x
ca
,x
sc
]
t
,建立计及信息/物理混合故障的电力物联网实时控制系统状态方程为
[0066][0067]
式中,af=a',bf=b'γ
p
γc,hf=h',cf=ψcψ
p
c',df=ψcψ
p
d'γ
p
γc;
[0068]
2)基本控制器库范式化设计方法:
[0069]
实时控制系统状态方程具有模型不确定性,因此控制器设计必须对模型不确定性具备优良的鲁棒性,本技术参照混合h2/h
∞
方法进行基本控制器设计实现对已知故障的鲁棒控制;
[0070]
考虑被控系统具有m种正常工作场景和n种典型故障场景,故基本控制器库中控制器数量为m+n,令σc={σ
c1
,σ
c2
,
…
,σ
c(m+n)
}表示针对特定运行场景所设计的控制器集合,具有如下一般形式:
[0071][0072]
式中,j=1,2,
…
,m+n,x
uj
(t)为控制器引入的中间变量,a
uj
,b
uj
,c
uj
,d
uj
为控制器系统矩阵。
[0073]
进一步的,本技术还提供一种基于逆向行为重构的负荷频率容错控制方法,其步骤如下:
[0074]
步骤s300,针对预计的信息/物理故障,设计对应的控制器以保证故障系统的动态性能,形成基本控制器库,其中,基本控制器库中控制器数量为m+n,令σc={σ
c1
,σ
c2
,
…
,σ
c(m+n)
}表示针对特定运行场景所设计的控制器集合,m是指被控系统具有m种正常工作场景,n是指被控系统具有n种典型故障场景;
[0075]
步骤s303,接收通过传感器采集感知被控系统的运行参数,根据接收的运行参数产生对应的被控系统输出量y'(t);
[0076]
步骤s305,接收控制中心根据传感器采集感知被控系统的运行参数产生的控制指令u'(t);
[0077]
步骤s307,根据被控系统输出量y'(t)、控制指令u'(t)以及已有的控制器库σc,以并行方式逆向重构被控系统的动态行为,并获得重构的参考输入重构的参考输入渐近收敛于理想的参考输入r(t);
[0078]
步骤s309,将被控系统输出量y'(t)、重构的参考输入做均方根误差计算,以获得性能指标mse;
[0079]
步骤s311,选择与最小的性能指标mse对应的控制器投入,从而实现零试错一次性精准投切。
[0080]
其中,“针对预计的信息/物理故障,设计对应的控制器以保证故障系统的动态性能,形成基本控制器库,其中,基本控制器库中控制器数量为m+n,令σc={σ
c1
,σ
c2
,
…
,σ
c(m+n)
}表示针对特定运行场景所设计的控制器集合,m是指被控系统具有m种正常工作场景,n是指被控系统具有n种典型故障场景”步骤具体为:
[0081]
1)建立信息/物理故障的实时控制系统模型:
[0082]
给出正常情形下的被控系统中的被控对象模型:
[0083][0084]
式中,x∈r
p
、u∈rq、ω∈rr和y∈rv分别为状态变量、输入变量、外部扰动变量和输出变量,矩阵a、b、h、c、d为适维矩阵。
[0085]
根据被控系统中出想的故障作用效果进行建模:
[0086]
(1)故障类型建模
[0087]
a.数据类故障建模,此类故障下,实际的控制量/量测量与真实之间满足如下关系:
[0088]
控制量:uf(t)=γ
p
γcu(t)
[0089]
量测量:yf(t)=ψcψ
p
y(t)
[0090]
式中,下标f表示故障状态,表示执行器物理故障矩阵;表示控制器与执行器间网络故障矩阵;表示传感器与控制器间网络信息故障矩阵;表示传感器物理故障矩阵;
[0091]
b.时效类故障建模,令τ
sc
表示传感器至控制器的网络延时,τ
ca
为控制器至被控系统中的执行器的网络延时,控制器发出的控制指令为u'(t),接收的被控系统输出量为y'(t),与被控系统中的执行器实际接收的控制中心提供的控制指令u(t)以及被控系统实际输出量y(t)满足
[0092]
u(t)=u'(t+τ
ca
)
[0093]
y'(t)=y(t+τ
sc
)
[0094]
进一步地,采用pade逼近技术对上述纯时滞环节进行近似化处理,逼近后的状态空间表述为
[0095]
[0096][0097]
式中,x
ca
(t)、x
sc
(t)为pade近似引入的中间变量,ak,bk,ck,dk分别为
[0098][0099][0100]
其中,k={sc,ca},lk为逼近阶数,ai和bi(i=1,2,
…
,lk)为逼近系数,由下式给出:
[0101][0102]
c.组件类故障建模,此类故障下,被控系统原有的运行结构发生明显变化,表现为状态空间描述发生异常,即
[0103][0104]
式中,a'、b'、h'、c'、d'表示故障发生后的被控系统矩阵;
[0105]
(2)信息/物理混合故障建模
[0106]
基于对三类故障的数学建模,令增广向量x=[x,x
ca
,x
sc
]
t
,建立计及信息/物理混合故障的电力物联网实时控制系统状态方程为
[0107][0108]
式中,af=a',bf=b'γ
p
γc,hf=h',cf=ψcψ
p
c',df=ψcψ
p
d'γ
p
γc;
[0109]
2)基本控制器库范式化设计方法:
[0110]
实时控制系统状态方程具有模型不确定性,因此控制器设计必须对模型不确定性具备优良的鲁棒性,本技术参照混合h2/h
∞
方法进行基本控制器设计实现对已知故障的鲁棒控制;
[0111]
考虑被控系统具有m种正常工作场景和n种典型故障场景,故基本控制器库中控制器数量为m+n,令σc={σ
c1
,σ
c2
,
…
,σ
c(m+n)
}表示针对特定运行场景所设计的控制器集合,具有如下一般形式:
[0112][0113]
式中,j=1,2,
…
,m+n,x
uj
(t)为控制器引入的中间变量,a
uj
,b
uj
,c
uj
,d
uj
为控制器
系统矩阵;
[0114]
其中,“根据被控系统输出量y'(t)、控制指令u'(t)以及已有的控制器库σc,以并行方式逆向重构被控系统的动态行为,并获得重构的参考输入重构的参考输入渐近收敛于理想的参考输入r(t)”步骤具体为:
[0115]
获得实时控制系统的动态行为:
[0116]
定义信号向量s(t)=[ω(t),r(t),y'(t),u'(t)]
t
,基于laplace变换与多项式矩阵初等行变换方法,被控系统与控制器的动态行为可描述为
[0117]
被控系统:
[0118]bp
={s=(r,y
′
,u
′
)
t
|[-n
p2
(ξ)0d
p
(ξ)-n
p1
(ξ)]s(t)=0}
[0119]
控制器:
[0120]bcj
={s=(r,y
′
,u
′
)
t
|[0n
cj
(ξ)-n
cj
(ξ)-d
cj
(ξ)]s(t)=0}
[0121]
式中,ξ=d/dt,n
p1
(ξ)、n
p2
(ξ)、d
p
(ξ)、n
cj
(ξ)、d
cj
(ξ)为适维多项式矩阵;
[0122]
由上述两式可知被控对象与控制器通过共同的变量由上述两式可知被控对象与控制器通过共同的变量互联,被控对象的动态行为可通过与控制器耦合变量[r(t),y'(t),u'(t)]
t
互联实现;
[0123]
根据被控系统的动态行为模型可知,控制器σ
cj
在任意检测周期内的动态行为b
cj
可以仅通过y'(t)和u'(t)实现完全重构,而无需精确的先验系统运行参数与故障信息;令为重构的控制器动态行为,满足
[0124][0125]
式中,为σ
cj
重构的参考输入,若σ
cj
为与当前被控系统运行状态匹配的控制器,则重构参考输入渐近收敛于理想的参考输入r(t);
[0126]
其中,“将被控系统输出量y'(t)、重构的参考输入做均方根误差计算,以获得性能指标mse”的步骤具体为;
[0127]
将被控系统输出量y'(t)、重构的参考输入做均方根误差计算,以获得性能指标mse;其中,均方误差mse定义为重构的参考输入被控系统输出量y'(t)两个变量之间差异程度的一种度量,即
[0128][0129]
mse这个指数可以从数值上准确表示在信息不确定情况下,不同控制器的控制偏差。其中,由于实时控制系统的控制目标为被控系统输出y'(t)实时跟踪理想的参考输入r(t),如发电机转速、频率f等状态量,对于实际的被控系统,其控制目标为区域控制误差ace为0,即r(t)-y'(t)=0,因此采用重构参考输入与被控系统输出y'(t)间偏差的mse指数作为控制器动态性能的衡量指标;
[0130]
其中,“选择与最小的性能指标mse对应的控制器投入,从而实现零试错一次性精准投切”步骤具体为:
[0131]
根据计算得到的性能指标{mse1,mse2,
…
,mse
m+n
},以零试错的方式选择最匹配的
控制器投入到控制回路中,即选择性能指标mse最小的预设控制器投入,即
[0132][0133]
上述基于逆向行为重构的负荷频率容错控制系统及方法中,提出了逆向行为重构策略,针对预计的信息/物理故障设计对应的控制器以保证故障系统的动态性能,其无需获取先验的故障信息,仅依赖于系统的输入与输出测量值,从而能够尽可能地实现对故障的容错,为信息/物理紧耦合的电力物联网在复杂多样故障情形下的稳定性控制和系统稳定运行提供更好的性能。
[0134]
以下通过实施例说明本技术的重构-aftc策略效果:
[0135]
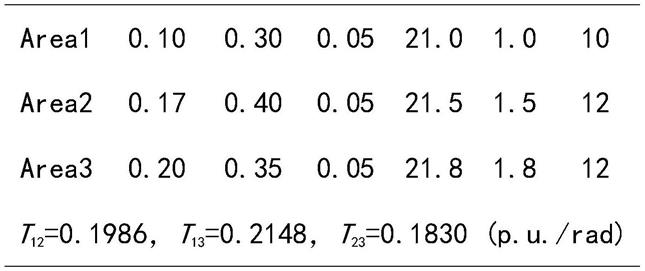
本技术以如图4所示的三区域互联电力系统负荷频率控制为研究对象进行仿真实验,电网频率可由同步相量测量装置(phasor measurement unit,pmu)获取,并通过通信网络上传到控制中心,同时控制中心的控制指令则通过通信网络发送到同步发电机组,通过实时调节同步发电机组有功出力维持电力系统在额定频率下有功功率供需平衡,仿真参数如表1所示.表1仿真实验参数
[0136][0137][0138]
考虑各区域仅发生单一故障,持续时间50s。设area 1-area 3的正常通信延时、area 2网络攻击延时以及area 1-area 3负荷阶跃波动分别如图5、图6和图7所示。表2示出了三区域互联系统可能的运行场景,共8种。采用的对比方法为:考虑所有故障情形渐进稳定的被动容错控制(pftc)策略与基于故障辨识的主动容错控制策略(故障辨识-aftc)。为对比分析所提容错策略与现有容错策略的优异性,计算故障情形下相较于正常情形的均方根误差(mean square error,mse)加以量化说明,如图8所示。
[0139]
表2互联电力系统可能运行场景(每区域内单一故障)
[0140][0141]
根据图8可知,采用pftc策略时,δf1及δp
tie1
的均方根误差总体上大于aftc,仅在故障情形2和6时略优于aftc策略(其余情形下的δf1及δp
tie1
均方根误差至少高18.40%和220%)。而所提行为重构-aftc策略的性能指标与故障辨识-aftc策略相比在控制性能上则大致接近,但由于所提方案在选择最匹配控制器时仅依赖被控系统的输入/输出量而无需依赖精确的先验系统参数知识,且能达到相近的容错效果,因而实用性更强。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1