基于自适应下垂控制的永磁直驱风电场无功电压控制策略
1.本发明属于电力系统自动化领域,涉及一种基于自适应下垂控制的永磁直驱风电场无功电压控制策略。
背景技术:
2.风力发电作为一种可再生能源发电技术,已经被广泛运用于电力系统中,然而风电大规模并网往往会对系统的稳定运行造成影响。国内风电场一般位于偏远地区,所连接的电网稳定性相对薄弱,当风电场输出功率发生较大变化时,会使并网点电压稳定性明显降低,进而影响电力系统的安全稳定。近年来我国发生了多起大规模风电机组连锁脱网事故,都与风电场无功功率和电压控制有密切的关系。目前国内外针对改善风电场无功功率水平和并网点电压质量的研究,主要从两个方面进行:在系统中配置无功补偿设备以保障风电场的电压稳定,或从风电场自身出发,制定风电场无功控制方案措施。
3.由于额外配置无功补偿设备需要增加一定的投资,通过让风电场参与无功调节已成为一种较为经济的调节手段。永磁直驱式风电机组与双馈式风电机组都具有一定的无功调节能力,当电网跌落较小时,依靠风电机组自身的无功补偿可以满足要求。永磁直驱式风电机组对比双馈式机组具有更好的无功电压特性,利用永磁直驱式风电机组自身的无功调节能力为系统提供无功支撑已成为无功电压控制的重要手段。当系统电压降低时,永磁直驱式风电机组的网侧变流器对有功、无功解耦控制,通过调节能够快速向电网提供一定无功支撑。目前风电机组电压控制策略普遍采用固定下垂增益,无法根据各风电机组的无功容量,进行合理分配,对此需要一种能够适应各风速情况对风电机组无功功率进行自适应调整的优化控制策略。
技术实现要素:
4.为解决上述技术问题,本发明提供了一种基于自适应下垂控制的永磁直驱风电场无功电压控制策略,解决现有技术中因采用固定下垂增益导致的无功功率分配不均的问题。
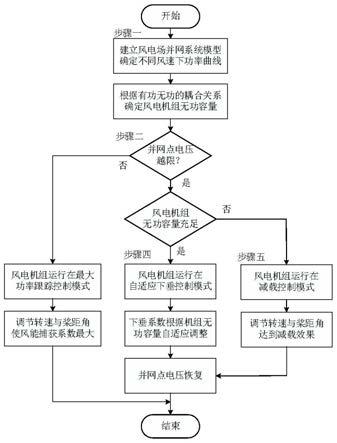
5.本发明所述的基于自适应下垂控制的永磁直驱风电场无功电压控制策略,所述控制策略的步骤为:
6.步骤1、建立由永磁直驱式风电机组、静态负荷与同步发电机组成的风电场并网系统模型,确定风电机组在不同风速下的输出功率曲线,再根据有功与无功之间的耦合关系,确定风电机组不同运行状态下的无功容量;
7.步骤2、检测风电场并网点电压,若并网点电压正常,则采用最大功率跟踪控制模式,进行步骤3;若并网点电压越限,则先对无功容量进行判断,当无功容量充足时,网侧变流器采用自适应下垂控制,进行步骤4;当无功容量不足时,在采用自适应下垂控制的同时进行减载控制,进行步骤5;
8.步骤3、风电机组采用最大功率跟踪控制模式运行,根据当前风速调节风力机转
速,使叶尖速比保持最优值从而达到最大风能捕获状态,风电机组输出最大有功功率;
9.步骤4、风电机组采用自适应下垂控制,网侧变流器无功控制环节设置自适应下垂系数,可随风速的变化自动调整,合理分配各机组的无功输出以支撑并网点电压,保障系统稳定运行;
10.步骤5、风电机组采用减载运行模式,根据风速变化采用对应的减载方法,调节转子转速并结合桨距角控制实现减载,增加无功输出,网侧变流器保持自适应下垂控制。
11.进一步的,步骤1中,根据永磁直驱风电机组运行特性,建立永磁直驱风电机组并网系统模型,并确定风速与叶尖速比曲线的关系曲线;风力机捕获功率与其转速与桨距角相关,标幺值p
wt
为:
[0012][0013]
式中,pn为风电机组额定功率,ρ为空气密度,r为风轮半径,vw为风速值,c
p
为风能捕获系数,可表示为
[0014][0015]
式中,λ为叶尖速比,ωn为转子额定机械转速,c1~c6为拟合系数,ω
t
为转子转速,β为桨距角;拟合系数取不同值时,c
p
函数具有不同的最优叶尖速比λ
opt
和最大风能捕获系数c
pmax
;
[0016]
风电机组无功容量由有功功率与视在功率决定
[0017][0018]
式中:sw为风电机组变流器视在功率。
[0019]
进一步的,步骤3中,风电机组正常运行在最大功率跟踪模式下,根据风速变化将跟踪过程分为三个阶段:
[0020]
第一阶段为最优转速运行阶段,当风能捕获系数c
p
函数取得最大值时对应固定的最优叶尖速比λ
opt
,调节风力机转速ω
t
使其维持叶尖速比为λ
opt
,在此情形下,风力机以最优转速运行并捕获最大风能;
[0021]
第二阶段为恒转速运行阶段,当风速继续增大且捕获功率未超过风力机额定功率时,风力机转子转速维持在ω
tmax
以恒转速方式运行;
[0022]
第三阶段为恒功率运行阶段,当风速超过风电机组额定功率所对应的额定风速v
wn
时,需要使风力机运行在恒功率状态下以防过载,由于风力机转速达到上限,需要增大桨距角限制风电机捕获功率。
[0023]
进一步的,步骤4中,变流器中网侧变流器采用自适应下垂控制,下垂系数的整定原则依据风电机组当前的无功容量;自适应下垂控制环节的无功电流输出定义为:
[0024][0025][0026]
式中:k
p
为pi调节器的比例系数,ki为pi调节器的积分系数,1/s为积分环节,q0为无功功率基准值,通常设为0,v
sys
为电压有效值,v
nom
为额定电压值,为自适应下垂系数,自适应下垂系数与风电机组的无功功率成正比,q
w,i
为i号风电机组的无功功率;c为常系数。
[0027]
进一步的,步骤5中,所述减载运行模式控制的方法为:
[0028]
确定保障并网电压稳定情况下,需要提供给并网点的无功功率最小值q
l
,由于风电机组输出功率满足且风电机组越接近额定状态,减载相同功率所释放的无功容量越大,因此需要判别各个机组的减载优先级,并选取风电机组进行减载控制;
[0029][0030][0031][0032]
式中:s为风电机组的额定功率;为i号风电机组的有功输出;δp为减载量;δq
w,i
为第i号风电机组减载后的无功增量,k为进行减载的风电机组编号,j为进行减载的风电机组台数,n为风电场中的机组台数,δqk为k号风电机组减载后的无功增量,q
w,i
为风电机组输出无功功率,q
l
为风电场提供给并网点的无功支撑;当风电机组进行减载控制时,其减载水平d%可表示为d%=δp
w,i
/p
w,i
。
[0033]
进一步的,减载运行模式控制时考虑不同风速区间确定减载模式的步骤为:根据风速大小分为低、中、高三个风速区间并在各区间采用不同的减载控制方法,在低风速区间,风电机组处于最大功率跟踪运行状态,此时风能捕获系数达到最大c
pmax
,桨距角β为0
°
,当需要减载d%时,根据叶尖速比-风能捕获系数曲线,求出c
pmax
减小d%时对应的叶尖速比λ
d1
,进而求得减载后的转子参考转速ω
d1
;
[0034]
在中风速区间风电机组同样处于最大功率跟踪运行状态,转子处于最优转速ω
opt
,对应有功功率为p
opt
,当需要减载d%时,若在超速减载过程中转子转速达到最大允许转速ω
max
,则需要配合桨距角控制实现减载,变桨控制的参考功率设定为:
[0035][0036]
在高风速区间内,当v
w2
《vw《v
wn
时,风电机组处于恒转速运行模式,需要减载d%时,计算减载后的风能捕获系数c
pd
,并利用牛顿法求解桨距角βd进行调节,当v
wn
《vw《v
w_out
时,风
电机组处于恒功率运行模式,风电机组输出功率为额定功率pn,需要减载d%时,只需将参考功率设定为(1-d%)pn即可。
[0037]
本发明的有益效果为:本发明提出的永磁直驱电场无功电压控制策略,可以跟踪并网点电压变化,快速实施无功电压调节,对风电场并网点电压实现准确控制,避免系统发生扰动或故障情况下导致的电压越限问题,保障系统的安全稳定运行;此外本发明采用的控制策略充分利用了风电机组自身的无功容量,从而减少配置额外的无功补偿装置,提高系统运行的经济性。
附图说明
[0038]
为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明。
[0039]
图1为无功电压控制流程图;
[0040]
图2为风能利用系数与叶尖速比关系曲线;
[0041]
图3为自适应下垂控制环节;
[0042]
图4为风电机组功率-转速特性曲线;
[0043]
图5为低、中、高风速划分曲线。
具体实施方式
[0044]
如图1所示,本发明所述的基于自适应下垂控制的永磁直驱风电场无功电压控制策略,所述控制策略的步骤为:
[0045]
步骤1、建立由永磁直驱式风电机组、静态负荷与同步发电机组成的风电场并网系统模型,确定风电机组在不同风速下的输出功率曲线,再根据有功与无功之间的耦合关系,确定风电机组不同运行状态下的无功容量;
[0046]
步骤2、检测风电场并网点电压,若并网点电压正常,则采用最大功率跟踪控制模式,进行步骤3;若并网点电压越限,则先对无功容量进行判断,当无功容量充足时,网侧变流器采用自适应下垂控制,进行步骤4;当无功容量不足时,在采用自适应下垂控制的同时进行减载控制,进行步骤5;
[0047]
步骤3、风电机组采用最大功率跟踪控制模式运行,根据当前风速调节风力机转速,使叶尖速比保持最优值从而达到最大风能捕获状态,风电机组输出最大有功功率;
[0048]
步骤4、风电机组采用自适应下垂控制,网侧变流器无功控制环节设置自适应下垂系数,可随风速的变化自动调整,合理分配各机组的无功输出以支撑并网点电压,保障系统稳定运行;
[0049]
步骤5、风电机组采用减载运行模式,根据风速变化采用对应的减载方法,调节转子转速并结合桨距角控制实现减载,增加无功输出,网侧变流器保持自适应下垂控制。
[0050]
步骤1中,确定风电机组在不同风速下的输出功率曲线,再根据有功与无功之间的耦合关系,确定风电机组不同运行状态下的无功容量的具体方法为:
[0051]
风力机捕获功率与其转速与桨距角相关,标幺值p
wt
为:
[0052]
[0053]
式中,pn为风电机组额定功率,ρ为空气密度,r为风轮半径,vw为风速值,c
p
为风能捕获系数,可表示为
[0054][0055]
式中,λ为叶尖速比,ωn为转子额定机械转速,c1~c6为拟合系数,ω
t
为转子转速,β为桨距角;拟合系数取不同值时,c
p
函数具有不同的最优叶尖速比λ
opt
和最大风能捕获系数c
pmax
。
[0056]
风电机组具有桨距角控制系统,可以调节捕获功率和限制风轮转速;系统运行时需要限制风力机转速不超过上限ω
tmax
,当风力机转速ω
t
小于ω
tmax
时,桨距角控制不起作用,β设为0
°
;
[0057]
当桨距角一定时,可通过调节叶尖速比使风能利用系数达到最大值,如图2所示;电机组运行过程中,通过控制风力机转速,使其保持当前风速所对应的最佳转速,即可得到风能捕获系数。
[0058]
风电机组无功容量由有功功率与视在功率决定:
[0059][0060]
式中:sw为风电机组变流器视在功率。
[0061]
当风电机组输出功率已达到额定功率且无功缺额较大,可根据有功功率与无功功率的关系,通过减载运行来增加风电机组的无功裕度。
[0062]
步骤2中,通过测量并网点电压是否越限,来选择风电机组控制模式;当并网点电压在0.95-1.05pu范围内采用最大功率跟踪控制模式;当并网点电压低于0.95pu时,进行无功容量判断:若无功容量高于无功需求q
l
,则采用自适应下垂控制,进入步骤四,若无功容量低于无功需求q
l
,则采用减载控制,进入步骤五。
[0063]
步骤3中,风电机组运行在最大功率跟踪模式下,为使风能利用系数最大,需控制风机转速跟踪最优转速即可实现最大功率跟踪控制。
[0064]
根据风速变化将跟踪过程分为三个阶段:第一为最优转速运行阶段,当风能捕获系数c
p
函数取得最大值时对应固定的最优叶尖速比λ
opt
,调节风力机转速ω
t
使其维持叶尖速比为λ
opt
,在此情形下,风力机以最优转速运行并捕获最大风能;第二为恒转速运行阶段,当风速继续增大且捕获功率未超过风力机额定功率时,风力机转子转速维持在ω
tmax
以恒转速方式运行;第三为恒功率运行阶段,当风速超过风电机组额定功率所对应的额定风速v
wn
时,需要使风力机运行在恒功率状态下以防过载,由于风力机转速达到上限,需要增大桨距角限制风电机捕获功率。
[0065]
步骤4中,风电机组运行在自适应下垂控制模式下,网侧变流器对无功功率采用自适应下垂控制,下垂系数根据风电机组当前的无功容量自适应调整;当风电机组可释放的无功功率较大时,其下垂系数可设置大一些;而当可释放的无功功率较小时,则设置较小的下垂系数。自适应下垂控制的原理如图3所示,减载控制模式下,自适应下垂控制环节的无
功电流输出定义为:
[0066][0067][0068]
式中:k
p
为pi调节器的比例系数,ki为pi调节器的积分系数,1/s为积分环节,q0为无功功率基准值,通常设为0,v
sys
为电压有效值,v
nom
为额定电压值,为自适应下垂系数,自适应下垂系数与风电机组的无功功率成正比,q
w,i
为i号风电机组的无功功率;c为常系数。
[0069]
自适应下垂系数是关于空间和时间的变量,风电机组的输入风速随时间变化,下垂系数可以随风速的变化进行自适应调整,有助于系统稳定运行。此外,由于下垂系数可跟随增大的无功容量自适应增加,避免了风电机组频繁达到最大无功功率限制,有助于减少变流器的磨损。
[0070]
步骤5中,减载运行模式控制的方法:确定风电场在保障并网电压稳定情况下,需要提供给并网点的无功功率最小值q
l
,由于风电机组输出功率满足且风电机组越接近额定状态,减载相同功率所释放的无功容量越大,因此需要判别各个机组的减载优先级,并选取风电机组进行减载控制;
[0071][0072][0073][0074]
式中:s为风电机组的额定功率;为i号风电机组的有功输出;δp为减载量;δq
w,i
为第i号风电机组减载后的无功增量,k为进行减载的风电机组编号,j为进行减载的风电机组台数,n为风电场中的机组台数,δqk为k号风电机组减载后的无功增量,q
w,i
为风电机组输出无功功率,q
l
为风电场提供给并网点的无功支撑;当风电机组进行减载控制时,其减载水平d%可表示为d%=δp
w,i
/p
w,i
。
[0075]
风电机组的功率-转速特性曲线如图4所示,表示风速一定时不同桨距角下风电机组输出功率与转速间的关系。当风速为v
w0
时,运行点a为最大功率运行点,运行点b为超速减载运行点,运行点c为变桨点,将桨距角从β0增加至β1,特性曲线整体下降,风电机组捕获功率减小从而实现减载。
[0076]
风电机组运行在减载控制模式下,根据风速大小将风速划分为低、中、高三个区间,如图5所示,低风速区域为abb'a'所围成区域,通过超速控制以满足减载要求;中风速区域为bcb'所围成区域,由于最高转速限制,需要通过转速与桨距角协调控制进行减载,高风速区域为线段c'd,c'点由c点经过变桨距控制得到,d点对应风速为风力机切出风速v
w_out
,
在高风速区间内由于转速已经达到最大,无法进行超速控制,只能通过变桨距控制实现减载。低风速区间为切入风速v
w_in
~v
w1
,中风速区间为v
w1
~v
w2
,高风速区间为v
w2
~v
w_out
。
[0077][0078]
式中:ω
max
为风力机最大允许转速,λd为减载后叶尖速比,与减载水平相关,λ
opt
为最优叶尖速比,减载水平d%可表示为d%=δp
w,i
/p
w,i
。
[0079]
在低风速区间,风电机组处于最大功率跟踪运行状态,此时风能捕获系数达到最大c
pmax
,桨距角β为0
°
,当需要减载d%时,根据叶尖速比-风能捕获系数曲线,求出c
pmax
减小d%时对应的叶尖速比λ
d1
,进而求得减载后的转子参考转速ω
d1
。
[0080]
在中风速区间风电机组同样处于最大功率跟踪运行状态,转子处于最优转速ω
opt
,对应有功功率为p
opt
,当需要减载d%时,若在超速减载过程中转子转速达到最大允许转速ω
max
,则需要配合桨距角控制实现减载,变桨控制的参考功率设定为:
[0081][0082]
在高风速区间内,当v
w2
《vw《v
wn
时,风电机组处于恒转速运行模式,需要减载d%时,计算减载后的风能捕获系数c
pd
,并利用牛顿法求解桨距角βd进行调节,当v
wn
《vw《v
w_out
时,风电机组处于恒功率运行模式,风电机组输出功率为额定功率pn,需要减载d%时,只需将参考功率设定为(1-d%)pn即可。
[0083]
当并网点电压恢复后,风电机组恢复到减载控制之前的运行状态,以保证在满足系统无功需求的同时,增加风电机组输出功率。
[0084]
以上所述仅为本发明的优选方案,并非作为对本发明的进一步限定,凡是利用本发明说明书及附图内容所作的各种等效变化均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1