一种步进电机的误差修正方法、样本分析装置、存储介质与流程
本申请涉及电机,特别涉及一种步进电机的误差修正方法、样本分析装置、存储介质。
背景技术:
1、步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。
2、在步进电机的具体应用中,往往会产生误差,误差累计到一定的程度,会影响步进电机的控制精度。
技术实现思路
1、为了解决上述问题,本申请提供一种步进电机的误差修正方法、样本分析装置、存储介质,能够提高步进电机的控制精度。
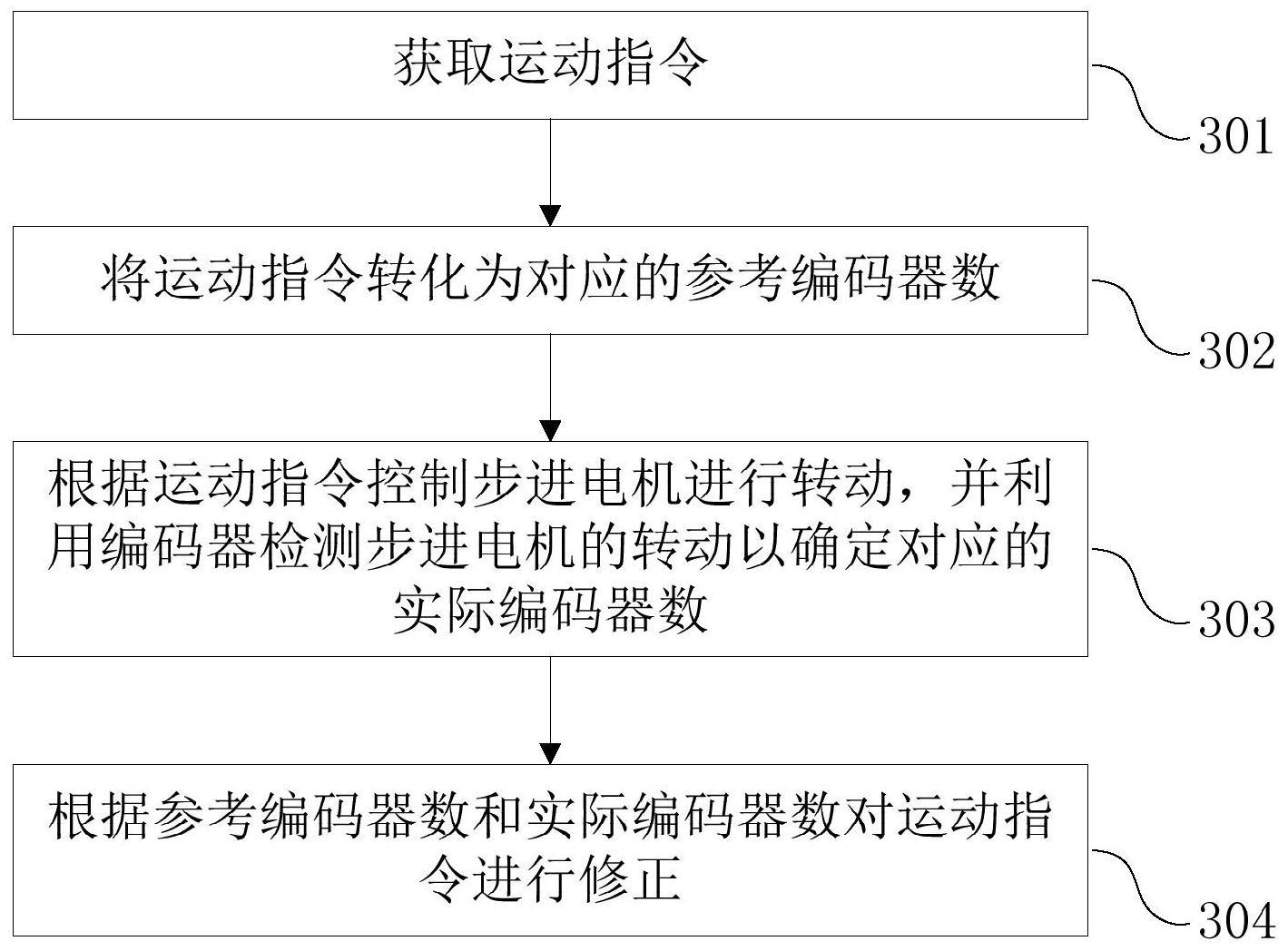
2、为解决上述技术问题,本申请采用的一个技术方案是:提供一种步进电机的误差修正方法,该方法包括:获取运动指令;将运动指令转化为对应的参考编码器数;以及根据运动指令控制步进电机进行转动,并利用编码器检测步进电机的转动以确定对应的实际编码器数;根据参考编码器数和实际编码器数对运动指令进行修正。
3、其中,获取运动指令之后,还包括:根据运动指令确定对应的微步数以及运动方向;将运动指令转化为对应的参考编码器数,包括:将微步数和运动方向转化为对应的参考编码器数;根据运动指令控制步进电机进行转动,包括:根据微步数和运动方向控制步进电机进行转动;根据参考编码器数和实际编码器数对运动指令进行修正,包括:根据参考编码器数和实际编码器数对微步数进行修正。
4、其中,根据运动指令确定对应的微步数以及运动方向,包括:根据运动指令确定对应的步数以及运动方向;根据步数和步进电机的参数确定对应的微步数。
5、其中,根据微步数和运动方向确定对应的参考编码器数,包括:根据微步数和运动方向确定对应的绝对步数;根据绝对步数确定对应的参考编码器数。
6、其中,根据参考编码器数和实际编码器数对微步数进行修正,包括:响应于参考编码器数和实际编码器数的差值小于设定误差范围,对微步数进行误差补偿。
7、其中,对微步数进行误差补偿,包括:确定参考编码器数和实际编码器数的编码器数差值;将编码器差值转化为对应的补偿值;根据补偿值对微步数进行误差补偿。
8、其中,该方法还包括:响应于参考编码器数和实际编码器数的差值大于或等于设定误差范围,进行提醒。
9、其中,该方法还包括:获取复位指令;根据复位指令控制步进电机进行转动复位操作,以及控制编码器进行计数清零操作。
10、为解决上述技术问题,本申请采用的又一个技术方案是:提供一种样本分析装置,该样本分析装置包括:传送带,用于承载并运送试管架;步进电机,连接传送带,用于驱动传送带转动,以带动传送带上的试管架位移;编码器,用于检测步进电机的转动量;控制器,连接步进电机和编码器,用于采用如上述的方法控制步进电机。
11、为解决上述技术问题,本申请采用的又一个技术方案是:提供一种计算机可读存储介质,该计算机可读存储介质中存储有计算机程序,计算机程序在被控制器执行时,用以实现如上述的试管架的位移控制方法。
12、本申请实施例的有益效果是:区别于现有技术,本申请提供的步进电机的误差修正方法包括:获取运动指令;将运动指令转化为对应的参考编码器数;以及根据运动指令控制步进电机进行转动,并利用编码器检测步进电机的转动以确定对应的实际编码器数;根据参考编码器数和实际编码器数对运动指令进行修正。通过上述方式,通过编码器数来进行误差的检测和补偿,相比于现有技术中通过光耦式传感器的方式,提高了误差的检测精度和误差的补偿精度,进一步提高了步进电机的控制精度。
技术特征:
1.一种步进电机的误差修正方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求2所述的方法,其特征在于,
4.根据权利要求2所述的方法,其特征在于,
5.根据权利要求2所述的方法,其特征在于,
6.根据权利要求5所述的方法,其特征在于,
7.根据权利要求5所述的方法,其特征在于,
8.根据权利要求1所述的方法,其特征在于,
9.一种样本分析装置,其特征在于,所述样本分析装置包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序,所述计算机程序在被控制器执行时,用以实现如权利要求1-8任一项所述的方法。
技术总结
本申请公开了一种步进电机的误差修正方法、样本分析装置、存储介质,其中,该步进电机的误差修正方法包括:获取运动指令;将运动指令转化为对应的参考编码器数;以及根据运动指令控制步进电机进行转动,并利用编码器检测步进电机的转动以确定对应的实际编码器数;根据参考编码器数和实际编码器数对运动指令进行修正。通过这样的方式,能够提高步进电机的控制精度。
技术研发人员:唐明,丁辉,廖宁
受保护的技术使用者:深圳市帝迈生物技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!