为双馈风力涡轮发电机提供电网形成控制的系统和方法与流程
1.本公开总体上涉及双馈风力涡轮发电机,并且更具体地涉及用于使用虚拟阻抗提供双馈风力涡轮发电机的电网形成控制的系统和方法。
背景技术:
2.风电被认为是目前可用的最清洁、最环境友好的能量源之一,并且风力涡轮在这方面已得到越来越多的关注。现代风力涡轮典型地包括塔架、发电机、齿轮箱、机舱和一个或多个转子叶片。转子叶片利用已知的翼型件原理捕获风的动能。例如,转子叶片典型地具有翼型件的横截面轮廓,使得在操作期间,空气流过叶片,在侧面之间产生压差。因此,从压力侧朝向吸力侧导向的升力作用在叶片上。升力在主转子轴上生成扭矩,主转子轴典型地齿轮传动到发电机以产生电力。
3.风力涡轮可分为两种类型:定速涡轮和变速涡轮。常规地,变速风力涡轮被控制为连接到功率电网的电流源。换句话说,变速风力涡轮依赖于由锁相环(pll)检测的电网频率作为参考,并且将指定量的电流注入电网中。风力涡轮的常规电流源控制基于以下假设:电网电压波形是具有固定频率和幅值的基本电压波形,并且风电在电网中的渗透率足够低,从而不会对电网电压幅值和频率造成干扰。因此,风力涡轮简单地基于基本电压波形将指定电流注入电网中。然而,随着风电的快速增长,风电在一些电网中的渗透率已经增加到风力涡轮发电机对电网电压和频率有重大影响的程度。当风力涡轮位于弱电网中时,风力涡轮功率波动可导致电网电压的幅值和频率变化增加。这些波动可能不利地影响pll的性能和稳定性以及风力涡轮电流控制。
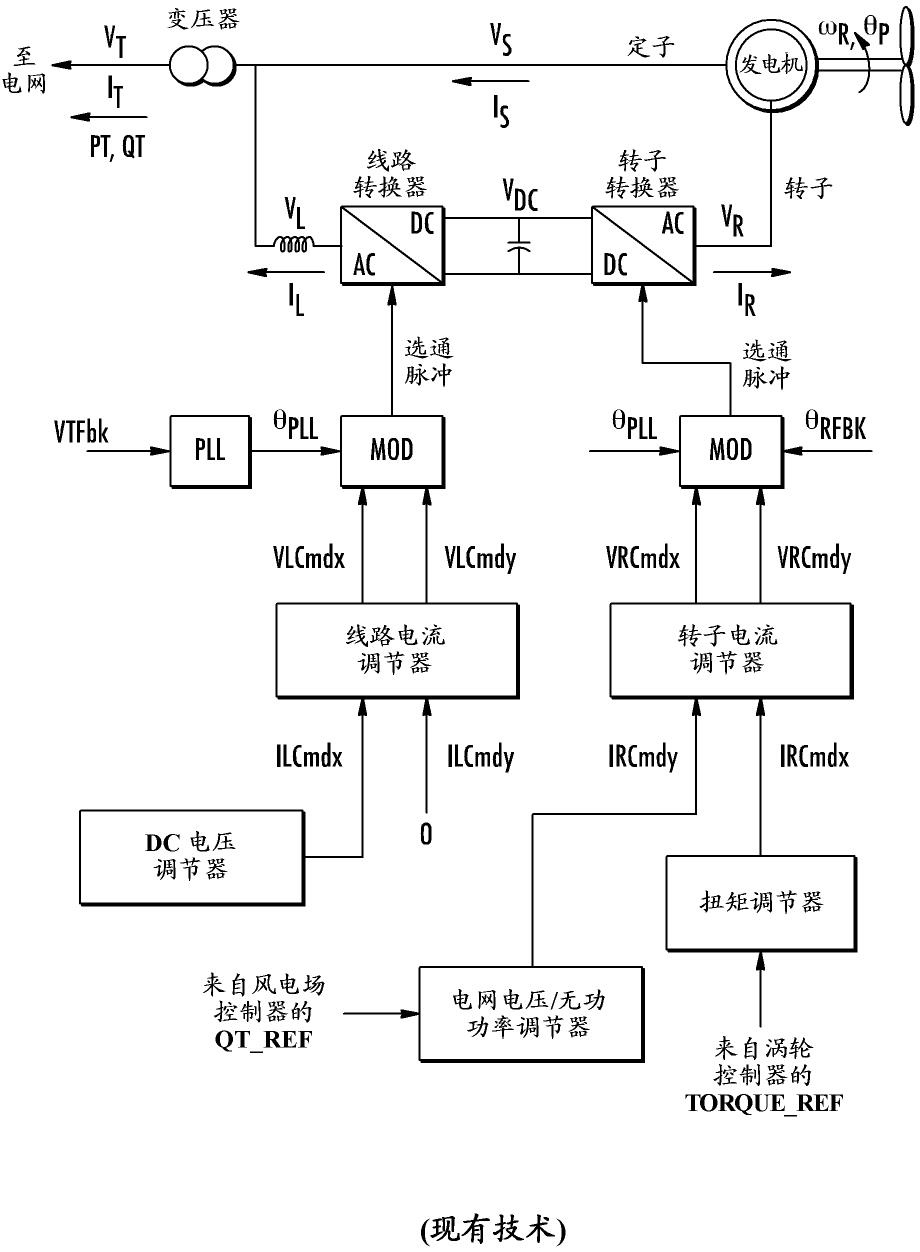
4.此因此,许多现有的异步机(诸如双馈风力涡轮发电机)在“电网跟随”模式下操作。电网跟随型设备利用快速电流调节环路来控制与电网交换的有功和无功功率。更具体地,图1示出了电网跟随双馈风力涡轮发电机的主电路和转换器控制结构的基本元件。如图所示,对于转换器的有功功率基准由能量源调节器(例如,风力涡轮的涡轮控制部分)开发。这作为扭矩基准来传递,该扭矩基准表示在该时刻从能量源可获得的最大功率或者来自更高级别的电网控制器的削减命令中的较小者。转换器控制部然后确定针对电流的有功分量的电流基准,以实现期望的扭矩。因此,双馈风力涡轮发电机包括以导致用于电流的无功分量的命令的方式管理电压和无功功率的功能。然后,宽带宽电流调节器开发用于由转换器将电压施加到系统的命令,使得实际电流紧密跟踪命令。
5.备选地,电网形成(gfm)基于逆变器的资源(ibr)充当阻抗之后的电压源并提供电压源特性,其中电压的角度和幅值被控制以实现由电网所需的调节功能。特别地,gfm ibm的阻抗通常由系统的硬件(诸如电抗器、变压器或旋转电机阻抗)来决定。关于这种结构,电流将根据电网的需求流动,同时转换器有助于为电网建立电压和频率。该特性与基于涡轮的常规发电机相当,所述涡轮驱动同步电机。因此,电网形成源必须包括以下基本功能:(1)支持针对装备的额定值内任何电流(有功和无功两者)的电网电压和频率;(2)通过允许电网电压或频率改变而不是断开装备来防止超出装备电压或电流容量的操作(仅当电压或频
率超出由电网实体建立的边界时才允许断开);(3)对于任何电网配置或负载特性保持稳定,包括供给隔离负载或与其它电网形成源连接,以及在这些配置之间切换;(4)在连接到电网的其它电网形成源之间分担电网的总负载;(5)穿越电网扰动(大扰动和小扰动两者),以及(6)满足要求(1)-(5),而不需要与电网中存在的其它控制系统的快速通信或与电网配置变化相关的外部创建的逻辑信号。
6.实现上述电网形成目标的基本控制结构是在20世纪90年代早期为电池系统开发并经过现场验证的(例如,参见名称为“battery energy storage power conditioning system”的美国专利no. 5,798,633)。全功率转换器风力发电机和太阳能发电机的应用公开在名称为“system and method for control of a grid connected power generating system”的美国专利no. 7,804,184和名称为“controller for controlling a power converter”的美国专利no. 9,270,194中。针对双馈风力涡轮发电机的电网形成控制的应用公开在名称为“system and method for providing grid-forming control for a doubly-feb wind turbine generator”的pct/us2020/013787中。
7.特别地,如图2中所示,电网形成电压源在定子电压上实现,以用于使用定子电压调节器实施针对双馈风力涡轮发电机的电网形成控制。更具体地,如图所示,定子电压调节器50被配置成接收针对定子电压的幅值的较高级别的命令(例如,ei)和针对定子电压的角度相对于锁相环角度的较高级别的命令(例如,δ
it
)。此外,如图所示,定子电压调节器50然后可将(多个)电压命令转换成定子电压命令(例如,vs_cmd_xy),如在52处所示。定子电压调节器50然后可根据定子电压命令和磁化导纳(例如,jbmag 54)确定磁化电流前馈信号(例如,im_ff_xy),磁化导纳可对应于磁化电纳。照此,磁化电流前馈信号被配置成促进定子电压对定子电压命令的快速响应。
8.此外,如图所示,定子电压调节器50还可接收定子电压反馈信号(例如,vs_fbk_xy),并且如在62处所示确定定子电压反馈信号和定子电压命令之间的差。因此,在实施例中,如图所示,定子电压调节器50还可经由比例积分调节器232确定磁化电流校正信号(例如,im_corr_xy)。因此,如在56处所示,定子电压调节器50然后可将磁化电流前馈信号(例如,im_ff_xy)加到来自功率调节器的磁化电流校正信号(im_corr_xy)上,以确定磁化电流命令(例如,im_cmd_xy)。
9.此外,如在58处所示,定子电压调节器50可根据磁化电流命令(例如,im_cmd_xy)和定子电流反馈信号(例如,is_fbk_xy)来确定(多个)转子电流命令(例如,ir_cmd_xy)。因此,在实施例中,测量的定子电流信号可被馈送到转子电流命令中,如在58处所示,以便将定子响应定子电压与一个或多个电网特性基本上脱耦。更具体地,在特定实施例中,如图所示,定子电压调节器50可通过将磁化电流命令添加到所测量的定子电流反馈信号来确定(多个)转子电流命令。此外,如图所示,限制器60可视情况而定对转子电流命令加以限制以遵守(多个)装备额定值。然而,在这样的系统中,电网形成资源的阻抗由系统的硬件决定,特别是用于该实施方式的变压器阻抗。
10.因此,配置成使得有效阻抗可被设置为独立于装备物理特性的参数的系统和方法将是有利的。因此,本公开涉及一种用于在gfm双馈风力涡轮发电机中创建可配置虚拟阻抗以增加在调谐系统的动态方面的灵活性的系统和方法。
技术实现要素:
11.技术方案1. 一种用于提供连接到电网的双馈风力涡轮发电机的电网形成控制的方法,所述双馈风力涡轮发电机具有经由dc链路联接到转子侧转换器的线路侧转换器,所述方法包括:接收与所述双馈风力涡轮发电机的期望总功率输出或总电流输出相关联的至少一个控制信号;确定来自所述线路侧转换器的功率或电流中的至少一个分别对所述双馈风力涡轮发电机的期望总功率输出或总电流输出的贡献;基于来自所述线路侧转换器的功率或电流中的至少一个的贡献和所述至少一个控制信号来确定用于所述双馈风力涡轮发电机的定子的控制命令;和使用所述控制命令来调节所述双馈风力涡轮发电机的定子中的功率或电流中的至少一个。
12.技术方案2. 根据技术方案1所述的方法,其中,与所述双馈风力涡轮发电机的期望总功率输出或总电流输出相关联的至少一个控制信号包括相位角或总功率命令中的至少一个。
13.技术方案3. 根据技术方案2所述的方法,其中,基于来自所述线路侧转换器的功率电流中的至少一个的贡献和所述至少一个控制信号来确定用于所述双馈风力涡轮发电机的定子的控制命令还包括:使用所述总功率命令来调节总功率输出以产生角度命令;和补偿所述角度命令以产生用于所述双馈风力涡轮发电机的定子的控制命令。
14.技术方案4. 根据技术方案3所述的方法,其中,补偿所述角度命令以产生用于所述双馈风力涡轮发电机的定子的控制命令还包括:根据总功率指令和所述双馈风力涡轮发电机的转差率来估计线路侧转换器功率;根据所述线路侧转换器功率和所述双馈风力涡轮发电机的内部阻抗值来估计补偿角度;和使用所述补偿角度来补偿所述角度命令以产生用于所述双馈风力涡轮发电机的定子的控制命令。
15.技术方案5. 根据技术方案4所述的方法,其中,根据所述线路侧转换器功率和所述双馈风力涡轮发电机的内部阻抗值来估计所述补偿角度还包括:接收所述双馈风力涡轮发电机的电频率和转子速度;根据所述电频率和所述转子速度来确定所述双馈风力涡轮发电机的转差率;使用所述转差率来确定所述双馈风力涡轮发电机的定子功率与总功率的比率;和根据所述比率、所述内部阻抗值和所述总功率命令来计算所述补偿角度。
16.技术方案6. 根据技术方案5所述的方法,其中,所述双馈风力涡轮发电机的内部阻抗值包括内部虚拟阻抗值和内部物理阻抗值。
17.技术方案7. 根据技术方案2所述的方法,其中,基于来自所述线路侧转换器的功率或电流中的至少一个的贡献和所述至少一个控制信号来确定用于所述双馈风力涡轮发电机的定子的控制命令还包括:接收指示所述总功率命令的控制信号;
在所述双馈风力涡轮发电机的功率调节器的输入处用所述线路侧转换器功率补偿所述总功率命令以产生定子功率控制命令;使用所述定子功率控制命令来调节所述双馈风力涡轮发电机的定子功率。
18.技术方案8. 根据技术方案4所述的方法,其中,所述内部阻抗值包括在所述双馈风力涡轮发电机的内部的节点处的内部虚拟阻抗值。
19.技术方案9. 根据技术方案8所述的方法,还包括使用电流反馈信号确定所述双馈风力涡轮发电机的内部虚拟阻抗值两端的电压偏差。
20.技术方案10. 根据技术方案9所述的方法,其中,使用所述控制命令来调节所述双馈风力涡轮发电机的定子中的功率或电流中的至少一个还包括:确定所述电压偏差与所述内部电压命令之间的差以获得磁化电压命令;使用所述磁化电压命令计算前馈分量;使用所述前馈分量和微调分量确定磁化电流命令;和使用所述磁化电流命令和至少一个电流反馈信号计算用于双馈风力涡轮发电机的一个或多个转子电流命令。
21.技术方案11. 一种用于提供连接到电网的双馈风力涡轮发电机的电网形成控制的系统,所述双馈风力涡轮发电机具有经由dc链路联接到转子侧转换器的线路侧转换器,所述系统包括:控制器,其包括至少一个处理器,所述至少一个处理器被配置成执行多个操作,所述多个操作包括:接收与所述双馈风力涡轮发电机的期望总功率输出或总电流输出相关联的至少一个控制信号;确定来自所述线路侧转换器的功率或电流中的至少一个分别对所述双馈风力涡轮发电机的期望总功率输出或总电流输出的贡献;基于来自所述线路侧转换器的功率或电流中的至少一个的贡献和所述至少一个控制信号来确定用于所述双馈风力涡轮发电机的定子的控制命令;和使用所述控制命令来调节所述双馈风力涡轮发电机的定子中的功率或电流中的至少一个。
22.技术方案12. 根据技术方案11所述的系统,其中,与所述双馈风力涡轮发电机的期望总功率输出或总电流输出相关联的所述至少一个控制信号包括相位角或总功率命令中的至少一个。
23.技术方案13. 根据技术方案12所述的系统,其中,基于来自所述线路侧转换器的功率或电流中的至少一个的贡献和所述至少一个控制信号来确定用于所述双馈风力涡轮发电机的定子的控制命令还包括:使用所述总功率命令来调节总功率输出以产生角度命令;和补偿所述角度命令以产生用于所述双馈风力涡轮发电机的定子的控制命令。
24.技术方案14. 根据技术方案13所述的系统,其中,补偿所述角度命令以产生用于所述双馈风力涡轮发电机的定子的控制命令还包括:根据总功率指令和所述双馈风力涡轮发电机的转差率来估计线路侧转换器功率;根据所述线路侧转换器功率和所述双馈风力涡轮发电机的内部阻抗值来估计补
偿角度;和使用所述补偿角度来补偿所述角度命令以产生用于所述双馈风力涡轮发电机的定子的控制命令。
25.技术方案15. 根据技术方案14所述的系统,其中,根据所述线路侧转换器功率和所述双馈风力涡轮发电机的内部阻抗值来估计所述补偿角度还包括:接收所述双馈风力涡轮发电机的电频率和转子速度;根据所述电频率和所述转子速度来确定所述双馈风力涡轮发电机的转差率;使用所述转差率来确定所述双馈风力涡轮发电机的定子功率与总功率的比率;和根据所述比率、所述内部阻抗值和所述总功率命令来计算所述补偿角度。
26.技术方案16. 根据技术方案15所述的系统,其中,所述双馈风力涡轮发电机的内部阻抗值包括内部虚拟阻抗值和内部物理阻抗值。
27.技术方案17. 根据技术方案15所述的系统,其中,基于来自所述线路侧转换器的功率或电流中的至少一个的贡献和所述至少一个控制信号来确定用于所述双馈风力涡轮发电机的定子的控制命令还包括:接收指示所述总功率命令的控制信号;在所述双馈风力涡轮发电机的功率调节器的输入处用所述线路侧转换器功率补偿所述总功率命令以产生定子功率控制命令;使用所述定子功率控制命令来调节所述双馈风力涡轮发电机的定子功率。
28.技术方案18. 根据技术方案14所述的系统,其中,所述内部阻抗值包括在所述双馈风力涡轮发电机的内部的节点处的内部虚拟阻抗值。
29.技术方案19. 根据技术方案18所述的系统,还包括使用电流反馈信号确定所述双馈风力涡轮发电机的内部虚拟阻抗值两端的电压偏差。
30.技术方案20. 根据技术方案19所述的系统,其中,使用所述控制命令来调节所述双馈风力涡轮发电机的定子中的功率或电流中的至少一个还包括:确定电压偏差与所述至少一个虚拟阻抗值之间的差以获得磁化电压命令;使用所述磁化电压命令计算前馈分量;使用所述前馈分量和微调分量确定磁化电流命令;和使用所述磁化电流命令和至少一个电流反馈信号计算用于双馈风力涡轮发电机的一个或多个转子电流命令。
31.本发明的方面和优点将在下面的描述中部分地阐述,或者可从描述中显而易见,或者可通过本发明的实践获知。
32.在一个方面,本公开涉及一种用于提供连接到电网的双馈风力涡轮发电机的电网形成控制的方法。双馈风力涡轮发电机具有经由dc链路联接到转子侧转换器的线路侧转换器。该方法包括接收与双馈风力涡轮发电机的期望总功率输出或总电流输出相关联的至少一个控制信号。该方法还包括确定来自线路侧转换器的功率或电流中的至少一个分别对双馈风力涡轮发电机的期望总功率输出或总电流输出的贡献。该方法还包括基于来自线路侧转换器的功率或电流中的至少一个的贡献和至少一个控制信号来确定用于双馈风力涡轮发电机的定子的控制命令。此外,该方法包括使用控制命令来调节双馈风力涡轮发电机的定子中的功率或电流中的至少一个。
33.在实施例中,与双馈风力涡轮发电机的期望总功率输出或总电流输出相关联的(多个)控制信号可包括相位角或总功率命令中的至少一个。
34.在另一个实施例中,基于来自线路侧转换器的功率或电流中的至少一个的贡献和至少一个控制信号来确定用于双馈风力涡轮发电机的定子的控制命令可包括:使用总功率命令来调节总功率输出以产生角度命令;并且补偿角度命令以产生用于双馈风力涡轮发电机的定子的控制命令。
35.在另外的实施例中,补偿角度命令以产生用于双馈风力涡轮发电机的定子的控制命令可包括:根据总功率命令和双馈风力涡轮发电机的转差率来估计线路侧转换器功率;根据线路侧转换器功率和双馈风力涡轮发电机的内部阻抗值来估计补偿角度;以及使用补偿角度来补偿角度命令以产生用于双馈风力涡轮发电机的定子的控制命令。
36.在另一个实施例中,根据线路侧转换器功率和双馈风力涡轮发电机的内部阻抗值来估计补偿角度可包括:接收双馈风力涡轮发电机的电频率和转子速度;根据电频率和转子速度来确定双馈风力涡轮发电机的转差率;使用转差率来确定双馈风力涡轮发电机的定子功率与总功率的比率;以及根据该比率、内部阻抗值和总功率命令来计算补偿角度。
37.在若干实施例中,双馈风力涡轮发电机的内部阻抗值可包括内部虚拟阻抗值和内部物理阻抗值。
38.在特定实施例中,基于来自线路侧转换器的功率或电流中的至少一个的贡献和至少一个控制信号来确定用于双馈风力涡轮发电机的定子的控制命令可包括:接收指示总功率命令的控制信号;在双馈风力涡轮发电机的功率调节器的输入处用线路侧转换器功率补偿总功率命令以产生定子功率控制命令;以及使用定子功率控制命令来调节双馈风力涡轮发电机的定子功率。
39.在又一个实施例中,内部阻抗值可包括在双馈风力涡轮发电机的内部的节点处的内部虚拟阻抗值。因此,在这样的实施例中,该方法还可包括使用电流反馈信号确定双馈风力涡轮发电机的内部虚拟阻抗值两端的电压偏差。
40.在实施例中,使用控制命令来调节双馈风力涡轮发电机的定子中的功率或电流中的至少一个可包括:确定电压偏差与内部电压命令之间的差以获得磁化电压命令;使用磁化电压命令计算前馈分量;使用前馈分量和微调(或调整,即trim)分量确定磁化电流命令;以及使用磁化电流命令和至少一个电流反馈信号计算用于双馈风力涡轮发电机的一个或多个转子电流命令。
41.在另一个方面,本公开涉及一种用于提供连接到电网的双馈风力涡轮发电机的电网形成控制的系统。双馈风力涡轮发电机具有经由dc链路联接到转子侧转换器的线路侧转换器。该系统包括具有至少一个处理器的控制器,该处理器被配置成执行多个操作,包括但不限于:接收与双馈风力涡轮发电机的期望总功率输出或总电流输出相关联的至少一个控制信号;确定来自线路侧转换器的功率或电流中的至少一个分别对双馈风力涡轮发电机的期望总功率输出或总电流输出的贡献;基于来自线路侧转换器的功率或电流中的至少一个的贡献和至少一个控制信号来确定用于双馈风力涡轮发电机的定子的控制命令;以及使用控制命令来调节双馈风力涡轮发电机的定子中的功率或电流中的至少一个。应当理解,该系统还可包括本文描述的附加特征中的任何特征。
42.参考以下描述和所附权利要求书,本发明的这些和其它特征、方面和优点将变得
更好理解。并入并构成本说明书的一部分的附图示出了本发明的实施例,并与描述一起用于解释本发明的原理。
附图说明
43.在参考附图的说明书中阐述了针对本领域普通技术人员的本发明的完整且能够实现的公开内容,包括其最佳模式,在附图中:图1示出了根据常规构造的双馈风力涡轮发电机的单线图,该双馈风力涡轮发电机具有用于电网跟随应用的转换器控制结构;图2示出了根据本公开的双馈风力涡轮发电机的电网形成定子电压调节器的一个实施例的示意图;图3示出了根据本公开的风力涡轮的一个实施例的透视图;图4示出了根据本公开的机舱的一个实施例的简化内部视图;图5示出了适合用于与图3中所示的风力涡轮一起使用的风力涡轮电功率系统的一个实施例的示意图;图6示出了根据本公开的风力涡轮电功率系统的简化等效电路;图7示出了根据本公开的具有多个风力涡轮的风电场的一个实施例的示意图;图8示出了根据本公开的控制器的一个实施例的框图;图9示出了根据本公开的具有用于电网形成应用的转换器控制的双馈风力涡轮发电机的单线图;图10示出了根据本公开的用于提供连接到电网的双馈风力涡轮发电机的电网形成控制的方法的一个实施例的流程图;图11示出了根据本公开的具有虚拟阻抗的电网形成双馈风力涡轮发电机的等效电路;图12示出了根据本公开的用于实施具有所使用的虚拟阻抗值的电网形成双馈风力涡轮发电机的控制逻辑的一个实施例的示意图;以及图13示出了根据本公开的线路侧转换器电压补偿模块的一个实施例的示意图。
具体实施方式
44.现在将详细参考本发明的实施例,其一个或多个示例在附图中被示出。每个示例通过解释本发明、而非限制本发明的方式被提供。事实上,对于本领域技术人员来说将显而易见的是,在不脱离本发明的范围或精神的情况下,可在本发明中进行各种修改和变型。例如,作为一个实施例的部分被示出或描述的特征可与另一个实施例一起使用,以产生又一另外的实施例。因此,旨在本发明覆盖如归入所附权利要求书的范围内的这种修改和变型及其等同物。
45.总体上,本公开涉及用于使用虚拟阻抗为双馈风力涡轮发电机提供电网形成控制的系统和方法。在某些实施例中,本公开的系统和方法涉及在阻抗特性之后合成电压源,其中电压源合成在发电机自身内在虚拟阻抗之后。因此,本公开的系统和方法涉及补偿电网形成控制的电压命令,以考虑线路侧转换器对输出功率的贡献。尽管双馈风力涡轮发电机的硬件结构更复杂(例如,并联线路侧转换器和发电机),但这种方法实现阻抗特性之后的
有效电压源。
46.现在参考附图,图3示出了根据本公开的风力涡轮10的一个实施例的透视图。如图所示,风力涡轮10大体上包括从支撑表面14延伸的塔架12、安装在塔架12上的机舱16以及联接到机舱16的转子18。转子18包括可旋转的毂20和联接到毂20并从毂20向外延伸的至少一个转子叶片22。例如,在图示实施例中,转子18包括三个转子叶片22。然而,在备选实施例中,转子18可包括多于或少于三个转子叶片22。每个转子叶片22可围绕毂20间隔开,以促进使转子18旋转,以使得动能能够从风能转换成可用的机械能,并随后转换成电能。例如,毂20能够可旋转地联接到定位在机舱16内的发电机24(图4),以允许产生电能。
47.风力涡轮10还可包括集中在机舱16内的风力涡轮控制器26。然而,在其它实施例中,控制器26可位于风力涡轮10的任何其它部件内或者风力涡轮10外部的位置处。此外,控制器26可通信地联接到风力涡轮10的任意数量的部件,以便控制这样的部件的操作和/或实施校正或控制动作。照此,控制器26可包括计算机或其它合适的处理单元。因此,在若干实施例中,控制器26可包括合适的计算机可读指令,其当被实施时配置控制器26以执行各种不同的功能,诸如接收、发送和/或执行风力涡轮控制信号。因此,控制器26可大体上配置成控制风力涡轮10的各种操作模式(例如,启动或关闭序列)、风力涡轮的降级或升级和/或风力涡轮10的各个部件。
48.现在参考图4,示出了图1中所示的风力涡轮10的机舱16的一个实施例的简化内部视图。如图所示,发电机24可设置在机舱16内并支撑在底板46的顶部上。一般来说,发电机24可联接到转子18,用于从由转子18生成的旋转能量产生电功率。例如,如图示实施例中所示,转子18可包括转子轴34,转子轴联接到毂20用于与其一起旋转。转子轴34可继而通过齿轮箱38可旋转地联接到发电机24的发电机轴36。如通常理解的,响应于转子叶片22和毂20的旋转,转子轴34可向齿轮箱38提供低速、高扭矩输入。齿轮箱38然后可被配置成将低速、高扭矩输入转换成高速、低扭矩输出,以驱动发电机轴36和因此发电机24。
49.风力涡轮10还可包括通信地联接到风力涡轮控制器26的一个或多个变桨驱动机构32,其中每个(多个)桨距调节机构32被配置成使变桨轴承40旋转,并且因此使各个(多个)转子叶片22围绕其相应的变桨轴线28旋转。此外,如图所示,风力涡轮10可包括一个或多个偏航驱动机构42,偏航驱动机构被配置成改变机舱16相对于风的角度(例如,通过接合布置在风力涡轮10的机舱16和塔架12之间的风力涡轮10的偏航轴承44)。
50.此外,风力涡轮10还可包括一个或多个传感器66、68,用于监测风力涡轮10的各种风况。例如,可诸如通过使用合适的天气传感器66测量来风方向30、风速或风力涡轮10附近的任何其它合适的风况。合适的天气传感器可包括例如光探测和测距(“lidar”)设备、声波探测和测距(“sodar”)设备、风速计、风向标、气压计、雷达设备(诸如多普勒雷达设备)或本领域现在已知或以后开发的可提供风向信息的任何其它感测设备。还有另外的传感器68可用来测量风力涡轮10的附加的操作参数,诸如电压、电流、振动等,如本文所述。
51.现在参考图5和图6,根据本公开的各方面,示出了风力涡轮功率系统100的某些实施例的示意图。特别地,图5示出了适合用于与图3中所示风力涡轮一起使用的风力涡轮电功率系统100的一个实施例的示意图,而图6示出了风力涡轮电功率系统100的简化等效电路。尽管本公开将在本文中大体上参照图5和图6中所示的风力涡轮电功率系统100进行描述,但是使用本文提供的公开内容的本领域普通技术人员应当理解,本公开的各方面也可
应用于其它功率生成系统,并且如上所提及的那样,本发明不限于风力涡轮系统。
52.在图5的实施例中并且如所提及的,风力涡轮10的转子18(图3)可任选地联接到齿轮箱38,该齿轮箱38继而联接到发电机102,发电机可为如本文所述的双馈感应发电机(dfig)。如图5和图6中所示,dfig 102可连接到定子总线104。此外,如图5和图6中所示,功率转换器106可经由转子总线108连接到dfig 102,并且经由线路侧总线110连接到定子总线104。照此,定子总线104可从dfig 102的定子提供输出多相功率(例如,三相功率),并且转子总线108可从dfig 102的转子提供输出多相功率(例如,三相功率)。功率转换器106还可包括转子侧转换器(rsc)112和线路侧转换器(lsc)114。dfig 102经由转子总线108联接到rsc 112。另外,rsc 112经由dc链路116联接到lsc 114,dc链路电容器118横跨该dc链路。lsc 114继而联接到线路侧总线110。功率转换器106也可包括如图6中所示的动态制动器105。
53.rsc 112和lsc 114可被配置用于在使用一个或多个开关设备(诸如绝缘栅双极晶体管(igbt)开关元件)的三相脉宽调制(pwm)布置中的正常操作模式。此外,如图5中所示,功率转换器106可联接到转换器控制器120,以便控制rsc 112和lsc 114的操作,如本文所述。应当注意,转换器控制器120可被配置为功率转换器106和涡轮控制器26之间的接口,并且可包括任何数量的控制设备。
54.在典型的配置中,还可包括各种线路接触器和电路断路器,包括例如电网断路器122,以便在连接到诸如电网124之类的负载和从负载断开连接期间如针对dfig 102的正常操作而必要的那样使各种构件隔离。例如,系统电路断路器126可将系统总线128联接到变压器130,变压器可经由电网断路器122联接到电网124。在备选实施例中,熔断器可代替电路断路器中的一些或全部。
55.在操作中,通过旋转转子18在dfig 102处生成的交流功率经由由通过定子总线104和转子总线108限定的双路径提供至电网124。在转子总线侧108上,正弦多相(例如,三相)交流(ac)功率被提供至功率转换器106。rsc 112将从转子总线108提供的ac功率转换成直流(dc)功率,并将dc功率提供至dc链路116。如通常所理解的,在rsc 112的桥电路中使用的开关元件(例如,igbt)可被调制,以将从转子总线108提供的ac功率转换成适合于dc链路116的dc功率。
56.此外,lsc 114将dc链路116上的dc功率转换成适合于电网124的ac输出功率。特别地,lsc 114的桥电路中使用的开关元件(例如,igbt)可被调制,以将dc链路116上的dc功率转换成线路侧总线110上的ac功率。来自功率转换器106的ac功率可与来自dfig 102的定子的功率结合,以提供具有基本上维持在电网124的频率下的频率(例如,50hz或60hz)的多相功率(例如,三相功率)。
57.另外,如图5中所示,各种电路断路器和开关,诸如电网断路器122、系统断路器126、定子同步开关132、转换器断路器134和线路接触器136可被包括在风力涡轮功率系统100中,以连接或断开对应的总线,例如,当电流过大并且可能损坏风力涡轮功率系统100的部件或出于其它操作考虑时。在风力涡轮功率系统100中还可包括附加的保护部件。
58.此外,功率转换器106可经由转换器控制器120从例如本地控制系统176接收控制信号。控制信号尤其可基于风力涡轮功率系统100的感测到的状态或操作特性。典型地,控制信号提供对功率转换器106的操作的控制。例如,以dfig 102的被感测的速度形式的反馈
可用于控制来自转子总线108的输出功率的转换,以维持适当且平衡的多相(例如,三相)功率供应。来自其它传感器的其它反馈也可由(多个)控制器120、26使用来控制功率转换器106,包括例如定子和转子总线电压和电流反馈。使用各种形式的反馈信息,可生成开关控制信号(例如,用于igbt的栅极定时命令)、定子同步控制信号和电路断路器信号。
59.功率转换器106还针对例如在毂20和转子叶片22处的风速中的变化来补偿或调节来自转子的三相功率的频率。因此,机械和电气转子频率脱耦,并且基本上独立于机械转子速度地促进电气定子和转子频率匹配。
60.在一些状态下,功率转换器106的双向特性以及具体地lsc 114和rsc 112的双向特性促进将生成的电功率中的至少一些反馈到发电机转子中。更具体地,电功率可从定子总线104传输到线路侧总线110,并且随后通过线路接触器136并传输到功率转换器106(具体地lsc 114,其充当整流器并将正弦三相ac功率整流成dc功率)中。dc功率被传输到dc链路116中。电容器118通过促进减轻有时与三相ac整流相关联的dc纹波而促进减轻dc链路电压振幅变化。
61.dc功率随后被传输到rsc 112,其通过调节电压、电流和频率将dc电功率转换成三相正弦ac电功率。该转换经由转换器控制器120被控制和被监测。转换后的ac功率经由转子总线108从rsc 112传输到发电机转子。以这种方式,通过控制转子电流和电压来促进发电机无功功率控制。
62.特别地参考图6,如所提及的,示出了风力涡轮功率系统100的单线电路图。特别地,如图所示,由风力涡轮功率系统100生成的功率(p
t
)是来自发电机定子(ps)和lsc 114(p
l
)的功率之和,由下面的方程(1)给出:p
t = p
s + p
l 方程(1)此外,来自lsc 114(p
l
)的功率可通过假设来自dfig 102的转子(pr)的所有功率传递到lsc 114来近似,由下面的方程(2)给出:p
l ≈
ꢀ‑
p
r =
ꢀ−
转差率
ꢀ∗ꢀ
ps
ꢀꢀ
方程(2)其中,转差率由下面提供的方程(3)的关系定义:转差率 = ω
elec
−
ω
rot
/ω
elec 方程(3)其中,ω
elec
是风力涡轮功率系统100的电频率,并且ω
rot
是风力涡轮功率系统100的转子18的转子速度。
63.因此,在实施例中,通过组合前述关系,定子功率(ps)与总功率(p
t
)的比率可使用下面的方程(4)来表达:ps/p
t = 1/(1
−
转差率)
ꢀꢀ
方程(4)仍在另外的图6中所示的关系,诸如电压(v)、电流(i)和阻抗(x)等将在本文中更详细地描述。
64.现在参考图7,本文所述的风力涡轮功率系统100可为风电场150的一部分。如图所示,风电场150可包括多个风力涡轮152(包括上述风力涡轮10)和总场级控制器156。例如,如在图示实施例中所示,风电场150包括十二个风力涡轮,包括风力涡轮10。然而,在其它实施例中,风电场150可包括任何其它数量的风力涡轮,诸如少于十二个风力涡轮或多于十二个风力涡轮。在一个实施例中,多个风力涡轮152的涡轮控制器例如通过有线连接通信地联接到场级控制器156,诸如通过经由合适的通信链路154(例如,合适的线缆)连接涡轮控制
器26。备选地,涡轮控制器可通过无线连接通信地联接到场级控制器156,诸如通过使用本领域已知的任何合适的无线通信协议。在另外的实施例中,场级控制器156被配置成向各种风力涡轮152发送和从各种风力涡轮152接收控制信号,诸如例如横跨风电场150的风力涡轮52分配有功和/或无功功率需求。
65.现在参考图8,示出了根据本公开的示例方面的可包括在控制器(诸如本文描述的涡轮控制器26、转换器控制器120和/或场级控制器156中的任何一个)内的合适部件的一个实施例的框图。如图所示,控制器可包括一个或多个处理器158、计算机或其它合适的处理单元和相关联的(多个)存储器设备160,存储器设备可包括合适的计算机可读指令,其当被实施时配置控制器以执行各种不同的功能,诸如接收、发送和/或执行风力涡轮控制信号(例如,执行本文所公开的方法、步骤、计算等)。
66.如本文所用,术语“处理器”不仅指在本领域中被称为包含在计算机中的集成电路,还指控制器、微控制器、微型计算机、可编程逻辑控制器(plc)、专用集成电路和其它可编程电路。另外,(多个)存储器设备60大体上可包括(多个)存储器元件,包括但不限于计算机可读介质(例如,随机存取存储器(ram))、计算机可读非易失性介质(例如,闪存存储器)、软盘、致密盘只读存储器(cd-rom)、磁光盘(mod)、数字多功能盘(dvd)和/或其它合适的存储器元件。
67.(多个)这样的存储器设备160可大体上被配置成存储合适的计算机可读指令,其当由(多个)处理器158实施时配置控制器以执行本文所述的各种功能。另外,控制器还可包括通信接口162,以促进控制器和风力涡轮10的各种部件之间的通信。接口可包括一个或多个电路、终端、引脚、触点、导体或用于发送和接收控制信号的其它部件。此外,控制器可包括传感器接口164(例如,一个或多个模数转换器),以允许从传感器66、68传输的信号被转换成可被(多个)处理器58理解和处理的信号。
68.现在参考图9,示出了根据本公开的用于提供风力涡轮的双馈发电机的电网形成控制的系统200的一个实施例的示意图。更具体地,如图所示,系统200可包括本文所述的图5的相同特征中的许多特征,其中具有相同附图标记的部件表示同样的部件。此外,如图所示,系统200可包括用于控制线路侧转换器的控制结构,该控制结构类似于图5中所示的控制结构。
69.此外,如图所示,lsc控制结构可包括dc调节器212和线路电流调节器214。dc调节器212被配置成生成用于线路电流调节器214的线路侧电流命令。线路电流调节器214然后生成用于调制器218的线路侧电压命令。调制器218还接收来自锁相环216的输出(例如,锁相环角度),以生成用于lsc 114的一个或多个选通脉冲。锁相环216典型地使用电压反馈信号生成其输出。
70.此外,如图所示,系统200还可包括控制结构用于使用电网形成特性来控制rsc 112。特别地,如图9中所示,系统200可包括定子电压调节器206用于提供这种电网形成特性。此外,如图所示,系统200可包括电网电压/var调节器202、惯性功率调节器204、转子电流调节器208和调制器210。
71.在实施例中,电网电压/var调节器202从场级控制器156接收电压基准(例如,vt_ref)并生成定子电压幅值命令(例如,vs_mag_cmd),而惯性功率调节器从涡轮控制器26接收功率基准并生成定子电压角度命令(例如,vs_angle_cmd)。更具体地,在实施例中,如图
所示,定子电压调节器206根据双馈发电机120的定子电压幅值命令、定子电压角度命令和/或定子电流反馈信号240来确定一个或多个转子电流命令(例如,ircmdy和ircmdx)。应当理解,定子反馈电流240是外部连接的功率系统(即电网)的特性的强指标。因此,定子反馈电流240可用作反馈信号,以将定子电压对变化的响应与电网的性质脱耦。与定子电压调节器206相关的另外的细节进一步解释和描述于名称为“system and method for providing grid-forming control for a doubly-feb wind turbine generator”的pct/us2020/013787中,该专利通过引用以其整体并入本文中。
72.如所提及的,关于电网形成控制,当存在电网扰动时,电流迅速变化。此外,控制动作是渐进的,以恢复由更高级别的控制命令的稳态操作条件。电流变化量与电路的总阻抗负相关。然而,如果电流超过极限,那么控制快速响应以迫使电流处于极限内。当应用于由许多其它类似系统组成的电网时,这种强烈的非线性可导致无秩序行为。备选地,如果电流变化太小,那么电网形成系统将不会和其本可以的一样多地贡献于支持电网。
73.因此,图10至图13总体上描述了用于使用至少一个虚拟阻抗来提供诸如dfig 102的双馈风力涡轮发电机的电网形成控制的系统400和方法300。特别地参考图10,示出了根据本公开的使用至少一个虚拟阻抗来提供dfig 102的电网形成控制的方法300的一个实施例的流程图。应当理解,所公开的方法300可利用具有任何合适配置的任何合适的双馈风力涡轮发电机来实施。此外,尽管为了说明和讨论的目的,图10描绘了以特定顺序执行的步骤,但是本文讨论的方法不限于任何特定顺序或布置。使用本文所提供的公开内容,本领域技术人员将理解,在不偏离本公开的范围的情况下,本文公开的方法的各种步骤可以各种方式被省略、重新布置、组合和/或修改。
74.如在(302)所示,方法300包括接收与dfig 102的期望总功率输出或总电流输出相关联的至少一个控制信号。例如,在实施例中,与dfig 102的期望总功率输出或总电流输出相关联的(多个)控制信号可包括相位角或总功率命令。如在(304)所示,方法300包括确定来自lsc 114的功率或电流中的至少一个分别对dfig 102的期望总功率输出或总电流输出的贡献。如在(306)所示,方法300包括基于来自lsc 114的功率或电流中的至少一个的贡献和(多个)控制信号来确定用于dfig 102的定子的控制命令。如在(308)所示,方法300包括使用控制命令来调节dfig 102的定子中的功率或电流中的至少一个。
75.参照图11和图12,可更好地理解图10的方法300。更具体地,如图11所示,示出了根据本公开的具有虚拟阻抗的电网形成dfig 102的等效电路。特别地,假想地指示的部件代表“虚拟”部件,因为这样的部件不是风力涡轮功率系统100的实际硬件,而是使用资源的软件来提供或模拟的。此外,参照图6和图11,具有相同参考变量的部件表示同样的变量。因此,如图11中所示,等效电路可包括(多个)虚拟阻抗值,诸如在双馈风力涡轮发电机102内部的节点处的内部虚拟阻抗值xd和/或在dfig 102外部的节点处的外部虚拟阻抗值xg。
76.因此,在某些实施例中,可实施两个虚拟阻抗,每个虚拟阻抗具有与系统的有功功率动态相关的特定目的。例如,在实施例中,内部虚拟阻抗可允许针对外部网络角度中的变化来调谐风力涡轮功率系统100的有功功率输出。在另一个实施例中,外部虚拟阻抗可允许通过锁相环针对电网形成资源的有功功率输出中的变化来调谐电网角度估计。在这样的实施例中,多个自由度允许利用各种硬件类型以及各种类型的外部网络来配置和调谐用于电网形成转换器控制的有功功率动态。
77.如本文所用,可调谐的“虚拟”阻抗值通常是指可被系统模拟的阻抗行为,而不是由特定部件(诸如电感器)提供的阻抗。因此,虚拟或有效阻抗可为由应用场景的研究确定的固定值。备选地,虚拟阻抗可为变量,例如由适应测量的电网条件的控制逻辑确定的变量。在一个实施例中,作为示例,例如在电网故障期间,可使用更大的有效阻抗来降低与快速上升到限流区域相关联的极端非线性。因此,在故障清除后,较大的虚拟阻抗允许浪涌电流处于极限内。在电网故障之后,随着电网电压恢复,虚拟阻抗可随后降低,使得转换器有助于支持电网,同时在其线性区域内操作。此外,在实施例中,较低的有效阻抗可用于改善针对较温和事件提供给电网的支持。
78.此外,如图11中所示,用于实施本公开的电压源反映在dfig 102内的合成电压(ed)。此外,在实施例中,与合成电压466串联的内部阻抗(例如,参见图11和图13中的ed)表示dfig 102的定子漏电抗(xs)和内部虚拟阻抗(xd)的组合,如下面在方程(5)中所阐述,其中is是定子电流,并且vs是定子电压:v
s = edꢀ–ꢀ
j*(xs + xd)*is 方程(5)描述图11中物理电路的磁化电压vm的电学方程由下面的方程(6)给出:v
m = v
s + jxs*is
ꢀꢀ
方程(6)使用该物理关系和方程(5),虚拟阻抗之后的合成电网形成电压可使用下面的方程(7)与物理磁化电压vm相关:v
m = edꢀ‑ꢀ
j*xd*is 方程(7)图11中的电压vs和v
t
分别表示定子电压和终端电压。此外,x
t
表示变压器电抗,i
t
是dfig 102中的lsc电流i
l
和定子电流is的总和,并且xg是外部虚拟阻抗。
79.现在参考图12,示出了根据本公开的用于实施具有所使用的虚拟阻抗值的电网形成dfig 102的系统400的一个实施例的示意图。特别地,如图所示,系统200被配置成接收dfig 102的一个或多个控制信号。例如,在实施例中,如图12中所示,(多个)控制信号可包括相位角δ
pg
或总功率命令e
p
,例如相对于锁相环用于待被合成在阻抗x
term
之后的电压。更具体地,如下所示,阻抗x
term
可由下面的方程(8)定义:x
term = x
g + x
d + x
s + x
t 方程(8)因此,如图所示,系统400也可包括lsc电压补偿模块402,用于确定来自lsc 114的功率或电流中的至少一个分别对dfig 102的期望总功率输出或总电流输出的贡献。例如,在实施例中,如图12中所示,lsc电压补偿模块402被配置成基于来自lsc 114的功率或电流中的至少一个的贡献和(多个)控制信号来生成合成电压ed和相位角δ
dg
,该合成电压ed和相位角δ
dg
可用于经由框404确定用于dfig 102的定子的控制命令420(ed_cmd_xy)。
80.仍然参考图12,磁化电压命令422(vm_cmd_xy)然后可使用上面的方程(7)从控制命令420(ed_cmd_xy)计算。转子电流命令428(ir_cmd_xy)然后可基于dfig 102的估计磁化电抗和微调分量(im_corr_xy)从前馈项424(im_ff_xy)计算,类似于关于图2描述的方法。
81.现在参考图13,示出了根据本公开的lsc电压补偿模块402的一个实施方式的示意图。在图示示例中,lsc电压补偿模块402假设lsc 114不注入无功功率/电流。然而,在备选实施例中,可修改lsc电压补偿模块402,以通过补偿电压幅值而不是角度命令来考虑这些影响。另外,可进一步修改角度补偿方法,以考虑动态制动元件(例如,图6的动态制动器105)的功率损失或操作。
82.如图所示,图12中针对控制的输入电压命令反映电抗x
term
之后的具有相位角448 δ
pg
的电压命令450 e
p
。相关的功率方程给出为下面的方程(9):p
t = (e
p
*vg/x
term
) * sin(δ
pg
) ≈ (e
p
*vg/x
term
) * (δ
pg
)方程(9)如上所阐述的那样,方程(9)考虑通过电抗x
term
连接在一起的两个节点之间的功率流。然而,在dfig 102的硬件结构中,并非来自系统的功率流中的全部都通过x
term
的所有元件。另外,通过系统的功率流取决于dfig 102的操作速度,因此,合成在dfig 102内以实现特定功率流的电压取决于dfig 102的操作速度。为了补偿这种速度依赖性,lsc电压补偿模块402被配置成仅考虑来自lsc 114的有功功率流来估计lsc补偿角(δ
lcomp
)。例如,如图13中所示,lsc电压补偿模块402还可接收dfig 102的电频率ω
elec 442和转子速度ω
rot 444。如在452处所示,lsc电压补偿模块402然后可根据电频率442和转子速度444来确定dfig 102的转差率454。此外,如图所示,lsc电压补偿模块402还可经由一个或多个滤波器456对转差率454进行滤波。此外,如在方框458处所示,lsc电压补偿模块402可确定dfig 102的定子功率与总功率的比率(即psp
tot
)。此外,可使用该比率和总功率来估计lsc功率,如由下面的方程(10)所示:p
l =
ꢀ‑
p
t
*( psp
tot
ꢀ–ꢀ
1)方程(10)此外,如在方框460处所示,lsc电压补偿模块402然后可根据比率、内部阻抗值和/或功率基准446(pref)来计算补偿角度δ
lcomp 462,例如使用下面的方程(10):δ
lcomp ≈
ꢀ‑
p
l * (x
s + xd)/(vsed) = p
ref * (((psp
tot-1)(x
s + xd))/vsed) ≈ p
t * ((psp
tot-1)(x
s + xd))方程(11)其中,ps表示定子功率,p
ref
表示总功率基准,并且x
s + xd表示dfig 102的内部阻抗值,其中xd是dfig 102的内部虚拟阻抗值,并且xs是内部物理阻抗值。此外,在这样的实施例中,lsc功率通过方程(10)中的关系嵌入方程(11)中。
83.因此,lsc补偿角度δ
lcomp
认为来自lsc 114的功率不流过发电机阻抗(例如,x
s + xd)。因此,发电机电压的内角464(δ
dg
)与角度命令相关,如下面的方程(10)中所示:δ
dg ≈ δ
pg + δ
lcomp
方程(12)再次参考图12,如在406处所示,系统400还可使用电流反馈信号430(is_fbk_xy)来确定dfig 102的内部虚拟阻抗值两端的电压偏差。因此,如在408处所示,系统400可根据控制命令420(ed_cmd_xy)和电压偏差来确定磁化电压命令422(vm_cmd_xy)。
84.再次参考图10,如在(308)所示,方法300然后包括至少根据控制命令420(ed_cmd_xy)确定用于dfig 102的控制信号。更特别地,如在图12的410处所示,系统400可使用磁化电压命令422(vm_cmd_xy)来计算前馈分量424(im_ff_xy)。如所提及的,系统400然后可使用前馈分量424(im_ff_xy)和磁化电流校正信号432(im_corr_xy)(在本文中也可称为微调分量)来确定磁化电流命令426(im_cmd_xy)。特别地,如图所示,微调分量432(im_corr_xy)可为风力涡轮功率系统100的功率调节器414的输出。
85.特别地,如图所示,系统400可接收定子电压反馈信号436(vs_fbk_xy)并且/或者定子电流反馈信号438(is_fbk_xy)可将反馈信号相加在一起以确定磁化电压反馈信号440(vm_fbk_xy)。因此,在实施例中,如图所示,系统400可经由功率调节器414确定磁化电流校
正信号432(im_corr_xy)。因此,如在412处所示,系统400然后可将磁化电流前馈信号424(im_ff_xy)加到来自功率调节器414的磁化电流校正信号432(im_corr_xy)上,以确定磁化电流命令426(im_cmd_xy)。
86.此外,如在416处所示,系统400然后可使用磁化电流命令426(im_cmd_xy)和至少一个电流反馈信号434(is_fbk_xy)来计算用于dfig 102的一个或多个转子电流命令428(ir_cmd_xy)。此外,如图所示,系统400还可包括限制器418,用于使用上限和下限来限制一个或多个转子电流命令。
87.本书面描述使用示例来公开包括最佳模式的本发明,并且还使得本领域的任何技术人员能够实践本发明,包括制造和使用任何设备或系统以及执行任何并入的方法。本发明的可专利性范围由权利要求书限定,并且可包括本领域技术人员想到的其它示例。如果这些其它示例包括不异于权利要求书的字面语言的结构要素,或者如果它们包括与权利要求书的字面语言具有非实质性差异的等效结构要素,则这些其它示例旨在处于权利要求书的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1