一种基于正弦曲线拟合观测器的PMSM相电流重构方法
一种基于正弦曲线拟合观测器的pmsm相电流重构方法
技术领域
1.本发明属于永磁同步电动机相电流重构技术领域,特别涉及一种基于正弦拟合观测器的相电流重构方法,以减小永磁同步电动机相电流检测的硬件成本。
背景技术:
2.永磁同步电机(permanent magnet synchronous machines,pmsm)作为一种典型的伺服电机,具有结构简单、功率密度高、调速范围宽、可靠性好等优点,被广泛应用于工业机器人、新能源汽车和航空航天等领域。
3.在pmsm控制系统中,需要实时的检测电机各相电流,用于电流闭环控制。目前,检测相电流最基本的方法有三种:第一种方法是在电机三相上串霍尔电流传感器来检测相电流;第二种方法是在电机三相上串电阻检测相电流;第三种方法是在三相逆变器的下桥臂串电阻检测相电流。这三种方法各有优缺点:第一种方法在任意时刻都可以检测到相电流,并且不会产生压降,但至少需要两个霍尔电流传感器,硬件成本很高;第二种方法在任意时刻均可检测到相电流,至少需要两个检测电阻,电阻成本较低,但需要添加隔离器件;第三种方法仅在下桥臂导通的时候才能检测到相电流,至少需要两个检测电阻,不需要添加隔离器件。
4.针对上述电流检测方法的优缺点,本发明利用一个母线电阻来检测母线电流,并利用正弦拟合观测器将母线电流重构为相电流,该方法仅需要一个母线电阻,成本较低,损耗较小,在任意时刻均可以通过检测母线电流来重构相电流。
技术实现要素:
5.本发明提供了一种基于正弦拟合观测器的相电流重构方法来降低pmsm相电流检测的成本,下面将简单概括本发明的技术方案。
6.正弦拟合观测器的核心部分是正弦振荡器,正弦振荡器由两个相互正交的状态变量构成,分别是sinωt和cosωt,其中ω为电角速度。将sinωt作为两相静止坐标系的α轴电流信号,将cosωt作为两相静止坐标系的β轴电流信号,然后利用逆clark变换将αβ轴的两相电流信号变换为abc轴的三相电流信号,将此三相电流信号作为重构的三相电流。为了校正重构的三相电流幅值,需要进行状态反馈,状态反馈是误差反馈增益矩阵与三相电流误差信号的乘积,误差反馈增益矩阵根据系统的渐近稳定性得出,三相电流误差由采样的三相电流与重构的三相电流相减得出,然后将状态反馈连接至输入端进行状态校正。下面将介绍基于正弦曲线拟合观测器pmsm相电流重构方法的具体步骤:
7.步骤1:通过开关状态和母线电流确定采样的相电流。在母线电流信号中包含着三相电流信息,根据逆变器的开关状态可以从母线电流信号中提取出各相离散的相电流信息,将这些离散的相电流信息作为采样的三相电流,用于计算三相电流误差,以实现正弦曲线拟合观测器的状态反馈。
8.步骤2:建立正弦振荡器的状态方程。正弦振荡器是正弦曲线拟合观测器的核心部
分,正弦振荡器的两个状态变量x1和x2分别是sinωt和cosωt,两个状态变量相互正交,分别作为αβ轴的两个电流信号。
9.步骤3:利用逆clark变换将x1和x2变换为ia、ib和ic。期望的状态输出是重构的三相电流信号,因此需要利用逆clark变换将正弦振荡器输出的状态x1和x2变为重构的三相电流信号ia、ib和ic。
10.步骤4:在正弦振荡器的基础上添加状态反馈,校正由正弦振荡器输出的三相电流幅值。
11.步骤5:求解三相电流的误差矩阵。将采样的三相电流与重构的三相电流相减,得出三相电流的误差矩阵。
12.步骤6:求解误差反馈增益矩阵。状态反馈是误差反馈增益矩阵与三相电流误差矩阵的乘积,由于误差反馈增益矩阵是未知的,所以必须根据观测器的渐近稳定性来求解误差反馈增益矩阵。由于一个开关状态和一个母线电流仅能确定一相电流,进而计算出此相的电流误差,而其余两相电流误差不能确定,因此为了简化误差反馈增益矩阵的求解,可将其余两相电流误差设为0。
13.步骤7:根据误差反馈增益矩阵,构建完整的正弦曲线拟合观测器。误差反馈增益矩阵与电流误差矩阵的乘积构成状态反馈部分,再加上正弦振荡器部分构成了整个正弦曲线拟合观测器。
14.本发明的有益效果:
15.(1)硬件上仅在低压侧使用一个母线电阻,不需要添加隔离器件,正弦曲线拟合观测器以软件的形式实现,极大地降低了硬件成本低;
16.(2)正弦曲线拟合观测器对给定转速和负载转矩的变化不敏感,在不同转速或负载转矩条件下依然可以准确的重构出三相电流;
17.(3)正弦曲线拟合观测器不受控制器、逆变器和pmsm参数的影响,可适用于不同的pmsm应用场合。
附图说明
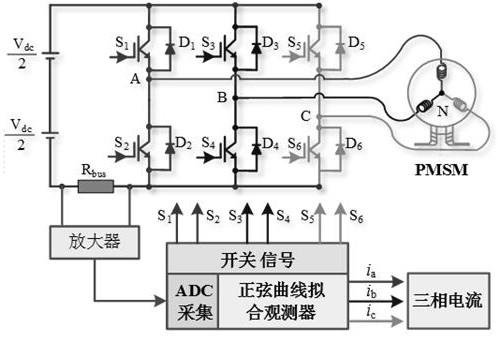
18.图1为正弦曲线拟合观测器三相电流重构的整体结构图。
19.图2为开关状态、母线电流与三相电流之间的关系图。
20.图3为正弦振荡器的结构图。
21.图4为正弦曲线拟合观测器的结构图。
22.图5为实际的三相电流波形。
23.图6为重构的三相电流波形。
24.图7为三相实际电流与重构电流之间的误差波形。
具体实施方式
25.接下来将结合实施例程和附图对本发明进行详细说明。
26.本发明涉及的正弦曲线拟合观测器三相电流重构的整体结构如附图1所示,图中的s
x
(x=1,2,...,6)为六个开关信号,d
x
(x=1,2,...,6)为续流二极管,v
dc
为母线电压,r
bus
为母线电流检测电阻,为减小该电阻的损耗,该电阻阻值应根据母线电流的范围和adc
的量程选取,一般为mω级。母线电流检测电阻很小,其两端的压降也很小,因此需要经过放大器放大,然后再经adc采样,采样出的数据需要根据放大器放大倍数和母线检测电阻值计算出实际的母线电流。利用采样的母线电流和开关状态即可确定对应的一相电流,然后经过正弦曲线拟合观测器求出观测的三相电流。
27.结合附图的具体实施步骤将在以下说明。
28.步骤1:根据附图1和附图2确定开关状态、母线电流与三相电流之间的关系。附图2中的上半部分为电流信号,包括a相电流ia、b相电流ib、c相电流ic和母线电流i
dc
,下半部分为开关状态,开关状态的计算方法为
29.s=s1+2s3+4s5ꢀꢀꢀ
(1)
30.式中,s为开关状态,s1、s3和s5分别为逆变器上桥臂的开关信号。从附图1和附图2中可以清楚的确定开关状态、母线电流和相电流之间的关系,如表1所示,具体的逻辑表达式为
[0031][0032]
表1开关状态、母线电流和相电流之间的关系
[0033][0034]
步骤2:建立正弦观测器的状态方程。正弦曲线拟合观测器的核心部分是正弦振荡器,其结构如附图3所示。正弦振荡器的状态x1和x2分别是sinωt和cosωt,其微分方程为
[0035][0036]
式中,为x的二阶微分。
[0037]
由正弦振荡器的微分方程可得其状态方程,表达式为
[0038][0039]
式中,为x的一阶微分。上式是表述正弦振荡器原理的表达式,当正弦振荡器用在观测器中时,状态x应该用观测值表示。
[0040]
步骤3:利用逆clark变换将和变换为和期望观测的状态变量是三相电流信号,而正弦振荡器的状态量是两相电流信号,因此需要利用逆clark变换将两相电流信号变换为三相电流信号,变换后的三相电流表达式为
[0041]
[0042]
步骤4:在正弦振荡器的基础上添加状态反馈,构成完整的正弦曲线拟合观测器。步骤2中正弦振荡器的状态变量均为幅值为1的单位正余弦信号,并不是实际电流的幅值,因此需要在正弦振荡器的基础上进行状态反馈,状态反馈是反馈增益矩阵和电流误差矩阵的乘积,添加状态反馈后的状态方程为
[0043][0044]
式中,d和e分别为反馈增益矩阵和电流误差矩阵。
[0045]
步骤5:求电流误差矩阵e。将采样的三相电流与观测出的三相电流相减,则电流误差矩阵为
[0046][0047]
步骤6:求解反馈增益矩阵d。设反馈增益矩阵为
[0048][0049]
由于在每一个开关状态下只能从母线电流提求出一相电流信息,因此每次也仅得到一相电流误差,此时可令其余两相电流误差为0。例如当开关状态s=1时,由表1可知,此时a相电流与母线电流相等(ia=id),所以a相电流误差ea也可得出,由于此开关状态下b相和c相电流不能通过母线电流得出,近而不能求出对应的电流误差信号eb和ec,为了简化d的求解,令此开关状态下b相和c相的电流误差为零,则在此开关状态下的状态方程为
[0050][0051]
利用clark变换将状态反馈中得三相电流误差统一为两相电流误差,由于b相和c相的相电流误差为0,所以将b相和c相对应的clark变换矩阵系数置为0,变换后的状态方程为
[0052][0053]
令用式(4)减去式(10)得两相电流误差的状态方程为
[0054][0055]
由式(11)可知,系统矩阵b决定了观测器的渐近稳定性,若系统矩阵b的特征值全部位于复平面的左半部分(不包括虚轴),则观测器是渐近稳定性。系统矩阵b的特征方程为
[0056][0057]
取观测器的极点为s1=s2=-3ω,则可求得d
1a
=6ω和d
2a
=8ω,同理,当b相或c相电流不为0时,可分别求得d
1b
=3.8ω、d
2b
=-9.2ω和d
1c
=-9.9ω、d
2c
=1.2ω,整理可得反馈增益矩阵为
[0058][0059]
步骤7:根据反馈增益矩阵构建完整的正弦曲线拟合观测器。步骤6中求解了反馈增益矩阵,则完整的正弦曲线拟合观测器的状态方程可写为
[0060][0061]
将三相电流误差方程式(7)代入正弦曲线拟合观测器状态方程式(14)可构建整个正弦曲线拟合观测器的结构,如附图4所示。
[0062]
下面将介绍一个仿真例程验证本发明的正确性和有效性。
[0063]
本实施例程中的永磁同步电动机参数见表2,仿真模型的采样时间ts为5μs。为验证本发明的有效性,在不同转速和转矩下分别对比了实际三相电流和重构三相电流的波形,实际电机输出的三相电流波形如附图5所示,利用正弦曲线拟合观测器重构的三相电流波形如附图6所示,实际电流与重构电流之间的误差如附图7所示。在附图5、6和7中,0s~0.05s的仿真条件为转速n=1000rpm、转矩t
l
=0.1n
·
m,0.05s~0.1s的仿真条件为转速n=2000rpm、转矩t
l
=0.1n
·
m,0.1s~0.15s的仿真条件为转速n=2000rpm、转矩t
l
=0.2n
·
m。
[0064]
表2本实施例程中永磁同步电动机参数
[0065][0066]
从附图5、6和7中可以看出,在启动时重构电流的误差最大,在0.05s突变转速时的误差比0.1s突变转矩时的误差大,这是由于转速突变时,电流迅速增大以提高电磁转矩,进而提高转速的动态响应速度,所以电流的突然增大导致重构的电流瞬时误差增大,因为正弦曲线拟合观测器存在状态反馈,所以重构的电流将逐渐的逼近实际电流。从上述分析可知,正弦曲线拟合观测器在静态时的电流重构精度较好,在动态时电流重构的精度随电流突变幅值的增大而增大。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1