一种快速的执行器制动装置的制作方法
1.本发明涉及一种快速的执行器制动装置,属于执行器制动技术领域。
背景技术:
2.执行器(final controlling element)是自动化技术工具中接收控制信息并对受控对象施加控制作用的装置,制动是其重要的一个功能,但现有设计的执行器制动装置控制精度不高,在执行制动指令时,执行器不能立刻停止转动,另外,机械摩擦较大,降低了执行器的工作寿命。
技术实现要素:
3.本发明的目的在于克服现有技术中的不足,提供一种快速的执行器制动装置,提高控制精度,在执行制动指令时,执行器可以快速停止转动,提高执行器的工作寿命。
4.为达到上述目的,本发明是采用下述技术方案实现的:
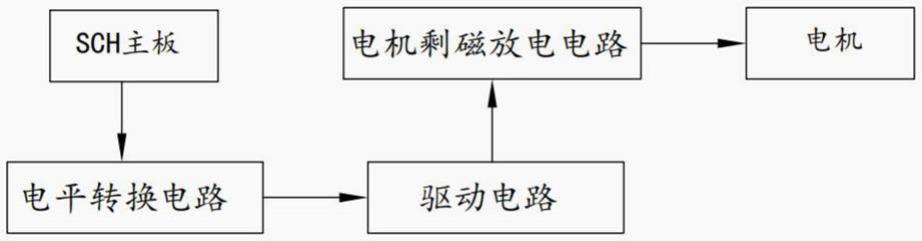
5.本发明提供了一种快速的执行器制动装置,包括:sch主板、电机、电平转换电路、驱动电路以及电机剩磁放电电路,sch主板与电平转换电路连接,电平转换电路与驱动电路连接,驱动电路与电机剩磁放电电路连接,电机剩磁放电电路与电机相连接。
6.具体电路如下:
7.sch主板输出的刹车信号通过电阻ra2与三极管qa1的基极相连,三极管qa1的发射极与5v直流电源相连且集电极分别通过电阻ra3与三极管qa2的基极、通过电阻ra4与三极管qa3的基极相连;
8.所述三极管qa2的集电极分别与保护芯片ua1、二极管da4、继电器rl2相连接,所述二极管da4的负极和继电器rl2均通过电阻ra5与保护芯片ua1相连,所述继电器rl2的静触电与保护芯片ua1相连,继电器rl2的动触点通过电阻ra8与双向可控硅tra1的引出端t1极相连,双向可控硅tra1的控制极与继电器rl2的动触点之间还设置有电阻ra7;双向可控硅tra1的引出端t2极与二极管da8相连,所述二极管da8的负极与保护芯片ua1相连,所述双向可控硅tra1的控制极与电感l1相连,所述电感l1分别与电阻ra9、二极管da6的负极、刹车电容e1的正极相连,所述电阻ra9、二极管da6的正极、刹车电容e1的负极均与电机的中线n相连;
9.所述三极管qa3的集电极与二极管da5的正极相连,所述二极管da5与继电器ka1并联,继电器ka1的静触电与电机的u相相连,继电器ka1的第一动触点与二极管da7的正极相连,继电器ka1的第二动触点与二极管da8的负极相连。
10.三极管qa2和三极管qa3的发射极均接地。
11.所述二极管da4的负极、继电器rl2、继电器ka1均与直流电源相连。
12.优选的,所述刹车电容的容量为100~1000uf。
13.优选的,sch主板输出刹车信号,通过电阻ra2驱动三极管qa1动作,输出高电平,高电平通过电阻ra4驱动三极管qa3动作,驱动三极管qa1动作,使继电器ka1的3脚和5脚接通;
通过电阻ra3驱动三极管qa2动作,驱动保护芯片ua1、继电器rl2动作,使继电器rl2的4脚和8脚接通,电容e1上之前充好的电,通过电感l1,接通的双向可控硅tra1,二极管da8,继电器ka1,到电机的u相,然后从电机的中线n,再回到电容的负极,组成放电回路,开始放电,制动电机转动,进行制动。
14.与现有技术相比,本发明所达到的有益效果:电路简单,刹车电容放电制动电机转动,使执行器立刻停止转动,提高控制精度,从而减小机械摩擦,提高执行器的工作寿命。
附图说明
15.图1是本发明一种快速的执行器制动装置的结构框图;
16.图2是本发明一种快速的执行器制动装置的电路图。
具体实施方式
17.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
18.实施例1
19.本实施例介绍一种快速的执行器制动装置,其框图如图1所示,包括:sch主板、电机、电平转换电路、驱动电路以及电机剩磁放电电路,sch主板与电平转换电路连接,电平转换电路与驱动电路连接,驱动电路与电机剩磁放电电路连接,电机剩磁放电电路与电机相连接。
20.具体电路如图2所示,sch主板输出的刹车信号通过电阻ra2与三极管qa1的基极相连,三极管qa1的发射极与5v直流电源相连且集电极分别通过电阻ra3与三极管qa2的基极、通过电阻ra4与三极管qa3的基极相连;
21.所述三极管qa2的集电极分别与保护芯片ua1、二极管da4、继电器rl2相连接,所述二极管da4的负极和继电器rl2均通过电阻ra5与保护芯片ua1相连,所述继电器rl2的静触电与保护芯片ua1相连,继电器rl2的动触点通过电阻ra8与双向可控硅tra1的引出端t1极相连,双向可控硅tra1的控制极与继电器rl2的动触点之间还设置有电阻ra7;双向可控硅tra1的引出端t2极与二极管da8相连,所述二极管da8的负极与保护芯片ua1相连,所述双向可控硅tra1的控制极与电感l1相连,所述电感l1分别与电阻ra9、二极管da6的负极、刹车电容e1的正极相连,所述电阻ra9、二极管da6的正极、刹车电容e1的负极均与电机的中线n相连;
22.所述三极管qa3的集电极与二极管da5的正极相连,所述二极管da5与继电器ka1并联,继电器ka1的静触电与电机的u相相连,继电器ka1的第一动触点与二极管da7的正极相连,继电器ka1的第二动触点与二极管da8的负极相连。
23.三极管qa2和三极管qa3的发射极均接地。
24.所述二极管da4的负极、继电器rl2、继电器ka1均与直流电源相连。
25.优选的,所述刹车电容的容量为100~1000uf。
26.使用时,sch主板输出刹车信号,通过电阻ra2驱动三极管qa1动作,输出高电平,高电平通过电阻ra4驱动三极管qa3动作,驱动三极管qa1动作,使继电器ka1的3脚和5脚接通;通过电阻ra3驱动三极管qa2动作,驱动保护芯片ua1、继电器rl2动作,使继电器rl2的4脚和
8脚接通,电容e1上之前充好的电,通过电感l1,接通的双向可控硅tra1,二极管da8,继电器ka1,到电机的u相,然后从电机的中线n,再回到电容的负极,组成放电回路,开始放电,制动电机转动,进行制动。
27.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
技术特征:
1.一种快速的执行器制动装置,其特征在于,包括:sch主板、电机、电平转换电路、驱动电路以及电机剩磁放电电路,sch主板与电平转换电路连接,电平转换电路与驱动电路连接,驱动电路与电机剩磁放电电路连接,电机剩磁放电电路与电机相连接。2.根据权利要求1所述的快速的执行器制动装置,其特征在于:sch主板输出的刹车信号通过电阻ra2与三极管qa1的基极相连,三极管qa1的发射极与5v直流电源相连且集电极分别通过电阻ra3与三极管qa2的基极、通过电阻ra4与三极管qa3的基极相连;所述三极管qa2的集电极分别与保护芯片ua1、二极管da4、继电器rl2相连接,所述二极管da4的负极和继电器rl2均通过电阻ra5与保护芯片ua1相连,所述继电器rl2的静触电与保护芯片ua1相连,继电器rl2的动触点通过电阻ra8与双向可控硅tra1的引出端t1极相连,双向可控硅tra1的控制极与继电器rl2的动触点之间还设置有电阻ra7;双向可控硅tra1的引出端t2极与二极管da8相连,所述二极管da8的负极与保护芯片ua1相连,所述双向可控硅tra1的控制极与电感l1相连,所述电感l1分别与电阻ra9、二极管da6的负极、刹车电容e1的正极相连,所述电阻ra9、二极管da6的正极、刹车电容e1的负极均与电机的中线n相连;所述三极管qa3的集电极与二极管da5的正极相连,所述二极管da5与继电器ka1并联,继电器ka1的静触电与电机的u相相连,继电器ka1的第一动触点与二极管da7的正极相连,继电器ka1的第二动触点与二极管da8的负极相连。3.根据权利要求2所述的快速的执行器制动装置,其特征在于:三极管qa2和三极管qa3的发射极均接地。4.根据权利要求3所述的快速的执行器制动装置,其特征在于:所述二极管da4的负极、继电器rl2、继电器ka1均与直流电源相连。5.根据权利要求4所述的快速的执行器制动装置,其特征在于:所述刹车电容的容量为100~1000uf。6.根据权利要求5所述的快速的执行器制动装置,其特征在于:sch主板输出刹车信号,通过电阻ra2驱动三极管qa1动作,输出高电平,高电平通过电阻ra4驱动三极管qa3动作,驱动三极管qa1动作,使继电器ka1的3脚和5脚接通;通过电阻ra3驱动三极管qa2动作,驱动保护芯片ua1、继电器rl2动作,使继电器rl2的4脚和8脚接通,电容e1上之前充好的电,通过电感l1,接通的双向可控硅tra1,二极管da8,继电器ka1,到电机的u相,然后从电机的中线n,再回到电容的负极,组成放电回路,开始放电,制动电机转动,进行制动。
技术总结
本发明公开了一种快速的执行器制动装置,包括:SCH主板、电机、电平转换电路、驱动电路以及电机剩磁放电电路,SCH主板输出刹车信号,通过电阻RA2驱动三极管QA1动作,输出高电平,高电平通过RA4驱QA3动作,驱动QA1动作,使KA2的3脚和5脚接通;过RA3驱QA2动作,驱动UA1、RL2动作,使RL2的4脚和8脚接通,与之接通的,这样E1上之前充好的电,通过L1,接通的TRA1,DA8,KA1,到电机的U相,然后从电机的中线N,再回到电容的负极,组成放电回路,开始放电,制动电机转动,进行制动;本发明电路简单,刹车电容放电制动电机转动,使执行器立刻停止转动,提高控制精度,从而减小机械摩擦,提高执行器的工作寿命。命。命。
技术研发人员:董建伟 陆成 曹博
受保护的技术使用者:苏州成科自控设备有限公司
技术研发日:2021.12.21
技术公布日:2022/5/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1