一种新型电机的制作方法
1.本实用新型涉及电机技术领域,具体而言,涉及一种新型电机。适用于内转子电机、外转子电机、多元盘式电机等。
背景技术:
2.随着电子芯片等电机驱动不断的创新发展。电机搭配不同的电机控制系统实现多功能方向发展成为了电机的新可能,比如低转速大扭距(转距)型、高转速大扭距(转距)大功率型、电机减速刹车、电机发电等多元化发展(即一机+多集成电路的搭配),为了更好的服务于智能装备市场,永磁电机的集多元化电机控制系统将成为新的发展方向。
3.在现有电机中,绕阻连线方式均采用星形连法(y型连法)和三角形连接方式。电机运行时电机转子以旋转磁场方式运行,运行时在输出功率方面(电能转动能),输出功率较低。
技术实现要素:
4.针对现有技术存在的问题,本实用新型提供一种新型电机,通过电路的电子开关h桥,配合采用u、v、w绕线独立连线方法(简称三一连法,即三个一字并连方式)。原理是将电机u组绕线,v组绕线,w组绕线,每组绕线两端均加有独立的电子开关,再通过霍尔传感器检测转子磁钢的s极和n极位置,通过接受到的霍尔传感器的位置信号控制电子开关的开闭,分别独立控制每组绕线的通电电流方向,使输出的各绕阻线定子发生s极或者n极输出功率转换。再配合转子对应磁钢(强磁、磁瓦)的s极和n极。做出同极相斥,异极相吸原理,做功率输出,使电机转子旋转起来。使电能转动能效率方面更加高效。
5.本实用新型的技术方案是:一种新型电机,包括定子铁芯和转子磁钢,所述定子铁芯上绕制有定子绕组,所述定子绕组包括u相绕组、v相绕组以及w相绕组;
6.还包括集成电路,所述集成电路包括电源和三组电子开关h桥,所述三组电子开关h桥分别为第一组电子开关h桥、第二组电子开关h桥和第三组电子开关h桥;
7.每组电子开关h桥包括四个电子开关,四个电子开关分别为第一电子开关、第二电子开关、第三电子开关和第四电子开关;所述第一电子开关和第二电子开关串联后一端连接电源正极,另一端连接电源负极;所述第三电子开关和第四电子开关串联后一端连接电源正极,另一端连接电源负极;所述第一电子开关和第二电子开关的中间连接节点为第一连接节点,所述第三电子开关和第四电子开关的中间连接节点为第二连接节点;
8.优选的,每组电子开关h桥还包括电容,电容两端分别连接电源正负极。实现旁路、去藕、滤波和储能。
9.所述u相绕组的头端和尾端分别连接第一组电子开关h桥的第一连接节点和第二连接节点;
10.所述v相绕组的头端和尾端分别连接第二组电子开关h桥的第一连接节点和第二连接节点;
11.所述w相绕组的头端和尾端分别连接第三组电子开关h桥的第一连接节点和第二连接节点;
12.还包括三个用于检测转子磁铁n级或s级位置的霍尔传感器和根据接受到的霍尔传感器的位置信号控制电子开关的开闭的电子开关控制器;安装时三个霍尔传感器感应磁极的方向一致。
13.进一步的,三个霍尔传感器沿顺时针方向分别为第一霍尔传感器,第二霍尔传感器和第三霍尔传感器;相邻霍尔传感器与电机旋转中心之间的连线夹角等于相邻定子铁芯硅钢铁片中心线之间的夹角。
14.进一步的,所述第三霍尔传感器的设置位置为:当u相绕组对应的一个定子铁芯硅钢铁片中心线和一个转子磁钢中心线重合时,第三霍尔传感器位于转子的两个磁钢s极n极磁感线中线位置处。
15.进一步的,u相绕组、v相绕组以及w相绕组的漆包线线径,绕阻线的长度、绕线方向方法均相同,且所述绕阻线的长度包含连接到电路元器件的长度。
16.进一步的,所述定子铁芯和转子磁钢的数量的配比为1:2/3的1倍或2倍。
17.进一步的,所述定子铁芯的数量为12个,所述转子磁钢的数量为16个或者8个。
18.进一步的,所述电机为内转子电机、外转子电机或者多元盘式电机。
19.本实用新型的有益效果是:使用时采用霍尔传感器检测转子磁钢的s极和n极位置,通过接受到的霍尔传感器的位置信号控制电子开关的开闭,分别独立控制每组绕线的通电电流方向,使输出的各绕阻线定子发生s极或者n极输出功率转换;再配合转子对应磁钢的s极和n极,根据同极相斥异极相吸原理做功率输出,使电机转子旋转起来。当调整三组电子开关h桥两个连接节点与对应的电机绕阻线两端统一反接,电机转向相反。
20.相比较于原星(y)型连接(原理为定子三组绕线中,均为其中两组绕线产生旋转磁场工作)或三角形接连(原理为三组绕线中,均为其中一组或两组绕线产生旋转磁场工作)。本电机的优点在于每组绕线首尾端均有独立电子开关。可实现三组绕线分别同时独立做功率输出,采取输出的各绕阻线定子发生s极或者n极输出功率转换;再配合转子对应磁钢的s极和n极,根据同极相斥异极相吸原理做功率输出。在配合转子强磁的不同数量配比。扭距等性能会更加出色。
21.现有技术中星(y)型连接会根据输出扭距(转距)及转速要求来确定电机漆包线线径的粗细等。(普遍存在的需要要求及性能是扭距大,转速低,功率小。)三角形接连根据输出扭距(转距)及转速要求来确定电机漆包线线径的粗细等。(普遍存在的需要要求及性能是扭距小,转速高,功率大。本电机提供的通过电路的电子开关h桥,配合采用u、v、w绕线独立连线方法(简称三一连法,即三个一字并连方式)。相对于三角形连接同等输出功率,漆包线的线径可以选择更细些,主要原因在于三组绕线分别同时做功率输出。
22.本电机原理,可通过弱电信号或简易弱电开关控制电机的正反转。或通过plc等编程控制电子开关控制器,进而控制各电子开关的开闭,让电机在运行时做到加减速,反转等操作。
23.同时本次方案中提及的电机定子及转子数量的配比方式,也可实现星(y)型连接和三角形接连方案。
附图说明
24.图1为实施例中转子第一位置图;
25.图2为实施例中转子旋转至第二位置图;
26.图3为实施例中转子旋转至第三位置图;
27.图4为实施例中转子旋转至第四位置图;
28.图5为实施例中转子旋转至第五位置图;
29.图6为实施例中转子旋转至第六位置图;
30.图7为12定子16转子时的外转子电机的霍尔传感器的安装示意图;
31.图8为12定子8转子时的外转子电机结构示意图;
32.图9为12定子8转子时的内转子电机结构示意图;
33.图10为12定子16转子时的内转子电机结构示意图;
34.图11为112定子16转子时的内转子电机的霍尔传感器的安装示意图。
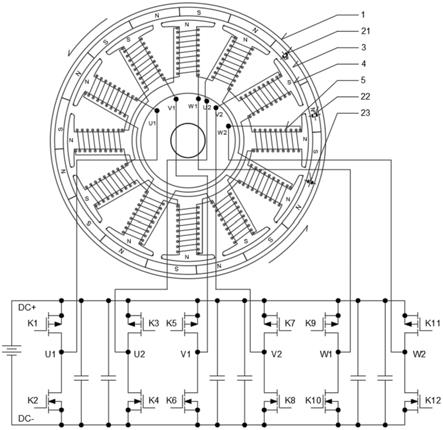
35.其中:1为电机外壳,21为第一霍尔传感器,22为第二霍尔传感器,23为第三霍尔传感器,3为转子磁钢,4为定子铁心,5为漆包线绕阻,eq为均分,dc+为直流电正极,dc
‑
为直流电负极,vcc为直流低压信号+(高低电平电压根据电子元器件要求),gnd为信号公用地端。
具体实施方式
36.下面结合附图对本实用新型做进一步的说明。
37.本实施例提供一种新型电机,适用于内转子电机、外转子电机、多元盘式电机等。主要通过电路的电子开关h桥,配合采用u、v、w绕线独立连线方法(简称三一连法,即三个一字并连方式)。原理是将电机u组绕线,v组绕线,w组绕线,每组绕线两端均加有独立的电子开关,再通过霍尔传感器检测转子磁钢的s极和n极位置,通过接受到的霍尔传感器的位置信号控制电子开关的开闭,分别独立控制每组绕线的通电电流方向,使输出的各绕阻线定子发生s极或者n极输出功率转换。再配合转子对应磁钢(强磁、磁瓦)的s极和n极。做出同极相斥,异极相吸原理,做功率输出,使电机转子旋转起来。使电能转动能效率方面更加高效。
38.电机要求(结构特征):
39.如图1所示,分为u1至u2,v1至v2,w1至w2三组绕线。要求每组绕线5漆包线线径,u、v、w绕阻线的长度(包含连接到电路元器件的长度)、绕线方向方法,要求全部一致。
40.转子磁钢(强磁、磁瓦)与绕线定子数量的比例要求:
41.根据电机大小及扭距的需要,转子磁钢数量为偶数(2、4、6、8、10
…
),定子的数量和转子磁钢(强磁、磁瓦)数量的配比为一比(三分之二)的1倍或2倍。
42.如图1所示定子的数量为12个,转子磁钢(强磁、磁瓦)的数量可以是16个。(转速慢扭距大)。
43.如图8所示定子的数量为12个,转子磁钢(强磁、磁瓦)的数量可以是8个。(转速快扭距小)。
44.如图10所示定子的数量为12个,转子磁钢(强磁、磁瓦)的数量可以是16个。(转速慢扭距大)。
45.如图9所示定子的数量为12个,转子磁钢(强磁、磁瓦)的数量可以是8个。(转速快扭距小)。
46.本实施例中,如图1所示,定子的数量为12个,转子磁钢(强磁、磁瓦)的数量是16个。集成电路包括电源和三组电子开关h桥,所述三组电子开关h桥分别为第一组电子开关h桥、第二组电子开关h桥和第三组电子开关h桥;
47.每组电子开关h桥包括四个电子开关,四个电子开关分别为第一电子开关、第二电子开关、第三电子开关和第四电子开关;所述第一电子开关和第二电子开关串联后一端连接电源正极,另一端连接电源负极;所述第三电子开关和第四电子开关串联后一端连接电源正极,另一端连接电源负极;所述第一电子开关和第二电子开关的中间连接节点为第一连接节点,所述第三电子开关和第四电子开关的中间连接节点为第二连接节点;
48.优选的,每组电子开关h桥还包括电容,电容两端分别连接电源正负极。实现旁路、去藕、滤波和储能。
49.所述u相绕组的头端连接第一组电子开关h桥的第一连接节点,所述u相绕组的尾端连接第一组电子开关h桥的第二连接节点;其中,第一组电子开关h桥中包含电子开关k1,k2,k3,k4。
50.所述v相绕组的头端连接第二组电子开关h桥的第一连接节点,所述v相绕组的尾端连接第二组电子开关h桥的第二连接节点。其中,第二组电子开关h桥中包含电子开关k5,k6,k7,k8。
51.所述w相绕组的头端连接第三组电子开关h桥的第一连接节点,所述w相绕组的尾端连接第三组电子开关h桥的第二连接节点。其中,第三组电子开关h桥中包含电子开关k9,k10,k11,k12。
52.电机中还包括3个用于检测转子磁铁n级或s级位置的霍尔传感器和根据接受到的霍尔传感器的位置信号控制电子开关的开闭的电子开关控制器。
53.霍尔传感器和定子的位置关系:如图7或图11所示在定子铁心4硅钢铁片中心线和转子磁钢(强磁、磁瓦)中心线重合时,第三霍尔传感器23要安装于转子的两个磁钢s极n极磁感线中线位置。共计三组如图7和图11所示位置,要求三个霍尔传感器感应磁极的方向要一致。三个霍尔传感器沿顺时针方向设置,相邻霍尔传感器与电机旋转中心之间的连线夹角等于相邻定子铁芯硅钢铁片中心线之间的夹角。
54.通过霍尔传感器检测转子磁钢的s极和n极位置,通过接受到的霍尔传感器的位置信号控制电子开关的开闭,本实施例中,电子开关控制器中设定霍尔传感器与电路电子元器件开关关系如图1:
55.第三霍尔传感器23发生vcc信号时,(k1,k4)组电子开关闭合,(k2,k3)组电子开关断开。(电路h桥半桥工作)。
56.第三霍尔传感器23发生gnd信号时,(k2,k3)组电子开关闭合,(k1,k4)组电子开关断开。(电路h桥半桥工作)。
57.第二霍尔传感器22发生vcc信号时,(k9,k12)组电子开关闭合,(k10,k11)组电子开关断开。(电路h桥半桥工作)。
58.第二霍尔传感器22发生gnd信号时,(k10,k11)组电子开关闭合,(k9,k12)组电子开关断开。(电路h桥半桥工作)。
59.第一霍尔传感器21发生vcc信号时(k5,k8)组电子开关闭合,(k6,k7)组电子开关断开。(电路h桥半桥工作)。
60.第一霍尔传感器21发生gnd信号时(k6,k7)组电子开关闭合,(k5,k8)组电子开关断开。(电路h桥半桥工作)。
61.注:三组霍尔传感器信号输出端高低信号经电子控制器输出和电子开关元器件信号输入端统一反接,电机转向相反。
62.当调整三组电子开关h桥两个连接节点与对应的电机绕阻线两端统一反接,电机转向相反。
63.具体详细方案说明:
64.如图1所示,转子磁钢n极在第三霍尔传感器23位置,第三霍尔传感器23位置发生vcc信号,(k1,k4)组电子开关闭合,(k2,k3)组电子开关断开。u1、u2绕阻定子n级输出。同时转子磁钢n极在第二霍尔传感器22位置,第二霍尔传感器22发生vcc信号,(k9,k12)组电子开关闭合,(k10,k11)组电子开关断开。w1、w2绕阻定子n级输出。同时转子磁钢s极在第一霍尔传感器21位置,第一霍尔传感器21发生gnd信号,(k6,k7)组电子开关闭合,(k5,k8)组电子开关断开。v1、v2绕阻定子s级输出。转子逆时针旋转。
65.当转子逆时针旋转至图2位置时,转子磁钢n极在第三霍尔传感器23位置,第三霍尔传感器23发生vcc信号,(k1,k4)组电子开关闭合,(k2,k3)组电子开关断开。u1、u2绕阻定子n级输出。同时转子磁钢s极在第二霍尔传感器22位置,第二霍尔传感器22发生gnd信号,(k10,k11)组电子开关闭合,(k9,k12)组电子开关断开。w1、w2绕阻定子s级输出。同时转子磁钢s极在第一霍尔传感器21位置,第一霍尔传感器21发生gnd信号,(k6,k7)组电子开关闭合,(k5,k8)组电子开关断开。v1、v2绕阻定子s级输出。转子逆时针旋转。
66.当转子逆时针旋转至图3位置时,转子磁钢n极在第三霍尔传感器23位置,第三霍尔传感器23发生vcc信号,(k1,k4)组电子开关闭合,(k2,k3)组电子开关断开。u1、u2绕阻定子n级输出。同时转子磁钢s极在第二霍尔传感器22位置。第二霍尔传感器22发生gnd信号,(k10,k11)组电子开关闭合,(k9,k12)组电子开关断开。w1、w2绕阻定子s级输出。同时转子磁钢n极在第一霍尔传感器21位置,第一霍尔传感器21发生vcc信号,(k5,k8)组电子开关闭合,(k6,k7)组电子开关断开。v1、v2绕阻定子n级输出。转子逆时针旋转。
67.当转子逆时针旋转至图4位置时,转子磁钢s极在第三霍尔传感器23位置,第三霍尔传感器23发生gnd信号,(k2,k3)组电子开关闭合,(k1,k4)组电子开关断开。u1、u2绕阻定子s级输出。同时转子磁钢s极在第二霍尔传感器22位置,第二霍尔传感器22发生gnd信号,(k10,k11)组电子开关闭合,(k9,k12)组电子开关断开。w1、w2绕阻定子s级输出。同时转子磁钢n极在第一霍尔传感器21位置,第一霍尔传感器21发生vcc信号,(k5,k8)组电子开关闭合,(k6,k7)组电子开关断开。v1、v2绕阻定子n级输出。转子逆时针旋转。
68.当转子逆时针旋转至图5位置时,转子磁钢s极在第三霍尔传感器23位置,第三霍尔传感器23发生gnd信号(k2,k3)组电子开关闭合,(k1,k4)组电子开关断开。u1、u2绕阻定子s级输出。同时转子磁钢n极在第二霍尔传感器22位置,第二霍尔传感器22发生vcc信号,(k9,k12)组电子开关闭合,(k10,k11)组电子开关断开。w1、w2绕阻定子n级输出。同时转子磁钢n极在第一霍尔传感器21位置,第一霍尔传感器21发生vcc信号(k5,k8)组电子开关闭合,(k6,k7)组电子开关断开。v1、v2绕阻定子n级输出。转子逆时针旋转。
69.当转子逆时针旋转至图6位置时,转子磁钢s极在第三霍尔传感器23位置,第三霍尔传感器23发生gnd信号,(k2,k3)组电子开关闭合,(k1,k4)组电子开关断开。u1、u2绕阻定
子s级输出。同时转子磁钢n极在第二霍尔传感器22位置,第二霍尔传感器22发生vcc信号,(k9,k12)组电子开关闭合,(k10,k11)组电子开关断开。w1、w2绕阻定子n级输出。同时转子磁钢s极在第一霍尔传感器21位置,第一霍尔传感器21发生gnd信号(k6,k7)组电子开关闭合,(k5,k8)组电子开关断开。v1、v2绕阻定子s级输出。转子逆时针旋转至图1位置,重复图1
‑
图6动作。
70.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1