无人驾驶飞行器机载电力架线装置的制作方法
1.本实用新型涉及架线装置技术领域,尤其涉及一种无人驾驶飞行器机载电力架线装置。
背景技术:
2.在对电线架线过程中,需要利用辅助装置对线束的位置进行调节,便于实现有效固定,在对其位置进行调节时,首先通过人工拿取辅助装置对其进行收紧聚拢,然后利用固定件对其进行固定,采用人工拿取的方式,会增强工作人员工作强度,且工作效率低具有安全隐患。
3.综上可知,现有技术在实际使用上显然存在不便与缺陷,所以有必要加以改进。
技术实现要素:
4.针对上述的缺陷,本实用新型的目的在于提供一种无人驾驶飞行器机载电力架线装置,其可以实现对线束的快速聚拢,便于其后续固定,提高工作效率和工作质量。
5.为了实现上述目的,本实用新型提供一种无人驾驶飞行器机载电力架线装置,包括飞行器本体和活动连接飞行器本体的限位装置,所述限位装置包括限位环、固定连接限位环的支撑架和活动连接支撑架的限位杆,所述支撑架包括呈半包围结构的上支撑板、右支撑板、下支撑板和左支撑板;所述限位杆包括第一限位杆和第二限位杆,所述第一限位杆端部套接右支撑板,且所述第一限位杆上设有滑槽和限位槽,所述右支撑板内部设有容纳空间,所述容纳空间内安装有第一弹性件,所述下支撑板上设有移动槽,且所述第二限位杆两端分别活动于滑槽和移动槽内,所述右支撑板和第二限位杆之间安装有第二弹性件。
6.根据本实用新型的无人驾驶飞行器机载电力架线装置,所述限位环安装有两个,且两个所述限位环之间的间隙长度为上支撑板长度的三分之一。
7.根据本实用新型的无人驾驶飞行器机载电力架线装置,所述右支撑板上安装有挡板,所述挡板下端安装有弹性橡胶。
8.根据本实用新型的无人驾驶飞行器机载电力架线装置,所述右支撑板上还设有导向槽,所述第一限位杆端部设有与导向槽相匹配的凸起,且所述凸起活动于导向槽内。
9.根据本实用新型的无人驾驶飞行器机载电力架线装置,所述第一弹性件上下两端分别连接第一限位杆和下支撑板,所述第一弹性件和第二弹性件均为弹簧。
10.根据本实用新型的无人驾驶飞行器机载电力架线装置,所述第二限位杆两端均安装有滑轮,且所述第二限位杆上端具有弧形段,所述滑槽和限位槽连接处设有与弧形段相匹配的弧形边。
11.根据本实用新型的无人驾驶飞行器机载电力架线装置,所述左支撑板上端和第一限位杆一端均设有缓冲件。
12.本实用新型提供了一种无人驾驶飞行器机载电力架线装置,包括飞行器本体和活动连接飞行器本体的限位装置,所述限位装置包括限位环、固定连接限位环的支撑架和活
动连接支撑架的限位杆,所述支撑架包括呈半包围结构的上支撑板、右支撑板、下支撑板和左支撑板,通过支撑架实现对多线束位置的有效限定,便于实现对线束的聚拢,降低后续的捆绑难度;所述限位杆包括第一限位杆和第二限位杆,所述第一限位杆端部套接右支撑板,且所述第一限位杆上设有滑槽和限位槽,所述右支撑板内部设有容纳空间,所述容纳空间内安装有第一弹性件,所述下支撑板上设有移动槽,且所述第二限位杆两端分别活动于滑槽和移动槽内,所述右支撑板和第二限位杆之间安装有第二弹性件,通过第一限位杆实现对第二限位杆位置的限定及导向移动,使其在移动过程中与支撑架相结合实现对线束的聚拢,提高后续的捆绑效率。本实用的有益效果:通过支撑架实现对线束位置的有效限定和支撑,便于限位杆对其进行聚拢,提高后续的捆扎效果和捆扎效率。
附图说明
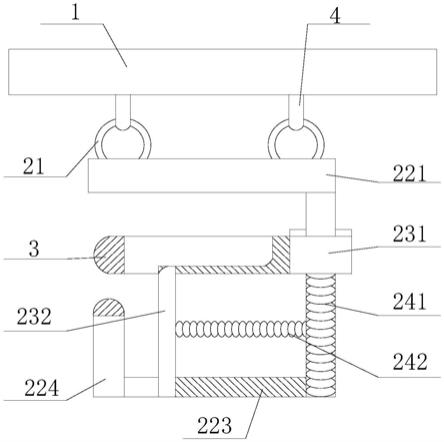
13.图1是本实用新型的结构示意图。
14.图2是本实用新型中支撑架的结构示意图。
15.图3是本实用新型中第一限位杆的结构示意图。
16.在图中,1
‑
飞行器本体,21
‑
限位环,221
‑
上支撑板,222
‑
右支撑板,223
‑
下支撑板,224
‑
左支撑板,231
‑
第一限位杆,232
‑
第二限位杆,241
‑
第一弹性件,242
‑
第二弹性件,3
‑
缓冲件,4
‑
绑带,5
‑
挡板,61
‑
滑槽,62
‑
限位槽。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明,应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
18.参见图1~3,本实用新型提供了一种无人驾驶飞行器机载电力架线装置,包括飞行器本体1和活动连接飞行器本体1的限位装置,所述限位装置包括限位环21、固定连接限位环21的支撑架和活动连接支撑架的限位杆,所述支撑架包括呈半包围结构的上支撑板221、右支撑板222、下支撑板223和左支撑板224,通过支撑架实现对多线束位置的有效限定,便于实现对线束的聚拢,降低后续的捆绑难度;所述限位杆包括第一限位杆231和第二限位杆232,所述第一限位杆231端部套接右支撑板222,且所述第一限位杆231上设有滑槽61和限位槽62,所述右支撑板222内部设有容纳空间,所述容纳空间内安装有第一弹性件241,所述下支撑板223上设有移动槽,且所述第二限位杆232两端分别活动于滑槽61和移动槽内,所述右支撑板222和第二限位杆232之间安装有第二弹性件242,通过第一限位杆231实现对第二限位杆232位置的限定及导向移动,使其在移动过程中与支撑架相结合实现对线束的聚拢,提高后续的捆绑效率。
19.优选的是,本实用新型的右支撑板222上安装有挡板5,所述挡板5下端安装有弹性橡胶,通过弹性橡胶实现挡板5与第一限位杆231之间的摩擦,降低其碰撞力,延长其使用寿命。
20.另外,本实用新型的右支撑板222上还设有导向槽,所述第一限位杆231端部设有与导向槽相匹配的凸起,且所述凸起活动于导向槽内,通过导向槽实现对第一限位杆231位置的限定,保证其能够实现有效升降。
21.进一步的,本实用新型的第一弹性件241上下两端分别连接第一限位杆231和下支撑板223,所述第一弹性件241和第二弹性件242均为弹簧,通过第一弹性件241实现对第一限位杆231位置的限定,利用第二弹性件242来为第二限位杆232提供缓冲力,进而保证其使用寿命,降低制造维修成本。
22.更好的,本实用新型的第二限位杆231两端均安装有滑轮,且所述第二限位杆232上端具有弧形段,所述滑槽61和限位槽62连接处设有与弧形段相匹配的弧形边,通过滑轮降低第二限位杆232与下支撑板223之间的摩擦,进而延长其使用寿命。
23.本实用新型在实施过程中:通过飞行器本体1对限位装置进行移动,飞行器本体1采用现有技术的无人驾驶飞行器,该飞行器与限位装置之间通过限位环21和绑带4连接即可,利用飞行器本体1带动限位装置移动至需捆绑线束附近,然后使线束经第一限位杆231和左支撑板224之间的间隙进入到第一限位杆231、第二限位杆232、下支撑板223和左支撑板224组成的半包围结构内,然后继续移动限位装置,使线束贴近第二限位杆232并带动第二限位杆232往右移动,当第二限位杆232端部经滑槽61移动至限位槽62内时,第一弹性件241带动第一限位杆231实现复位,即带动第一限位杆231下降,以此来使第一限位杆231、第二限位杆232、下支撑板223和左支撑板224组合形成包围结构,并将线束限位至该包围结构内,便于后续采用卡扣对线束的捆绑。捆绑完成后,由于第二弹性件242对第二限位杆232的反作用力,会推动第二限位杆232实现左移,进而使第二限位杆232上端从限位槽62内移动至滑槽61内,实现对第二限位杆232的上升推动,进而实现分开,便于下次工作。左支撑板224上端和第一限位杆231一端均设有缓冲件3,通过缓冲件3实现左支撑板224和第一限位杆231之间的有效缓冲,降低缓冲力,保证部件之间的有效接触,提高其工作效率。
24.综上所述本实用新型提供了一种无人驾驶飞行器机载电力架线装置,包括飞行器本体和活动连接飞行器本体的限位装置,所述限位装置包括限位环、固定连接限位环的支撑架和活动连接支撑架的限位杆,所述支撑架包括呈半包围结构的上支撑板、右支撑板、下支撑板和左支撑板,通过支撑架实现对多线束位置的有效限定,便于实现对线束的聚拢,降低后续的捆绑难度;所述限位杆包括第一限位杆和第二限位杆,所述第一限位杆端部套接右支撑板,且所述第一限位杆上设有滑槽和限位槽,所述右支撑板内部设有容纳空间,所述容纳空间内安装有第一弹性件,所述下支撑板上设有移动槽,且所述第二限位杆两端分别活动于滑槽和移动槽内,所述右支撑板和第二限位杆之间安装有第二弹性件,通过第一限位杆实现对第二限位杆位置的限定及导向移动,使其在移动过程中与支撑架相结合实现对线束的聚拢,提高后续的捆绑效率。本实用的有益效果:通过支撑架实现对线束位置的有效限定和支撑,便于限位杆对其进行聚拢,提高后续的捆扎效果和捆扎效率。
25.当然,本实用新型还可有其它多种实施例,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员当可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1