用于感应电动机的静态偏心故障检测的方法与流程
本公开总体涉及感应电动机,并且更一般地涉及估计具有主槽谐波(principleslotharmonic)信号的一组psh感应电动机的静态偏心故障严重性。
背景技术:
1、传统的感应电动机可用于各种工业应用,包括泵系统、离心机系统、化学系统、石油化工系统、电气化运输系统等。在很多应用中,这些机器在不利条件(诸如高环境温度、高湿气和过载)下操作,这最终会导致电动机故障,由此导致高维护成本和由于意外停机造成的严重财务损失。感应机器的故障通常归因于不同类别的故障,其包括驱动逆变器故障、定子绕组绝缘击穿、断裂的转子杆故障、以及诸如轴承故障和偏心等的机械故障。ieee工业应用协会(ieee-ias)和日本电气制造商协会(jema)对感应机器的故障进行的几次调查表明:机械故障是最常见的故障类型。
2、偏心是由定子孔和转子之间形成不等气隙引起的一种类型的电动机故障。例如,在健康的电动机中,转子与定子孔进行中心对齐,并且转子的旋转中心与定子孔的几何中心相同。当定子和转子之间的气隙变得不相等时,会发生偏心相关故障。由于转子相对于定子的定位不准确、轴承磨损、定子芯移动、轴偏转等,可能会发生气隙偏心故障。电动机偏心故障有三种类型:动态偏心(de)、静态偏心(se)以及作为de和se的组合的混合偏心(me)。根据de,转子也从定子中心移位,但是转子绕定子中心的中心旋转,即,转子的中心不在旋转中心处。由于该原因,最小气隙的位置随转子旋转。有几个因素导致de故障,诸如转子轴弯曲、轴承磨损或轴承错位、临界速度下的机械共振等。
3、在转子绕其自身中心线旋转,但是该中心线与定子孔的中心线不重合时发生静态偏心(se)故障,即,转子偏离定子中心,而是转子绕其自己的中心旋转。se可能由椭圆形定子芯或由定子或转子的不正确定位引起。se和动态偏心(de)可能同时发生,并且在这种情况下,定子的中心、转子的中心和旋转轴线相对于彼此移位。关于识别静态偏心,当电动机以四分之一满载运行时,可以通过电流和电压频谱中的基频周围出现的边带分量的存在来观察静态偏心的影响。
4、因此,尤其需要用于定量检测具有主槽谐波(psh)信号的一组psh感应电动机的静态偏心(se)故障的系统和方法。
技术实现思路
1、本公开涉及感应电动机,并且更具体地,涉及估计具有主槽谐波(psh)信号的一组psh感应电动机(im)的静态偏心(se)故障严重性。
2、具体地,一些实施方式被设计为检测具有多个转子杆和极对的特殊组合的一组主槽谐波感应电动机(psh型im)的se故障。im的se故障诊断可在它们的制造过程期间用于质量测试或检查。如果在制造过程期间未检测到se故障诊断,则im电动机将最终失效,其中im失效的原因将在后面讨论。
3、传统的静态偏心(se)故障检测方法使用利用psh电流信号的电动机电流特征(signature)分析方法。然而,今天的传统se故障检测方法无法检测这些特定psh型im的se故障。至少一个主要问题是,这组特定的电动机总是在健康条件和偏心故障条件两者下产生psh信号。其中,psh电流信号振幅不表现出对偏心水平的显著依赖性,其被今天传统的se故障检测方法用于检测se故障。这意味着或者意为,对于这些特定psh型im(即,具有多个转子杆和极对的特殊组合),目前还没有已知的方法来检测se故障?这一长期未解决的传统问题每年都会使im行业损失大量的美元,即,在保修期内对失效的im进行维修和对im消费者进行赔偿,损害公司声誉,以及对im行业和im消费者的许多其它负面影响。
4、本公开的至少一个实现是发现用于对具有多个转子杆和极对的特殊组合的该特定组psh型im进行纯se故障检测的系统和方法。从实验中得知,气隙磁导率的二阶谐波可以在具有y形连接绕组的psh型三相im的线电流中感应se水平相关信号。具体而言,该se故障特征电流信号是基于定子生成的磁动势(mmf)的谐波的基本原理生成的。由于psh型im具有多个转子杆和多个极对的特殊组合,因此产生了特征信号。其中,通过使用psh型三相im的实验测试模拟验证了特征信号的这种生成机制。本公开的分析电动机模型使用特征信号来定量检测psh型三相im的se故障。
5、为了更好地掌握psh型三相im的se故障,应知晓理解偏心的多个方面。例如,偏心是一种由在不均匀的定子孔和转子之间形成不均匀气隙引起的感应电动机(im)故障。存在三种类型的感应电动机偏心故障:静态偏心(se)、动态偏心(de)以及混合偏心(me),即,me为静态偏心和动态偏心二者的混合。感应电动机的se是在制造过程期间由于定子孔的椭圆度、轴承的未对准等产生的。se故障的检测最好在早期阶段进行,并且事实上是非常重要的,因为se故障会随着im的操作时间的增加而演变为me故障。se故障可能是由于不平衡的磁拉力导致的,这可能导致me故障,并最终导致im损坏、失效,从而无法操作。不同类型的感应电动机都包括定子、转子、轴和轴承。一些im可以是鼠笼式感应电动机,其中,如上所述,由于制造误差而发生im的偏心故障,导致定子和转子之间的气隙不均匀。
6、本公开的一些实施方式结合了气隙磁导率的二阶谐波,该二阶谐波针对psh型im的电流中的se故障生成se故障特征电流信号,其提供用于psh型im的se故障检测。se故障特征电流信号位于次级psh频率,并且特征信号对静态偏心水平具有多项式依赖性,该特征信号是相对较小的信号。在次级psh信号周围对信号进行滤波,并且将得到的se故障特征电流信号与本公开的电动机设计参数的预先计算的查找se故障特征信号表进行比较,以找到静态偏心水平。
7、换言之,对于psh型im,气隙磁导率的二阶谐波可以在电动机的线电流中感应se依赖信号。该信号提供了基于有效电动机电流特征分析(mcsa)的psh型im的se检测的新方法,它克服并解决了今天的传统方法的长期未决问题。具体地,次级主槽谐波(psh)电流信号的振幅相对于se水平而变化,并且可以用于y连接psh型感应电动机的se故障检测。其中,y连接方面意味着机器绕组以三线y配置连接,具有隔离中性点或浮动中性点。本公开的这些psh型im的se故障的一些检测方法被开发和构造为包括:(1)使用信号处理模块(即,快速傅里叶变换操作以计算特征信号的频谱)从im传感器数据中检测电流信号的频谱;(2)使用所存储的im数据来获得所述im的转子杆的数量和极对的数量,以从一组im中识别主槽谐波(psh)型im,并且使用所识别的psh型im来识别位于所述psh型im的次级psh频率处的se故障特征电流信号;(3)确定所述电流信号的频谱在所述次级psh频率的位置处的信号强度水平,并且与se故障表数据库进行比较以获得所述psh型im的se故障水平;以及(4)将se故障水平与具有相同对应se故障水平的异常数据库进行比较,以获得se故障阈值,并且如果se故障水平在se阈值之外,则生成具有相关动作的中断命令并将其发送到控制器。
8、气隙磁导率的二阶谐波的重要性在实验期间通过测试分析方法得以实现,该实验旨在基于三相psh型im的se故障检测方法,即,通过多个转子杆和极对的特殊组合,找到有效的电动机电流特征分析(mcsa)。一些测试方法只考虑了气隙磁导率的常数和一次谐波项,这导致“无法”捕获由于高阶气隙磁导率谐波而生成的偏心相关信号。然而,通过计算和绘制气隙磁导率函数的前几次谐波的傅里叶系数,后来认识到,与气隙磁导率函数的基波和一阶谐波相比,当转子中的偏心故障变得显著时,气隙磁导率函数的二次谐波是明显的。因此,人们认识到,通过忽略气隙磁导率函数的二阶谐波会导致在分析偏心相关信号时得出错误的结论。
9、因此,随后进行了进一步测试,包括定子生成磁动势(mmf)的基波的实验方法。为了解释mmf,mmf作用于气隙磁导率,产生气隙磁通分布,并且转子杆中的定子生成磁通感应电流生成转子mmf。在im中,定子生成磁动势(mmf)的基波具有几个分量,包括多个极对、供应角频率、定子固定参考系中的机械角位置、以及定子mmf的基波的振幅。当感应电动机具有静态偏心(se)故障时,气隙可以包括标称气隙长度、修正气隙长度以用于经由定子槽的开槽效应的卡特系数以及se水平。其中,计算感应电动机的气隙磁导率,并且用傅里叶级数表示。测试期间观察到,作用于气隙磁导率的定子mmf产生气隙磁通分布。例如,在转子杆中的定子生成磁通感应电流生成转子mmf。除了与定子生成气隙磁通具有相同波长的谐波外,观察到还生成额外转子槽谐波。这些转子槽谐波被可视化为由离散转子杆采样的原始波形,并且再次作用于间隙并生成气隙磁通。我们了解到,在计算转子生成气隙磁通时,存在几种不同的谐波。
10、从这些测试方法中还认识到,se相关电流特征信号的生成是由于气隙磁通,并且所生成的电流信号的频率始终是psh频率。为了在电动机绕组中生成线电流信号,气隙磁通需要在定子绕组中感应无零序电压。还注意到,气隙磁通在健康条件和偏心条件两者下都存在,并且当电动机意味着一定条件时,气隙磁通可以生成psh信号。对于特定电动机类型,只能生成一个psh信号。
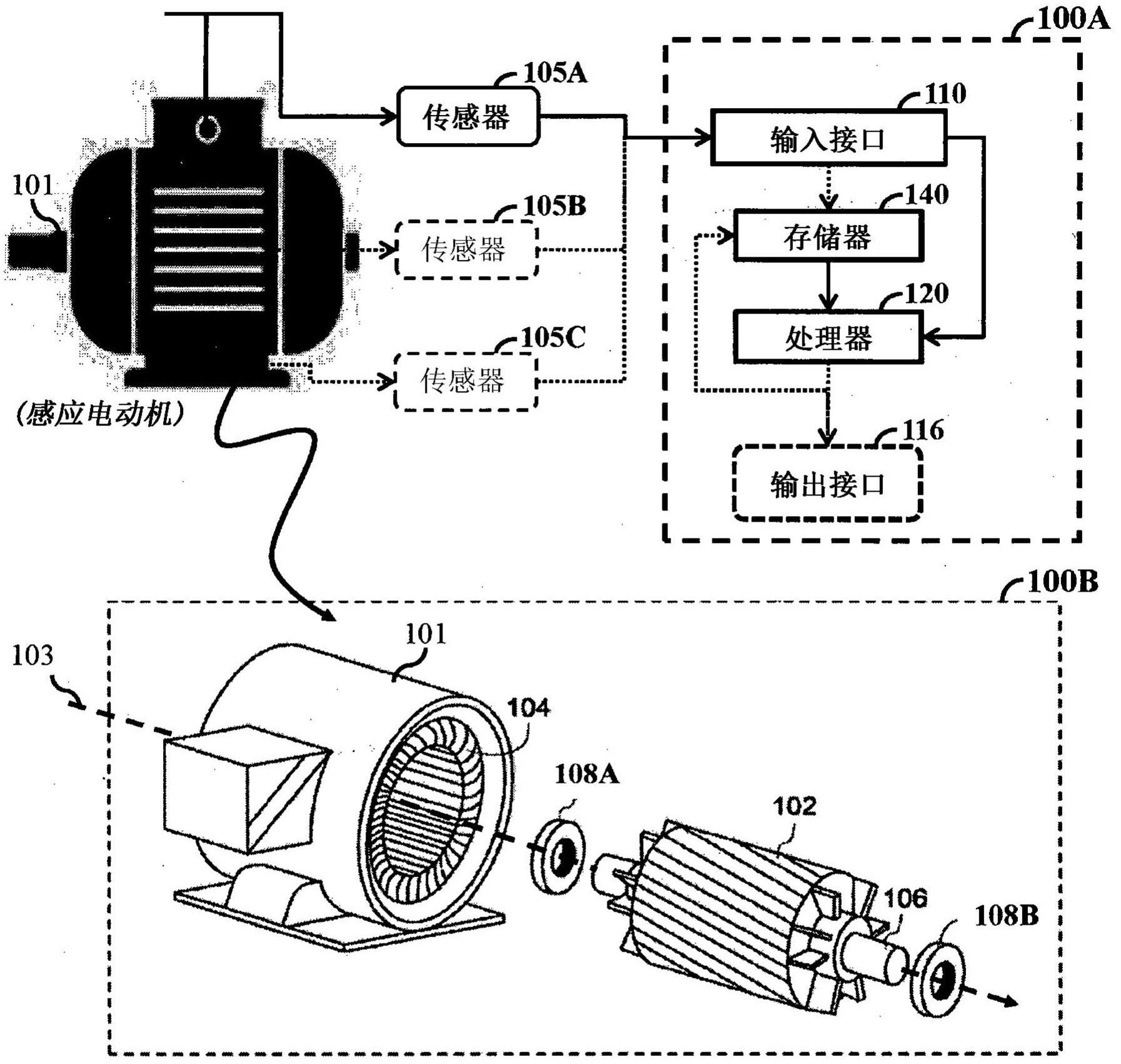
11、本公开的一些实施方式可用于通过收集各种测量结果作为到系统的输入来监测和控制感应电动机的操作。例如,与感应电动机和系统联接的控制器可以基于从传感器接收的输入来控制感应电动机的操作,所述传感器被配置为获取与感应电动机的操作条件有关的测量数据。从电信号传感器(即,电流传感器、电压传感器或两者)获得的测量数据被用于获取感应电动机的电流数据和电压数据。例如,电流传感器感测来自感应电动机的多个相中的一个或更多个相的电流数据。本公开的一些实施方式包括具有三相感应电动机的感应电动机,其中电流传感器和电压传感器感测来自三相感应电动机的三相的电流数据和电压数据。
12、实际应用
13、本公开的系统和方法可以利用电动机的电流中的特征信号来定量检测psh型im的se故障。特别是,感应电动机的se故障诊断可以被用于在制造过程期间的质量检查、以及其它方面。其中,本公开的系统和方法可以使用修正的绕组函数理论(mwft)来精确地对感应电动机滚珠轴承故障进行建模。从而表明可以计算定子电流谱,并且可以用相应故障电流分量的振幅来量化轴承故障的故障严重性。
14、本公开的系统和方法克服了传统im方法无法识别实际电动机损耗的问题以促进电动机设计过程。其中,本公开的方法已经开发了使用电动机电流信号的电动机故障诊断技术,使得电动机故障诊断可以用于高精度电动机故障检测。可以使用本公开的系统和方法的一些工业应用包括泵系统、离心机系统、化学系统、石油化工系统、电气化运输系统等。
15、实验
16、在实验期间,一些测试方法包括使用电动机电流特征分析(mcsa),因为mcsa方法具有成本低、可靠性高和配置简单的优点,并且不需要额外的传感器或数据采集硬件。对于具有纯静态偏心故障的被测试感应电动机,电流信号中的特征频率由下式确定:
17、
18、其中
19、f是基本电源频率,
20、r是转子槽的数量,
21、s是滑移(slip),p是极对数,
22、k是任何正整数,
23、nd是偏心阶数,其对于静态偏心,取值0,对于动态偏心,取值1、2、3…
24、ν是定子时间谐波的阶数。
25、其中,当k=ν=1时,(1)中的频率与电动机的主槽谐波(psh)信号匹配。
26、(1)中的频率下的特征电流信号对于用于偏心故障检测的大多数三相感应电动机是有效的。然而,后来从这些测试mcsa实验方法中发现,当感应电动机的极对数量p和转子槽数量r组合满足以下公式时:
27、r=2p[3(m±q)±r], (2)
28、其中,m±q=0,±1,±2,…并且r=0或1,(1)中所示的特征频率下的电流无法检测到纯静态偏心故障。这是因为在这组感应机器中,psh电流信号是在健康条件和偏心条件两者下生成的,并且其振幅不显示出对偏心水平的显著依赖性。基于进一步的测试和基于模型的仿真,我们发现,对于psh型感应电动机,根本不存在有效的基于mcsa的静态故障检测方法。
29、根据本公开的实施方式,一种用于监测和控制感应电动机(im)的操作的系统。系统包括在一时间段内从im获得传感器数据的传感器。控制器与im、传感器和存储器联接。其中,存储器包括所存储的数据库和具有可执行指令的模块以及所存储的包括im数据的数据。控制器的处理器被配置为使用信号处理模块从传感器数据检测电流信号的频谱。使用所存储的im数据来获得im的转子杆的数量和极对的数量,以从一组im中识别主槽谐波(psh)型im,并使用psh型im来识别位于psh型im的次级psh频率处的静态偏心故障特征信号。识别电流信号的频谱在次级psh频率的位置处的信号强度水平。与预先计算的se故障表数据库进行比较,以获得psh型im的se故障水平;并将se故障水平与异常数据库中的和se阈值相关联的se故障的相同对应水平进行比较;并且如果在se阈值之外,则在该时间段内生成并发送se故障操作中断命令以及至少一个命令动作。通过控制器接收中断命令和至少一个命令动作。控制器停止psh型im操作,并基于中断命令向通信网络输出至少一个命令动作。
30、根据本公开的另一实施方式,一种用于监测和控制感应电动机(im)的操作的系统。系统包括传感器,传感器在一时间段内从im的多个相位中的一个或更多个相位获得im的包括感测的电流数据和电压数据的操作条件。控制器与im、传感器和存储器联接,存储器包括所存储的数据库和具有可执行指令的模块以及包括im的im数据的数据,并且控制器基于接收到传感器数据来控制im的操作。控制器的处理器被配置为使用信号处理模块从传感器数据检测电流信号的频谱。使用所存储的im数据来获得从传感器数据获得的im的转子杆的数量和极对的数量,以识别主槽谐波(psh)型im和位于psh型im的次级psh频率处的静态偏心故障特征信号。识别电流信号的频谱在次级psh频率的位置处的信号强度水平,并将所识别的信号强度水平与查找表数据库进行比较,以获得psh型im的静态偏心故障水平。将所获得的静态偏心故障水平与异常数据库进行比较,并与来自异常数据库的相同静态偏心故障水平的静态偏心阈值进行比较,并且如果获得的静态偏心故障水平在偏心阈值之外,则生成静态偏心故障操作中断命令以停止psh im的操作,并向控制器发送操作中断命令。通过控制器接收偏心故障操作中断命令,控制器基于从偏心故障操作中断命令中获得的静态偏心故障水平中断psh im的操作,该命令还包括由控制器发起并输出到通信网络的操作检查和维修动作以用于进一步检查或维修psh型im。
31、本公开的另一实施方式提供了一种用于监测和控制主槽谐波感应(pshi)电动机的操作的系统。系统包括获得包括pshi电动机的操作条件的传感器数据的传感器。控制器与pshi电动机、传感器和存储器联接,存储器包括所存储的数据库、具有可执行指令的模块、以及包括pshi电动机数据的数据,并且控制器基于传感器数据控制pshi电动机的操作。控制器的处理器被配置为使用信号处理模块从传感器数据检测电流信号的频谱。访问pshi电动机数据以识别psh电动机的转子杆的数量和极对的数量,然后识别位于pshi电动机的次级psh频率的静态偏心故障特征信号。识别次级psh频率的位置处的电流信号的频谱中的信号强度水平,并将所识别的信号强度水平与查找表数据库进行比较,以获得psh型电动机的静态偏心故障水平。将获得的静态偏心故障水平与异常数据库进行比较,与来自异常数据库的相同静态偏心故障水平的静态偏心阈值进行比较,并且如果获得的静态偏心故障水平在偏心阈值之外,则生成静态偏心故障操作中断命令以停止psh电动机的操作,并向控制器发送操作中断命令。由控制器接收偏心故障操作中断命令。控制器基于从偏心故障操作中断命令获得的静态偏心故障水平来中断psh电动机的操作,该命令还包括由控制器启动并输出到通信网络的操作检查和维修动作,以用于进一步检查或维修psh型感应电动机。
32、本公开的另一实施方式提供了一种用于控制感应电动机(im)的操作的系统。系统包括传感器,传感器在一时间段内获得im的包括电流数据和电压数据的传感器数据。控制器与im、传感器和存储器联接。存储器包括所存储的数据库和具有可执行指令的模块以及包括im的im数据的数据,并且所述控制器基于接收到传感器数据来控制im的操作。控制器的处理器被配置为使用信号处理模块从传感器数据检测电流信号的频谱。使用im数据获得im的转子杆的数量和极对的数量,以从一组im中识别该im。其中,所述一组im包括具有多个转子杆的鼠笼式感应电动机,其中,电动机配置包括位于内部的转子和位于外部的定子组件。使用im识别位于im的次级psh频率下的静态偏心(se)故障特征信号。确定电流信号的频谱在次级psh频率的位置处的信号强度水平,并且与se故障表数据库进行比较以获得im的se故障水平。将se故障水平与异常数据库进行比较,以获得se故障阈值,并且如果se故障水平在se阈值之外,则在该时间段内生成具有相关命令动作的中断命令并将其发送到控制器。当由控制器接收到中断命令时停止im操作,并将命令动作输出到通信网络以基于命令动作控制im的操作。
33、将参照附图进一步解释当前公开的实施方式。所示的附图不一定是按比例绘制的,而是通常强调说明当前公开的实施方式的原理。
- 还没有人留言评论。精彩留言会获得点赞!