一种压电粘滑旋转运动平台
1.本发明属于纳米定位技术领域,涉及毫米级大行程、纳米级高分辨率的小体积精密位移驱动器,特别涉及一种可产生旋转运动的压电粘滑定位平台。
背景技术:
2.压电粘滑运动平台是一种既能实现毫米乃至厘米级大行程、又能实现纳米级高分辨率的精密位移驱动器。在锯齿波电压作用下,压电粘滑旋转运动平台通过压电执行器的缓慢伸长与迅速缩短,进而使定子与动子间产生静动摩擦力之差,将压电执行器的纳米级直线位移不断累加为动子的连续旋转位移,进而实现超过360
°
的大转角。相对于电磁式平台,压电粘滑运动平台具有无磁场、易于控制、不存在端部效应及推力波动等优点;相对于超声谐振式、尺蠖驱动式等压电平台,压电粘滑运动平台具有磨损轻微、控制系统简单、步进速度快等优点。因此,在需要微型化、轻量化、无磁场的微纳操作技术领域,如微机电系统(mems)组装、细胞微操作、扫描电镜(em)观察等,压电粘滑运动平台展现出独特优势。但目前的压电粘滑旋转运动平台还存在以下不足:1)电机整体结构组成复杂、不紧凑;2)定子和动子的装配及调节过程复杂;3)平台每步运动回退位移大,运动速度慢;4)平台驱动力不足,负载能力低;5)平台导向机构大多不是采用作为标准件的导轨,这一方面使加工制作成本变高,另一方面定动子间存在严重的摩擦磨损,使平台寿命降低。
技术实现要素:
3.本发明所要解决的技术问题是针对上述现有技术的现状,而提供结构布局合理、动子和定子装配及调节简单、运动速度快、负载能力强、定动子间摩擦磨损小的一种压电粘滑旋转运动平台。
4.本发明解决上述技术问题所采用的技术方案为:一种压电粘滑旋转运动平台,包括底座和设置在底座上方的动平台,动平台的下方设有环状体,环状体的外周顺次等分分布有第一驱动单元、第二驱动单元、第三驱动单元和第四驱动单元;第一驱动单元、第二驱动单元、第三驱动单元和第四驱动单元的结构相同,包括限位件、柔性机构,以及撑在柔性机构内的压电执行器,压电执行器设于环状体外弧面的切线方向;柔性机构包括顶在压电执行器伸长端的斜楔块;斜楔块包括贴在环状体外周面的平面部,以及背离环状体的斜面部,限位件顶设在斜面部上。动平台和环状体是动子,底座和四个驱动单元是定子。
5.为优化上述技术方案,采取的措施还包括:环状体的内侧同轴设有固定环,固定环固定于底座;固定环和环状体之间均匀环设有第一滚珠。
6.在优选的方案中,环状体和固定环分别设有供第一滚珠滚动的导槽。
7.在优选的方案中,柔性机构还包括顺次连接的固定部、矩形柔性铰链、刚性部和弧形柔性铰链,弧形柔性铰链共有一对,分设于压电执行器的两侧,并连于斜楔块;刚性部与压电执行器的固定端之间夹设有垫片,固定部通过紧固螺钉固定于底座。
8.在优选的方案中,限位件是弹性球头预紧螺钉,底座设有凸台,凸台上设有供限位件旋入的第一螺孔。
9.在优选的方案中,弧形柔性铰链的弯折方向平行于环状体的中心轴。
10.在优选的方案中,刚性部设有通往压电执行器的第二螺孔,第二螺孔设有顶在压电执行器端部的预紧调节螺钉;固定部设有通往第二螺孔的第一操作孔。
11.在优选的方案中,底座设有开口朝向动平台的容纳腔,第一驱动单元、第二驱动单元、第三驱动单元和第四驱动单元、凸台和限位件皆位于容纳腔内。
12.在优选的方案中,底座横向设有从外界通往第一操作孔的第二操作孔,便于螺丝刀探入调节预紧调节螺钉;底座横向设有从外界通往限位件的第三操作孔,便于螺丝刀探入调节限位件。
13.为了避免斜楔块在工作中产生上下抖动,在斜面部上设有导向槽,以供限位件滚滑。
14.与现有技术相比,本发明的一种压电粘滑旋转运动平台,包括底座和设置在底座上方的动平台,动平台的下方设有环状体,环状体的外周顺次等分分布有第一驱动单元、第二驱动单元、第三驱动单元和第四驱动单元;第一驱动单元、第二驱动单元、第三驱动单元和第四驱动单元的结构相同,包括限位件、柔性机构,以及撑在柔性机构内的压电执行器,压电执行器设于环状体外弧面的切线方向;柔性机构包括顶在压电执行器伸长端的斜楔块;斜楔块包括贴在环状体外周面的平面部,以及背离环状体的斜面部,限位件顶设在斜面部上。
15.给第一驱动单元和第三驱动单元的压电执行器缓慢施加电压(t
10
至t
11
),则伸长的压电执行器推动环状体实现旋转运动,继而推动动平台实现旋转运动,压电执行器在伸长过程中,环状体和斜楔块之间的静摩擦力在斜楔块作用下不断增大;一定角度的相位差后,在t
20
给第二驱动单元和第四驱动单元的压电执行器缓慢施加电压(t
20
至t
21
),则伸长的压电执行器亦推动环状体实现旋转运动,待第一驱动单元和第三驱动单元的压电执行器达到额定电压时(t
11
),给第一驱动单元和第三驱动单元的压电执行器突然断电,则第一驱动单元和第三驱动单元迅速复原,而此时动平台和环状体仍在第二驱动单元和第四驱动单元的推动下作旋转运动,从而提升运动速度和驱动力。在第一驱动单元和第三驱动单元完成一个周期的运动后,即开始下一个运动周期(t
12
至t
13
),第二驱动单元和第四驱动单元亦在t
22
开始下一个运动周期,周而复始,不断推动动平台作旋转运动,进而实现超过360
°
的大转角。本发明动子和定子装配及调节简单、运动速度快、负载能力强、定动子间摩擦磨损小。
附图说明
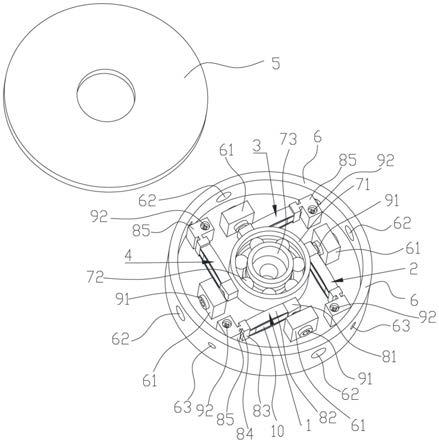
16.图1是本发明实施例一的立体结构示意图;图2是图1的分解示意图;图3是图2进一步分解示意图;
图4是本发明实施例一第一驱动单元的结构示意图;图5是图4是分解示意图;图6是本发明去除动平台后的俯视图;图7是实施例二中第一驱动单元的结构示意图;图8是压电粘滑旋转运动平台的工作时序图。
具体实施方式
17.以下结合附图对本发明的实施例作进一步详细描述。
18.图1至图7为本发明的结构示意图。
19.其中的附图标记为:第一驱动单元1、第二驱动单元2、第三驱动单元3、第四驱动单元4、动平台5、底座6、凸台61、第一螺孔611、第三操作孔62、第二操作孔63、容纳腔64、环状体71、第一滚珠72、固定环73、导槽74、柔性机构80、斜楔块81、平面部811、斜面部812、导向槽813、弧形柔性铰链82、刚性部83、第二螺孔831、矩形柔性铰链84、固定部85、第一操作孔851、限位件91、紧固螺钉92、预紧调节螺钉93、压电执行器10、垫片11。
20.实施例一,如图1至6所示,一种压电粘滑旋转运动平台,包括底座6和设置在底座6上方的动平台5,动平台5的下方设有环状体71,环状体71的外周顺次等分分布有第一驱动单元1、第二驱动单元2、第三驱动单元3和第四驱动单元4;第一驱动单元1、第二驱动单元2、第三驱动单元3和第四驱动单元4的结构相同,包括限位件91、柔性机构80,以及撑在柔性机构80内的压电执行器10,压电执行器10设于环状体71外弧面的切线方向;柔性机构80包括顶在压电执行器10伸长端的斜楔块81;斜楔块81包括贴在环状体71外周面的平面部811,以及背离环状体71的斜面部812,限位件91顶设在斜面部812上。动平台5和环状体71是动子,底座6和四个驱动单元是定子。
21.实施例中,如图2、3、6所示,环状体71的内侧同轴设有固定环73,固定环73固定于底座6;固定环73和环状体71之间均匀环设有第一滚珠72。环状体71能够绕着固定环73同轴转动,增加了动平台5的稳定性。
22.实施例中,如图3所示,环状体71和固定环73分别设有供第一滚珠72滚动的导槽74。环状体71、第一滚珠72、固定环73也可以用轴承替代。优选的方案中环状体71的下端与底座6之间有间隙。
23.实施例中,如图4和图5所示,柔性机构80还包括顺次连接的固定部85、矩形柔性铰链84、刚性部83和弧形柔性铰链82,弧形柔性铰链82共有一对,分设于压电执行器10的两侧,并连于斜楔块81;刚性部83与压电执行器10的固定端之间夹设有垫片11,如图2和图3所示,固定部85通过紧固螺钉92固定于底座6。
24.实施例中,限位件91是弹性球头预紧螺钉,如图3所示,底座6设有凸台61,凸台61上设有供限位件91旋入的第一螺孔611。
25.实施例中,如图3所示,弧形柔性铰链82的弯折方向平行于环状体71的中心轴,即弧形柔性铰链82沿着上下方向进行弯曲移动。
26.实施例中,如图2至5所示,刚性部83设有通往压电执行器10的第二螺孔831,第二螺孔831设有顶在压电执行器10端部的预紧调节螺钉93;固定部85设有通往第二螺孔831的
第一操作孔851。
27.实施例中,如图2、3所示,底座6设有开口朝向动平台5的容纳腔64,第一驱动单元1、第二驱动单元2、第三驱动单元3和第四驱动单元4、凸台61和限位件91皆位于容纳腔64内。
28.实施例中,如图2、3所示,底座6横向设有从外界通往第一操作孔851的第二操作孔63,便于螺丝刀探入调节预紧调节螺钉93;底座6横向设有从外界通往限位件91的第三操作孔62,便于螺丝刀探入调节限位件91。
29.实施例二,实施例二的结构和实施例一相似,不同之处是在斜面部812上设有导向槽813,以供限位件91滚滑,这样能避免斜楔块81在工作中产生上下抖动。
30.实施例中,导向槽813是贯通平面部811和斜面部812的,并且在导向槽813内填充有橡胶,橡胶的端面与平面部811和斜面部812齐平。在限位件91顶压导向槽813中的橡胶时,导向槽813会从平面部811轻微溢出,从而增加平面部811与环状体71之间的静摩擦力。
31.实施例一和实施例二的工作原理:如图8所示,给第一驱动单元1和第三驱动单元3的压电执行器10缓慢施加电压(t
10
至t
11
),则伸长的压电执行器10推动环状体71实现旋转运动,继而推动动平台5实现旋转运动,压电执行器10在伸长过程中,环状体71和斜楔块81之间的静摩擦力在斜楔块81作用下不断增大;一定角度的相位差后,在t
20
给第二驱动单元2和第四驱动单元4的压电执行器10缓慢施加电压(t
20
至t
21
),则伸长的压电执行器10亦推动环状体71实现旋转运动,待第一驱动单元1和第三驱动单元3的压电执行器10达到额定电压时(t
11
),给第一驱动单元1和第三驱动单元3的压电执行器10突然断电,则第一驱动单元1和第三驱动单元3迅速复原,而此时动平台5和环状体71仍在第二驱动单元2和第四驱动单元4的推动下作旋转运动,从而提升运动速度和驱动力。在第一驱动单元1和第三驱动单元3完成一个周期的运动后,即开始下一个运动周期(t
12
至t
13
),第二驱动单元2和第四驱动单元4亦在t
22
开始下一个运动周期,周而复始,不断推动动平台5作旋转运动,进而实现超过360
°
的大转角。
32.本发明的最佳实施例已阐明,由本领域普通技术人员做出的各种变化或改型都不会脱离本发明的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1