一种沿地线巡检机器人出入平台轨道及方法
1.本发明属于电力巡检技术领域,尤其涉及巡检机器人出入平台技术。
背景技术:
2.在电力行业中,最主要的长距离输送电方式是架空输电线路,输电线路的稳定安全就直接影响着整个供电系统的稳定安全,是国家基础设施和社会发展的“动脉”,起着至关重要的作用。因此,对输电线路进行定期的巡检是十分必要的。目前主要的巡检方式为人工巡检与无人机巡检。人工巡检目前主要靠肉眼或者望远镜等辅助装备去观察线路的缺损,强度大、效率低。无人机巡检是靠无人机的摄像头来观察线路的情况,操控难、准确性不高。因此输电线路沿地线巡检机器人在架空线路巡检应用上有很大的前景。
3.目前国内外已有一些不同类型的输电线路巡检机器人,它们可以快速沿着输电线路地线通过输电塔,有一定的越障能力,理论上可以降低巡检的人力成本,但由于所携带的电池容量有限,常常在工作几小时后就需要巡检工人上塔为其更换电池,反而导致了人力成本增加。因此,如何解决输电线路巡检机器人在输电线路杆塔上的充电问题就成了实现智能巡检的关键所在。为此,在输电线路杆塔上设置充电储能平台,但是需要解决出入平台的问题。
技术实现要素:
4.针对现有技术的缺陷,本发明所要解决的技术问题就是提供一种沿地线巡检机器人出入平台轨道及方法,方便巡检机器人可靠、快速地进入充电储能平台,完成充电待机功能。
5.为解决上述技术问题,本发明采用如下技术方案:
6.一方面,提供了一种沿地线巡检机器人出入平台轨道,用于沿地线巡检机器人出入平台,沿地线巡检机器人包括沿x轴依次设置的第一臂式机构、第二臂式机构、第三臂式机构和用于驱动第二臂式机构沿x轴移动的x轴移动伺服电机,所述第一臂式机构、第二臂式机构、第三臂式机构均包括行进机构、旋转机构、升降机构以及y轴移动伺服电机,出入平台轨道包括安装于平台的轨道支架和设于轨道支架的圆弧形钢轨,所述圆弧形钢轨入口端靠近输电线路地线,所述圆弧形钢轨的出口端向平台内侧延伸。
7.优选的,所述圆弧形钢轨的截面为圆形且半径与输电线路地线半径一致。
8.优选的,所述轨道支架包括与输电线路地线垂直的垂直横架、垂直连接于垂直横架下方的若干竖直悬架、连接竖直悬架与圆弧形轨道的若干平行横架。
9.优选的,所述垂直横架平行设有两根,其中一根垂直横架只连接一根竖直悬架,且该竖直悬架连接最外侧一根平行横架的中间部位。
10.优选的,所述平行横架与圆弧形钢轨之间均采用连接底座和螺栓配合进行固定。
11.另外一方面,还提供了一种沿地线巡检机器人出入平台方法,沿地线巡检机器人包括沿x轴依次设置的第一臂式机构、第二臂式机构、第三臂式机构和用于驱动第二臂式机
构沿x轴移动的x轴移动伺服电机,所述第一臂式机构、第二臂式机构、第三臂式机构均包括行进机构、旋转机构、升降机构以及y轴移动伺服电机,所述行进机构包括行走轮和驱动行走轮行进的行进电机,所述旋转机构包括驱动行进机构旋转的旋转电机,所述升降机构包括驱动行进机构升降的升降电机,通过y轴移动伺服电机实现每个臂式机构沿y轴移动,沿地线巡检机器人使用所述的出入平台轨道驶入平台包括以下步骤:
12.a:准备进入平台,巡检机器人在进入平台前切换为驶入平台模式,第一臂式机构在地线内侧,第二臂式机构和第三臂式机构在地线外侧;第一臂式机构驱动升降电机使自身高过第二臂式机构和第三臂式机构,并驱动y轴移动伺服电机将第一臂式机构向地线内侧方向移动,通过驱动x轴移动伺服电机,改变第二臂式机构所处位置,以平衡机器人重心;
13.b:第一臂式机构触碰到平台轨道,巡检机器人在切换至驶入平台模式后,依靠第二臂式机构和第三臂式机构的行进电机前进,直到第一臂式机构的行程开关被平台轨道触碰到,此时,第二臂式机构和第三臂式机构的行进电机停止转动;
14.c:第一臂式机构上平台轨道,第一臂式机构通过旋转电机调整角度,使其正对平台轨道,然后驱动升降电机和y轴移动伺服电机,使第一臂式机构下降,落至平台轨道上;
15.d:巡检机器人倒退,第一臂式机构、第二臂式机构和第三臂式机构的行进电机反向转动一定距离,直至使第一臂式机构靠近平台轨道入口处时,所有行进电机停止转动,此时第二臂式机构从平台轨道中部后退至平台轨道入口之前;
16.e:第二臂式机构脱离地线,第二臂式机构首先通过驱动升降电机和y轴移动伺服电机,向上、向地线外侧的方向移动,然后同步驱动第一臂式机构、第二臂式机构和第三臂式机构的升降电机,其中第一臂式机构和第三臂式机构的升降电机上升,第二臂式机构的升降电机下降,然后使第二臂式机构驱动旋转电机旋转180
°
至平台轨道内侧,最后通过驱动第二臂式机构的升降电机和沿y轴移动伺服电机,使第二臂式机构向上、向地线内侧方向移动;
17.f-h:第二臂式机构上平台轨道动作;
18.i:第三臂式机构脱离地线;
19.j-l:第三臂式机构上平台轨道动作;
20.m:驶入平台动作完成;
21.沿地线巡检机器人使用所述的出入平台轨道驶出平台包括以下步骤:
22.a:准备驶出平台,巡检机器人切换至驶出平台模式,此时第一臂式机构、第二臂式机构和第三臂式机构均在平台轨道内侧;驱动升降电机,使第二臂式机构高过第一臂式机构和第三臂式机构,并驱动y轴移动伺服电机,使其向远离平台轨道方向移动;
23.b:第二臂式机构触碰到平台轨道,巡检机器人在切换至驶出平台模式后,依靠第一臂式机构和第三臂式机构的行进电机反向转动退出平台轨道,直到第二臂式机构的行程开关被平台轨道触碰到,此时,行进电机停止转动;
24.c:第二臂式机构上平台轨道,第二臂式机构通过旋转电机调整角度,使其正对平台轨道,然后驱动升降电机和y轴移动伺服电机,使第二臂式机构下降,落至平台轨道上;
25.d:第三臂式机构脱离轨道,驱动升降电机和沿y轴移动伺服电机,使第三臂式机构向上、向远离平台轨道的方向移动,并使第一臂式机构和第二臂式机构的行进电机反向转动一定距离,直至使第二臂式机构靠近平台轨道入口处,行进电机停止转动;
26.e:第三臂式机构上地线,第三臂式机构通过驱动旋转电机调整角度,使其正对平台轨道,然后驱动升降电机和y轴移动伺服电机,使第三臂式机构下降,落至输电线路地线上;
27.f-g:第二臂式机构上地线动作;
28.h-i:第一臂式机构上地线动作;
29.j:驶出平台动作完成。
30.本发明采用的技术方案,具有如下有益效果:
31.可以使具备越障功能的输电线路沿地线巡检机器人安稳、快速地进入到安装在杆塔附近的充电储能平台,进行自动充电,从而降低巡检任务的人工成本。
32.此外,考虑到应用场景为输电线路杆塔,本发明的所有组件均采用组装形式,便于工人进行塔上安装。
33.本发明采用的具体技术方案及其带来的有益效果将会在下面的具体实施方式中结合附图中予以详细的揭露。
附图说明
34.下面结合附图和具体实施方式对本发明作进一步描述:
35.图1是本发明一种沿地线巡检机器人出入平台轨道的整体结构图;
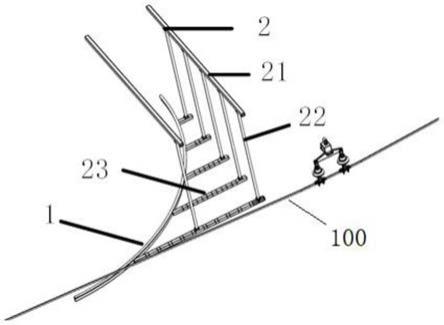
36.图2是本发明一种沿地线巡检机器人出入平台轨道与输电线路杆塔连接的示意图;
37.图3是本发明中圆弧形钢轨与方口管轨道支架连接的示意图;
38.图4是与本发明配套的沿地线巡检机器人示意图;
39.图中:100-输电线路地线,1-圆弧形钢轨,200-平台,2-轨道支架,21-垂直横架,211-连接底座,22-竖直悬架,23-平行横架,3-第一臂式机构,31-第一臂式机构行进电机,32-第一臂式机构旋转电机,33-第一臂式机构升降电机,34-第一臂式机构y轴移动伺服电机,4-第二臂式机构,5-第三臂式机构,6-x轴移动伺服电机。
具体实施方式
40.下面结合本发明实施例的附图对本发明实施例的技术方案进行解释和说明,但下述实施例仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其他实施例,都属于本发明的保护范围。
41.本领域技术人员可以理解的是,在不冲突的情况下,下述的实施例及实施方式中的特征可以相互组合。
42.一种沿地线巡检机器人出入平台轨道,参阅图1至图3所示,包括安装于平台200的轨道支架2和设于轨道支架的圆弧形钢轨1,所述圆弧形钢轨入口端靠近输电线路地线100,所述圆弧形钢轨的出口端向平台内侧延伸。
43.其中,所述圆弧形钢轨的截面为圆形且半径与输电线路地线半径一致,与巡检机器人行进轮形成配合。
44.如图2和图3所示,所述轨道支架由方口管焊接制成,包括与输电线路地线垂直的垂直横架21、垂直连接于垂直横架下方的若干竖直悬架22、连接竖直悬架与圆弧形轨道的
若干平行横架23。所述垂直横架平行设有两根,其中一根垂直横架只连接一根竖直悬架,且该竖直悬架连接最外侧一根平行横架的中间部位。平行横架23与圆弧形钢轨1之间均采用内螺纹和连接底座211搭配螺栓进行固定。
45.如图4所示,与本发明配套的沿地线巡检机器人,包括第一臂式机构3,第二臂式机构4、第三臂式机构5和沿x轴移动伺服电机6。三个臂式机构除了沿y轴移动伺服电机的行程不同外,其余机构均相同,均包括行进机构、旋转机构、升降机构以及y轴移动伺服电机,所述行进机构包括行走轮和驱动行走轮行进的行进电机,所述旋转机构包括驱动行进机构旋转的旋转电机,所述升降机构包括驱动行进机构升降的升降电机,通过y轴移动伺服电机实现每个臂式机构沿y轴移动。行进机构、旋转机构、升降机构具体结构均可以参考现有技术。以第一臂式机构3为例,其包括第一臂式机构行进电机31,第一臂式机构旋转电机32,第一臂式机构升降电机33,第一臂式机构y轴移动伺服电机34。x轴移动伺服电机6仅一个,用于使第二臂式机构4完成沿x轴的伺服平移。
46.沿地线巡检机器人使用本发明的方法,包括了驶入平台流程和驶出平台流程。其中驶入平台流程主要包括以下步骤:
47.a:准备进入平台。巡检机器人由数据库获知下个线路节点为平台轨道,则切换为驶入平台模式,具体为:第一臂式机构3在地线内侧,第二臂式机构4和第三臂式机构5在地线外侧;第一臂式机构3驱动升降电机使自身高过第二臂式机构4和第三臂式机构5,并驱动沿y轴移动伺服电机将第一臂式机构3向地线内侧方向移动。通过驱动x轴移动伺服电机6,改变第二臂式机构4所处位置,以平衡机器人重心。
48.b:第一臂式机构3触碰到平台轨道。整个巡检机器人在切换至驶入平台模式后,依靠第二臂式机构和第三臂式机构的行进电机前进,直到第一臂式机构3的行程开关被平台轨道中部钢轨触碰到。此时,第二臂式机构和第三臂式机构的行进电机停止转动。
49.c:第一臂式机构3上平台轨道。第一臂式机构3依靠旋转电机和内置旋转编码器的配合,使其正对平台轨道,然后驱动升降电机和y轴移动伺服电机,使第一臂式机构3下降,落至平台轨道上。
50.d:巡检机器人倒退。第一臂式机构、第二臂式机构和第三臂式机构的行进电机反向转动一定距离,直至使第一臂式机构3靠近平台轨道入口处时,所有行进电机停止转动,此时第二臂式机构4从平台轨道中部后退至平台轨道入口之前。
51.e:第二臂式机构4脱离地线。第二臂式机构4首先通过驱动升降电机和沿y轴移动伺服电机,向上、向地线外侧的方向移动,然后同步驱动第一臂式机构、第二臂式机构和第三臂式机构的升降电机,其中第一臂式机构和第三臂式机构的升降电机上升,第二臂式机构的升降电机下降,使第二臂式机构4可以驱动旋转电机旋转180
°
至平台轨道1内侧,最后通过驱动升降电机和y轴移动伺服电机,使第二臂式机构4向上、向地线内侧方向移动。
52.f-h:第二臂式机构4上平台轨道动作。整个过程与b-d类似。
53.i:第三臂式机构5脱离地线。整个过程与e类似
54.j-l:第三臂式机构5上平台轨道动作。整个过程与b-d类似。
55.m:驶入平台动作完成。
56.驶出平台流程主要包括以下步骤:
57.a:准备驶出平台。巡检机器人充完电后,收到驶出平台的任务后,则切换至驶出平
台模式,具体为:第一臂式机构3在地线内侧,第二臂式机构4和第三臂式机构5均在平台轨道内侧;驱动第二臂式机构4的升降电机,使第二臂式机构4高过第一臂式机构3和第三臂式机构5,并驱动y轴移动伺服电机,使其向远离平台轨道方向移动。
58.b:第二臂式机构4触碰到平台轨道。整个巡检机器人在切换至驶出平台模式后,依靠第一臂式机构3和第三臂式机构5的行进电机反向转动退出平台轨道,直到第二臂式机构4的行程开关被平台轨道中部钢轨触碰到。此时,第一臂式机构3和第三臂式机构5的行进电机停止转动。
59.c:第二臂式机构4上平台轨道。第二臂式机构4依靠旋转电机和内置旋转编码器的配合,使其正对平台轨道,然后驱动升降电机和y轴移动伺服电机,使第二臂式机构4下降,落至平台轨道上。
60.d:第三臂式机构5脱离轨道。驱动升降电机和y轴移动伺服电机,使第三臂式机构5向上、向远离平台轨道的方向移动,并使第一臂式机构和第二臂式机构的行进电机反向转动一定距离,直至使第二臂式机构4靠近平台轨道入口处,第一臂式机构和第二臂式机构的行进电机停止转动。
61.e:第三臂式机构5上地线。第三臂式机构5依靠旋转电机和内置旋转编码器的配合,使其正对平台轨道,然后驱动升降电机和y轴移动伺服电机,使第三臂式机构5下降,落至输电线路地线上。
62.f-g:第二臂式机构4上地线动作。整个过程与d-e类似。
63.h-i:第一臂式机构3上地线动作。整个过程与d-e类似。
64.j:驶出平台动作完成。
65.综上所述,本发明采用了钢材半径与输电线路地线半径一致的圆弧轨道,降低了巡检机器人驶入驶出平台轨道的动作复杂度,使巡检机器人可以简单、快速地通过平台轨道进入充电储能平台进行充电;独特的三向方口管组件支架设计和基于连接底座的组装式设计,大大降低了在输电线路杆塔上的施工难度,同时保证了平台轨道的稳定性和牢固性。区别于现有的人工替换巡检机器人电池的方案,本发明安装简单,充分地利用了巡检机器人原有的越障功能,为实现巡检机器人输电线路上长期自动运行提供了条件。
66.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于附图和上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1