单相永磁同步电机的控制方法及单相永磁同步电机与流程
本发明涉及电机驱动控制领域,更具体地涉及一种单相永磁同步电机的控制方法及单相永磁同步电机。
背景技术:
1、单相永磁同步电机(single phase permanent magnet synchronous motor,sppmsm)具有结构简单、成本低廉的优势,适合于驱动小功率水泵、风机等,广泛应用于民用和商用领域,特别是家电领域。
2、然而,当前单相永磁同步电机的控制策略主要为在单相永磁同步电机启动过程中的控制,以使得转子尽快被牵入同步速。该控制策略通常包括:基于霍尔传感器检测磁极位置,根据相电压以及霍尔信号决定双向晶闸管的导通角,从而控制转子的旋转方向并完成启动过程。然而,在使用该控制方法时,单相永磁同步电机在运转中的运行稳定性较差,特别是在定子绕组电压幅值波动和负载转矩不稳定时,现有控制方法下的单相永磁同步电机转子易脱离同步速,出现震颤甚至倒转的情况,导致电机失稳,无法实现电机相关功能。
3、因此,需要一种在实现对单相永磁同步电机的良好控制的前提下,具有较高的控制可靠性及鲁棒性的电机控制方法,特别是在定子绕组电压幅值波动和负载转矩不稳定的情况下,实现对该单相永磁同步电机的可靠且稳定控制,提高单相永磁同步电机的抗扰能力。
技术实现思路
1、针对以上问题,本发明提供了一种单相永磁同步电机的控制方法及单相永磁同步电机。利用本发明提供的单相永磁同步电机的控制方法,能够在实现对单相永磁同步电机的良好控制的前提下,有效提高单相永磁同步电机的抗扰能力,使得在定子绕组电压幅值波动和负载转矩不稳定的情况下,仍能实现对单相永磁同步电机的可靠且稳定控制。
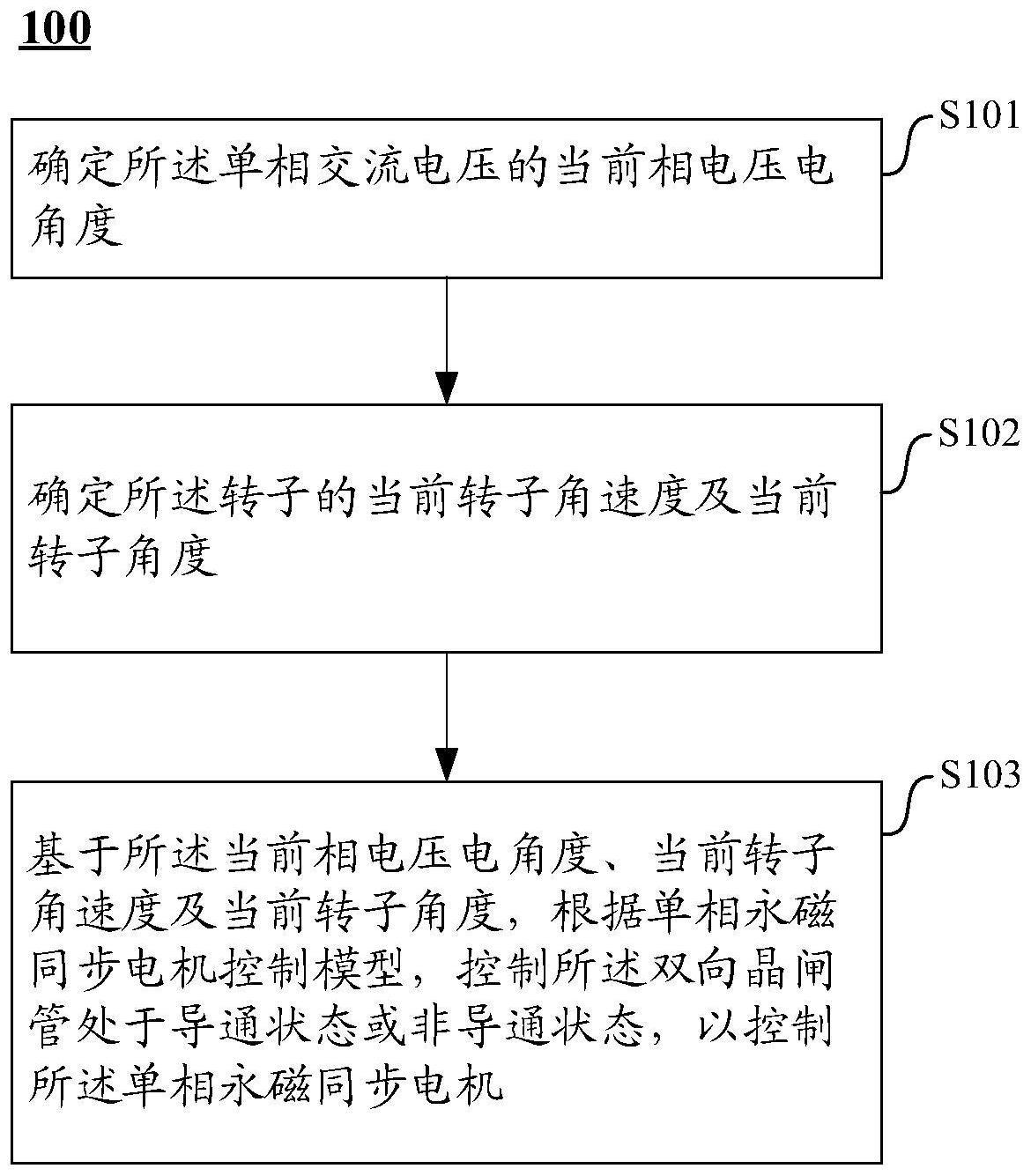
2、根据本公开的一方面,提出了一种单相永磁同步电机的控制方法,所述单相永磁同步电机包括定子、转子及双向晶闸管控制电路,该双向晶闸管控制电路包括双向晶闸管,所述双向晶闸管与定子绕组串联且通入单相交流电压,所述方法包括:确定所述单相交流电压的当前相电压电角度;确定所述转子的当前转子角速度及当前转子角度;基于所述当前相电压电角度、当前转子角速度及当前转子角度,根据单相永磁同步电机控制模型,控制所述双向晶闸管处于导通状态或非导通状态,以控制所述单相永磁同步电机。
3、在一些实施例中,所述确定所述转子的当前转子角速度及当前转子角度包括:获取当前时刻下的转子角速度估计值,并将该当前时刻下的转子角速度估计值确定为当前转子角速度;基于所述当前转子角速度,确定当前转子角度;且其中,所述转子角速度估计值是基于线性霍尔传感器的检测信号,根据转子角速度确定函数确定的。
4、在一些实施例中,确定所述转子角速度估计值包括:在正过偏置时刻,基于所述线性霍尔传感器的检测信号,根据转子角速度确定函数确定正过偏置时刻转子角速度估计值;基于所述正过偏置时刻转子角速度估计值更新所述转子角速度估计值。
5、在一些实施例中,所述转子角速度确定函数包括正过偏置时刻角速度确定函数,且确定所述正过偏置时刻转子角速度估计值包括:确定正过偏置时刻,在该正过偏置时刻,所述线性霍尔传感器检测信号处于正过偏置状态;确定正过偏置时刻之前预设第一时间间隔的正过偏置在先时刻,并获取该正过偏置在先时刻下所述线性霍尔传感器的正过偏置在先检测信号;确定正过偏置时刻之后预设第一时间间隔的正过偏置在后时刻,并获取该正过偏置在后时刻下所述线性霍尔传感器的正过偏置在后检测信号;基于所述正过偏置在先时刻、正过偏置在先检测信号、正过偏置在后时刻、正过偏置在后检测信号及所述第一时间间隔,基于正过偏置时刻角速度确定函数生成所述正过偏置时刻转子角速度估计值。
6、在一些实施例中,确定所述转子角速度估计值包括:在负过偏置时刻,基于所述线性霍尔传感器的检测信号,根据转子角速度确定函数确定负过偏置时刻转子角速度估计值;基于所述负过偏置时刻转子角速度估计值更新所述转子角速度估计值。
7、在一些实施例中,所述转子角速度确定函数包括负过偏置时刻角速度确定函数,且确定所述负过偏置时刻转子角速度估计值包括:确定负过偏置时刻,在该负过偏置时刻,所述线性霍尔传感器检测信号处于负过偏置状态;确定负过偏置时刻之前预设第二时间间隔的负过偏置在先时刻,并获取该负过偏置在先时刻下所述线性霍尔传感器的负过偏置在先检测信号;确定负过偏置时刻之后预设第二时间间隔的负过偏置在后时刻,并获取该负过偏置在后时刻下所述线性霍尔传感器的负过偏置在后检测信号;基于所述负过偏置在先时刻、负过偏置在先检测信号、负过偏置在后时刻、负过偏置在后检测信号及所述第二时间间隔,基于负过偏置时刻角速度确定函数生成所述负过偏置时刻转子角速度估计值。
8、在一些实施例中,确定所述单相交流电压的当前相电压电角度包括:基于电压极性检测电路确定所述单相交流电压的当前相电压电角度,且所述电压极性检测电路的输入为所述单相交流电压;且该方法包括:基于所述电压极性检测电路的输出信息,确定距离当前时刻最近的电压过零时刻,作为最近电压过零时刻;获取当前时刻下电压极性检测电路的输出信息,并基于该输出信息,确定与该输出信息相对应的目标电角度计算公式;基于当前时刻、最近电压过零时刻,根据所述目标电角度计算公式计算所述单相交流电压的当前相电压电角度。
9、在一些实施例中,基于所述当前相电压电角度、当前转子角速度及当前转子角度,根据单相永磁同步电机控制模型,控制所述双向晶闸管处于导通状态或非导通状态,以控制所述单相永磁同步电机包括:基于所述当前相电压电角度、当前转子角速度及当前转子角度,根据单相永磁同步电机控制模型生成输出量;以及在所述输出量满足第一准则的情况下,控制所述双向晶闸管处于导通状态;在该输出量不满足第一准则的情况下,控制所述双向晶闸管处于非导通状态;且其中,所述第一准则对应于所述单相永磁同步电机的电磁转矩在预设功率时间内做正功的情况。
10、在一些实施例中,所述预设功率时间为所述单相永磁同步电机的电角度周期的一半,根据单相永磁同步电机控制模型生成的输出量为:
11、
12、且控制所述双向晶闸管处于导通状态或非导通状态,以控制所述单相永磁同步电机包括:
13、在的情况下,触发双向晶闸管导通,使得双向晶闸管处于导通状态;
14、在的情况下,不触发双向晶闸管导通,使得双向晶闸管处于非导通状态;
15、且其中,x为基于该单相永磁同步电机控制模型计算得到的输出量,α=θc-θr,θc为当前相电压电角度,θr为当前转子角度,ωn为定子额定旋转角度,ωr为当前转子角速度。
16、根据本公开的另一方面,提出了一种单相永磁同步电机,所述单相永磁同步电机包括定子、转子及双向晶闸管控制电路,该双向晶闸管控制电路包括双向晶闸管,所述双向晶闸管与定子绕组串联且通入单相交流电压,所述单相永磁同步电机还包括控制器,所述控制器被包括:相电压电角度确定模块,其被配置为确定所述单相交流电压的当前相电压电角度;转子转动特征确定模块,其被配置为确定所述转子的当前转子角速度及当前转子角度;控制策略生成模块,其被配置为基于所述当前相电压电角度、当前转子角速度及当前转子角度,根据单相永磁同步电机控制模型,控制所述双向晶闸管处于导通状态或非导通状态,以控制所述单相永磁同步电机。
17、在一些实施例中,所述转子转动特征确定模块包括:转子角速度确定模块,其被配置为获取当前时刻下的转子角速度估计值,并将该当前时刻下的转子角速度估计值确定为当前转子角速度;转子角度确定模块,其被配置为基于所述当前转子角速度,确定当前转子角度;且其中,所述单相永磁同步电机还设置有靠近所述转子的线性霍尔传感器,且所述转子角速度估计值是基于线性霍尔传感器的检测信号,根据转子角速度确定函数确定的。
18、在一些实施例中,确定所述转子角速度估计值包括:在正过偏置时刻,基于所述线性霍尔传感器的检测信号,根据转子角速度确定函数确定正过偏置时刻转子角速度估计值;基于所述正过偏置时刻转子角速度估计值更新所述转子角速度估计值。
19、在一些实施例中,所述转子角速度确定函数包括正过偏置时刻角速度确定函数,且确定所述正过偏置时刻转子角速度估计值包括:确定正过偏置时刻,在该正过偏置时刻,所述线性霍尔传感器检测信号处于正过偏置状态;确定正过偏置时刻之前预设第一时间间隔的正过偏置在先时刻,并获取该正过偏置在先时刻下所述线性霍尔传感器的正过偏置在先检测信号;确定正过偏置时刻之后预设第一时间间隔的正过偏置在后时刻,并获取该正过偏置在后时刻下所述线性霍尔传感器的正过偏置在后检测信号;基于所述正过偏置在先时刻、正过偏置在先检测信号、正过偏置在后时刻、正过偏置在后检测信号及所述第一时间间隔,基于正过偏置时刻角速度确定函数生成所述正过偏置时刻转子角速度估计值。
20、在一些实施例中,确定所述转子角速度估计值包括:在负过偏置时刻,基于所述线性霍尔传感器的检测信号,根据转子角速度确定函数确定负过偏置时刻转子角速度估计值;基于所述负过偏置时刻转子角速度估计值更新所述转子角速度估计值。
21、在一些实施例中,所述转子角速度确定函数包括负过偏置时刻角速度确定函数,且确定所述负过偏置时刻转子角速度估计值包括:确定负过偏置时刻,在该负过偏置时刻,所述线性霍尔传感器检测信号处于负过偏置状态;确定负过偏置时刻之前预设第二时间间隔的负过偏置在先时刻,并获取该负过偏置在先时刻下所述线性霍尔传感器的负过偏置在先检测信号;确定负过偏置时刻之后预设第二时间间隔的负过偏置在后时刻,并获取该负过偏置在后时刻下所述线性霍尔传感器的负过偏置在后检测信号;基于所述负过偏置在先时刻、负过偏置在先检测信号、负过偏置在后时刻、负过偏置在后检测信号及所述第二时间间隔,基于负过偏置时刻角速度确定函数生成所述负过偏置时刻转子角速度估计值。
22、在一些实施例中,所述单相永磁同步电机还包括:连接至所述单相交流电压且被配置为检测所述单相交流电压的极性的电压极性检测电路;且所述相电压电角度确定模块包括:最近电压过零时刻确定模块,其被配置为基于所述电压极性检测电路的输出信息,确定距离当前时刻最近的电压过零时刻,作为最近电压过零时刻;目标电角度计算公式模块,其被配置为获取当前时刻下电压极性检测电路的输出信息,并基于该输出信息,确定与该输出信息相对应的目标电角度计算公式;相电压电角度生成模块,其被配置为基于当前时刻、最近电压过零时刻,根据所述目标电角度计算公式计算所述单相交流电压的当前相电压电角度。
23、在一些实施例中,所述控制策略生成模块包括:模型计算模块,其被配置为基于所述当前相电压电角度、当前转子角速度及当前转子角度,根据单相永磁同步电机控制模型生成输出量;以及控制输出模块,其被配置为在所述输出量满足第一准则的情况下,控制所述双向晶闸管处于导通状态;在该输出量不满足第一准则的情况下,控制所述双向晶闸管处于非导通状态;且其中,所述第一准则对应于所述单相永磁同步电机的电磁转矩在预设功率时间内做正功的情况。
24、在一些实施例中,所述预设功率时间为所述单相永磁同步电机的电角度周期的一半,根据单相永磁同步电机控制模型生成的输出量为:
25、
26、且控制所述双向晶闸管处于导通状态或非导通状态,以控制所述单相永磁同步电机包括:
27、在的情况下,触发双向晶闸管导通,使得双向晶闸管处于导通状态;
28、在的情况下,不触发双向晶闸管导通,使得双向晶闸管处于非导通状态;
29、且其中,x为基于该单相永磁同步电机控制模型计算得到的输出量,α=θc-θr,θc为当前相电压电角度,θr为当前转子角度,ωn为定子额定旋转角度,ωr为当前转子角速度。
30、利用本发明提供的单相永磁同步电机的控制方法及单相永磁同步电机,可以在实现对单相永磁同步电机的良好控制的前提下,有效提高单相永磁同步电机的抗扰能力,特别是在定子绕组电压幅值波动和负载转矩不稳定的情况下,该方法仍能实现对单相永磁同步电机的可靠且稳定控制。
- 还没有人留言评论。精彩留言会获得点赞!