复合粘滑与冲击的多模式驱动器及线性平滑运动实现方法
1.本发明涉及精密机械领域,特别涉及一种复合粘滑与冲击的多模式驱动器及线性平滑运动实现方法。本发明提出一种复合了粘滑与冲击的具有三种工作模式的多模式驱动器;同时提出一种用冲击位移弥补回退运动以实现驱动器线性平滑运动的技术方法。在生物细胞工程、集成电路封装和精密光学领域有重要应用价值。
背景技术:
2.粘滑式压电驱动器具有结构紧凑、控制简单和能够实现大行程位移等优势,使其在精密驱动技术领域被广泛关注并被应用在精密定位、生物细胞工程和集成电路封装等领域。
3.但压电驱动器具有回退位移,这影响了驱动器的输出速度和定位精度等输出性能,限制了驱动器的应用领域。抑制粘滑式驱动器的回退运动,消除回退运动的影响以提高驱动器的输出性能是当下学者研究的一个重点。目前抑制回退的办法主要有以下四种:调制控制波形、调节预紧力、协同运动和顺序控制、增加辅助结构。但上述方法存在各自的不足:调制控制波形控制困难且一般需要高频工作,这增加了控制难度也降低了驱动器的寿命;调节预紧力对驱动器的工作环境要求严格,负载能力降低;协同运动和顺序控制需要提供两路有相位差的控制信号,对两路控制信号的要求比较高;增加辅助结构基于经验进行设计,这使得结构不具有可计算性,主动控制性较差。因此提出一种简单有效的实现线性平滑运动方法和驱动器是值得深入研究和亟待解决的问题。
技术实现要素:
4.本发明的目的在于提供一种复合粘滑与冲击的多模式驱动器及线性平滑运动实现方法。将粘滑与冲击刚性连接设计一个集成式柔顺机构,提出的一种具有三种工作模式的多模式驱动器,具备一个驱动器在多种场景下工作的功能,增加驱动器对环境的适应性;基于用冲击位移弥补回退运动的思想,当分别调节粘滑与冲击的电压幅值,使冲击的冲击位移等于粘滑的回退位移,实现驱动器线性平滑运动。
5.本发明的上述目的通过以下技术方案实现:
6.一种复合粘滑和冲击的多模式驱动器由运动单元1、摩擦轨道2、预加载机构3、基板4和质量块5组成;摩擦轨道2安装于预加载机构3上,预加载机构3固定在基板4上;
7.所述的运动单元1包括集成式柔顺机构1-1、压电叠堆a 1-2、压电叠堆b 1-3、楔形块1-4、连接板1-5、导向滑组1-6;所述的集成式柔顺机构1-1包括粘滑部分的杠杆放大柔顺机构1-1-1和冲击部分的蝶形放大柔顺机构1-1-2,两部分刚性连接集成为一个整体;用楔形块1-4将压电叠堆a 1-2和压电叠堆b 1-3分别预紧安装在杠杆放大柔顺机构1-1-1和蝶形放大柔顺机构1-1-2的凹槽内;连接板1-5上下分别用螺钉连接集成式柔顺机构1-1和导向滑组1-6的滑块;导向滑组1-6的导轨用螺钉安装在基座上;
8.所述的集成式柔顺机构1-1的杠杆前端作为驱动足与摩擦轨道2接触,通过旋转预
加载机构3的旋钮进行预紧。
9.所述的复合粘滑和冲击的多模式驱动器的三种工作模式的实现方式分别如下:
10.a)当单独对压电叠堆a 1-2施加激励电压时,仅杠杆放大柔顺机构1-1-1受力变形,驱动器在摩擦力作用下运动,为惯性粘滑模式的工作模式;
11.b)当单独对压电叠堆b 1-3施加激励电压时,仅蝶形放大柔顺机构1-1-2受力变形,驱动器在惯性力作用下运动,为惯性冲击模式的工作模式;
12.c)当同时对压电叠堆a 1-2和压电叠堆b 1-3同时施加激励电压时,杠杆放大柔顺机构1-1-1和蝶形放大柔顺机构1-1-2同时变形,驱动器受摩擦力和惯性力的共同作用产生位移,为复合驱动模式。
13.一种用冲击弥补回退以实现线性平滑运动的方法如下:
14.a)在电压激励下,粘滑式驱动器在“滑阶段”产生回退位移δd;
15.b)在电压激励下,冲击式驱动器在“冲击阶段”产生冲击位移s
冲击
;
16.c)施加同频同相的电压激励下,将粘滑式驱动器和冲击式驱动器的输出位移进行复合,得到复合位移δs=s
冲击-δd;
17.d)在固定幅值的粘滑的激励电压下,调节冲击的激励电压的幅值,使δs=0,即用冲击位移弥补回退运动实现线性平滑运动。
18.多模式驱动器的实现线性平滑运动的具体实现过程包括以下步骤:
19.a)对压电叠堆a 1-2和压电叠堆b 1-3分别连接输入端电压,两个电压输入信号同频和同相;调节压电叠堆a 1-2的接入电压幅值为ua,压电叠堆b 1-3的接入电压幅值为ub;
20.b)空载下,压电叠堆a 1-2的电压为u
a-f
时,驱动器的粘滑部分产生步进位移s1和回退位移δd;压电叠堆b 1-3的电压为u
b-f
时,驱动器的冲击部分产生δs的冲击位移;在此电压下,满足冲击位移等于回退位移,即δs=δd,实现驱动器在空载下的线性平滑运动;
21.c)在驱动器的负载能力内,当调节压电叠堆a 1-2和压电叠堆b 1-3的电压幅值分别为u
a-l
、u
b-l
时,满足冲击位移等于回退位移,即δ’s=δ’d,实现负载下的线性平滑运动;
22.d)通过施加连续的周期性电压,实现驱动器的连续的线性平滑运动。
23.本发明的有一效果在于:利用冲击位移来弥补回退位移,抑制回退运动实现线性平滑运动,改善了目前实现平滑运动的超声磨损、舍弃负载能力和控制复杂等缺点;多模式驱动器具有粘滑模式、冲击模式和复合驱动模式三种工作模式,可以实现一个驱动器在多种场景下工作,增加驱动器对环境的适应性,拓展驱动器的实用性和应用领域。
附图说明
24.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实例及其说明用于解释本发明,并不构成对本发明的不当限定。
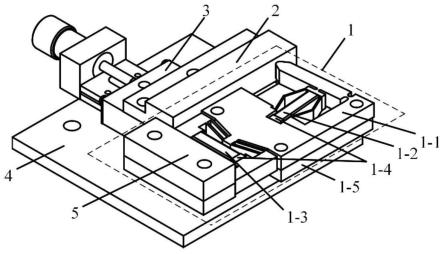
25.图1为本发明的复合粘滑和冲击的多模式驱动器的立体结构示意图;
26.图2为本发明多模式驱动器的运动单元的立体结构示意图;
27.图3为本发明的多模式驱动器的集成式柔顺机构的立体结构示意图;
28.图4为一种用冲击位移弥补回退运动以实现线性平滑运动的方法的实现原理图;
29.图5为本发明的多模式驱动器在空载下的输出特性;
30.图6为本发明的多模式驱动器在1n负载下的输出特性;
31.图中:1、运动单元;1-1、集成式柔顺机构;1-1-1、杠杆放大柔顺机构;1-1-2、蝶形放大柔顺机构;1-2、压电叠堆a;1-3、压电叠堆b;1-4、楔形块;1-5、连接板;1-6、导向滑组;2、摩擦轨道;3、预加载机构;4、基板;5、质量块。
具体实施方式
32.下面结合附图进一步说明本发明的详细内容及其具体实施方式。
33.参见图1所示,本发明的一种复合粘滑和冲击的多模式驱动器由运动单元1、摩擦轨道2、预加载机构3、基板4和质量块5组成;摩擦轨道2安装于预加载机构3上,预加载机构3固定在基板4上;
34.参见图2和图3所示,所述的运动单元1包括集成式柔顺机构1-1、压电叠堆a 1-2、压电叠堆b 1-3、楔形块1-4、连接板1-5、导向滑组1-6;所述的集成式柔顺机构1-1包括粘滑部分的杠杆放大柔顺机构1-1-1和冲击部分的蝶形放大柔顺机构1-1-2,两部分刚性连接集成为一个整体;用楔形块1-4将压电叠堆a 1-2和压电叠堆b 1-3分别预紧安装在杠杆放大柔顺机构1-1-1和蝶形放大柔顺机构1-1-2的凹槽内;连接板1-5上下分别用螺钉连接集成式柔顺机构1-1和导向滑组1-6的滑块;导向滑组1-6的导轨用螺钉安装在基座上;
35.所述的集成式柔顺机构1-1的杠杆前端作为驱动足与摩擦轨道2接触,通过旋转预加载机构3的旋钮进行预紧。
36.参见图1至图3的驱动器立体结构,复合粘滑和冲击的多模式驱动器的三种工作模式的实现方式分别如下:
37.a)当单独对压电叠堆a 1-2施加激励电压时,仅杠杆放大柔顺机构1-1-1受力变形,驱动器在摩擦力作用下运动,为惯性粘滑模式的工作模式;
38.b)当单独对压电叠堆b 1-3施加激励电压时,仅蝶形放大柔顺机构1-1-2受力变形,驱动器在惯性力作用下运动,为惯性冲击模式的工作模式;
39.c)当同时对压电叠堆a 1-2和压电叠堆b 1-3同时施加激励电压时,杠杆放大柔顺机构1-1-1和蝶形放大柔顺机构1-1-2同时变形,驱动器受摩擦力和惯性力的共同作用产生位移,为复合驱动模式。
40.参见图4所示,一种用冲击弥补回退以实现线性平滑运动的方法如下:
41.a)在电压激励下,粘滑式驱动器在“滑阶段”产生回退位移δd;
42.b)在电压激励下,冲击式驱动器在“冲击阶段”产生冲击位移s
冲击
;
43.c)施加同频同相的电压激励下,将粘滑式驱动器和冲击式驱动器的输出位移进行复合,得到复合位移δs=s
冲击-δd;
44.d)压电叠堆的输出位移δl=nd
33
u,式中n为压电陶瓷层数,d
33
为压电常数,u为激励电压;
45.所以冲击位移x
冲击
=λ
冲击
×
δl=nλ
冲击d33
u,式中λ
冲击
为冲击驱动器的输出放大比,可以看出冲击位移正比于激励电压值,即x
冲击
∝
u,所以可以通过调节电压值改变冲击位移的大小;
46.在固定幅值的粘滑的激励电压下,调节冲击的激励电压的幅值,使δs=0,即用冲击位移弥补回退运动实现线性平滑运动。
47.参见图5和图6所示,空载下,压电叠堆a 1-2的电压为u
a-f
时,驱动器的粘滑部分产
生步进位移s1和回退位移δd;压电叠堆b 1-3的电压为u
b-f
时,驱动器的冲击部分产生δs的冲击位移;在此电压下,满足冲击位移等于回退位移,即δs=δd,实现驱动器在空载下的线性平滑运动;在驱动器的负载能力内,当调节压电叠堆a 1-2和压电叠堆b 1-3的电压幅值分别为u
a-l
、u
b-l
时,满足冲击位移等于回退位移,即δ’s=δ’d,实现负载下的线性平滑运动;通过施加连续的周期性电压,实现驱动器的连续的线性平滑运动。
48.参见图5所示,多模式驱动器在空载状态下,压电叠堆a的电压幅值为100v,改变压电叠堆b的电压幅值后得到的位移输出特性,可以看出当电压为20v~30v时,位移曲线有良好的线性平滑度。
49.参见图6所示,多模式驱动器在1n负载状态下,压电叠堆a的电压幅值为100v,改变压电叠堆b的电压幅值后得到的位移输出特性,可以看出当电压为90v~100v时,位移曲线有良好的线性平滑度。
50.以上所述仅为本发明的优选实例而已,并不用于限制本发明,对于本领域的技术人员来说本发明可以有各种更改和变化。凡对本发明所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1