用于电气连接柜的功能模块和包括其的电气连接柜的制作方法
1.本发明涉及一种用于电气连接柜的功能模块以及一种包括这种功能模块的电气连接柜。
背景技术:
2.在工业电气柜领域,已知的做法是在电气连接柜中安装一个或多个监测和控制单元。这些监测和控制单元中的每一个都可以将电气柜连接到电马达并控制该电马达。使用保护单元来保护每个监测和控制单元也是已知的实践,每个保护单元使得可以向监测和控制单元供电,并且电保护该监测和控制单元以及与其连接的电马达。这些保护单元集成在监测和控制单元中。这种架构的缺点是昂贵,因为它需要使用与监测和控制单元一样多的保护单元,并且这种保护单元是昂贵的。
3.文件ep-a-2 557 643描述了一种马达控制电气柜,其包括四组马达启动子单元,每组包括短路保护装置,保护该组中的所有子单元。所有子单位都是相同的。这种方法通常可以满足保护单元的共同使用,但不是模块化的,因此不允许控制柜容易地适应每个安装的需要。
技术实现要素:
4.本发明更具体地旨在通过提出一种功能模块来克服这些缺点,该功能模块使得可通过使电气连接柜模块化来改进其架构。
5.为此,本发明涉及一种用于电气连接柜的功能模块,包括:
[0006]-一个或多个监测和控制单元,
[0007]-所有监测和控制单元共用的保护单元,向所有监测和控制单元供电,并对所有监测和控制单元进行电气保护。
[0008]
根据本发明,功能模块还包括:
[0009]-计算机总线段,配置为将所有监测和控制单元连接到工业计算机,
[0010]-与监测和控制单元一样多的外部连接模块,每个外部连接模块被配置为将电气连接柜外部的电气负载连接到监测和控制单元,并从该监测和控制单元向该电气负载供电,
[0011]-与监测和控制单元一样多的输入输出模块,每个输入输出模块被配置为将计算机总线段连接到监测和控制单元以及连接到该监测和控制单元的电气负载,并且允许在一方面的所述电气负载和另一方面的所述监测和控制单元以及计算机总线段之间交换操作数据,以及
[0012]-支撑结构,其上固定有保护单元、计算机总线段、每个监测和控制单元、每个输入输出模块和每个外部连接模块。
[0013]
此外,监测和控制单元的高度可以等于1u、2u、3u、4u、5u或6u,“u”表示对应于监测和控制单元的基本高度的单元高度,并且功能模块具有等于6u的主高度,并且可以容纳监
测和控制单元的任何技术上允许的组合,取决于这些控制单元的高度,实际上在一个和六个控制单元之间。
[0014]
根据本发明,可以将多个监测和控制单元组合在一个功能模块中,并在该功能模块中使用多个监测和控制单元共用的一个保护单元。功能模块的尺寸是恒定的,这使得易于集成到电气柜中,并且在功能模块中安装各种监测和控制单元组合的可能性使得易于使功能模块适应电气柜中的特定安装要求。
[0015]
根据本发明的一些有利但非强制性的方面,功能模块单独或以任何技术上允许的组合结合了一个或多个以下特征:
[0016]-每个监测和控制单元一方面与保护单元交换操作数据,另一方面与计算机总线段交换操作数据。
[0017]-计算机总线段包括允许在每个监测和控制单元和工业计算机之间交换操作数据的电子电路,并且包括传送至少一个辅助电压的电源轨道。
[0018]-每个监测和控制单元都是监测和控制抽屉,可以通过滑动插入功能模块或从中移除。
[0019]-每个监测和控制抽屉可以在抽屉的操作位置和抽屉的断开位置之间在功能模块中移动,并且每个监测和控制抽屉仅在抽屉的操作位置由保护单元供电和电保护。
[0020]-每个输入输出模块包括第一无线通信板,每个监测和控制单元包括第二无线通信板,并且第一和第二无线通信板允许输入输出模块和监测和控制单元之间的数据交换。
[0021]-功能模块是马达启动模块。
[0022]
根据另一方面,本发明还涉及一种包括至少两个如上所述的功能模块的电气连接柜。
[0023]
根据本发明,电气连接柜包括连接到工业计算机的通信模块,两个功能模块的计算机总线段被插入并且彼此电连接并且一起形成计算机总线,并且通信模块通过计算机总线与每个功能模块的每个监测和控制单元连接。
[0024]
这种电气连接柜具有与上述本发明的功能模块相同的优点。
附图说明
[0025]
根据下面对电气连接柜和根据其原理的功能模块的一个实施例的描述,本发明将被更好地理解,并且其其他优点将变得更加明显,这些描述仅通过示例并参考附图给出,其中:
[0026]
图1是根据本发明的电气柜的透视图;
[0027]
图2是图1的电气柜沿平面ii的纵向剖视图;
[0028]
图3是沿着平面iii的图1的电气柜的一部分的水平剖视图;
[0029]
图4是根据本发明的第二电气柜的类似于图3的水平剖视图;
[0030]
图5是根据本发明的第三电气柜的类似于图3的水平剖视图;
[0031]
图6是属于根据图1至5之一的柜的通信模块的透视图;
[0032]
图7是图6的通信模块的俯视图;
[0033]
图8是属于根据图1至5之一的柜的一个马达启动模块的透视图,该模块是根据本发明的;
[0034]
图9是从另一个角度观察的根据本发明的另一个马达启动模块的透视图;
[0035]
图10是用于图8和9的马达启动模块的支撑结构的透视图;
[0036]
图11是用于图8和9的马达启动模块的保护单元的透视图;
[0037]
图12是从另一个角度观察的图11的保护单元的透视图;
[0038]
图13是属于根据图1至5之一的柜的监测和控制单元的透视图;
[0039]
图14是从另一个角度观察的图13的监测和控制单元的透视图;
[0040]
图15是属于根据图1至5之一的柜的第二监测和控制单元的透视图;
[0041]
图16是从另一个角度观察的图15的第二监测和控制单元的透视图;
[0042]
图17是沿图15中的平面xvii剖开的图15的第二监测和控制单元的俯视图;
[0043]
图18是属于根据图1至5之一的柜的移动侧向触头的透视图;
[0044]
图19是从另一个角度观察的图18的移动侧向触头的透视图;
[0045]
图20是图18和19的移动侧向触头的分解透视图;
[0046]
图21是图18和19的移动侧向触头在第一位置的俯视图;
[0047]
图22是图18和19的移动侧向触头在第二位置的俯视图;
[0048]
图23是图18和19的移动侧向触头在第三位置的俯视图;
[0049]
图24是属于根据图1至5之一的柜的输入输出模块的透视图;
[0050]
图25是属于根据图1至图5之一的柜的计算机总线段的透视图,其中部分被剖开;
[0051]
图26是图25的细节xxv的视图;
[0052]
图27是计算机总线连接器的透视图;
[0053]
图28是属于根据图1至5之一的柜的第一外部连接模块的透视图;
[0054]
图29是图28的第一外部连接模块的分解透视图;
[0055]
图30是属于根据图1至5之一的柜的第二外部连接模块的透视图;
[0056]
图31是图30的第二外部连接模块的分解透视图;
[0057]
图32是属于根据图1至5之一的柜的第三外部连接模块的透视图;
[0058]
图33是图32的第三外部连接模块的分解透视图;
[0059]
图34是配备有三个跳线的图25和26的计算机总线段的透视图;
[0060]
图35是图34的跳线的透视图;
[0061]
图36是处于第一位置的图15至17的监测和控制抽屉的锁定系统的详细视图;
[0062]
图37是处于第二位置的图15至17的监测和控制抽屉的锁定系统的详细视图;
[0063]
图38是图36的锁定系统的透视图,其中抽屉的一部分被隐藏,并且还示出了属于根据图1至5之一的柜的导轨;
[0064]
图39是图37的锁定系统的透视图,其中抽屉的一部分被隐藏,并且还示出了属于根据图1至5之一的柜的导轨;
[0065]
图40是图37的锁定系统的透视图,其中抽屉的一部分被隐藏;
[0066]
图41是属于根据图1至5之一的柜的第三监测和控制抽屉的透视图,该第三抽屉是根据本发明的;
[0067]
图42是从另一个角度观察的图41的监测和控制抽屉的透视图;和
[0068]
图43是属于图41和42的监测和控制抽屉的位置检测模块的透视图。
具体实施方式
[0069]
图1至5中示出了电气柜100。该电气柜旨在集成到电气网络中(部分示出)。该电气网络一方面包括电气柜100上游的例如来自变电站的供电电缆102,另一方面包括电气柜下游的一个或多个电气负载104。
[0070]
电气柜100是配置成将电气负载104连接到供电电缆102的连接柜。
[0071]
在电气柜100的安装配置中,柜搁置在由平面p1表示的水平表面上。实际上,平面p1例如是安装电气柜100的建筑物的地板。
[0072]
电气柜100的纵向x轴被定义为电气柜100的最大尺寸的轴,实际上是其长度,横向y轴被定义为电气柜100的最小尺寸的轴并垂直于x轴,实际上是其宽度,竖直z轴被定义为包括x轴和y轴的正交坐标系的第三轴。
[0073]
x轴、y轴和z轴的取向与电气柜100的取向刚性连接。在本公开中描述的电气柜100的取向对应于其安装配置。因此,应当理解,当电气柜100的取向变化时,x轴、y轴和z轴的取向也变化。例如,当柜100不处于安装配置时,例如当它被运输时,z轴可能不是竖直的。贯穿本公开其余部分使用的修饰语“顶部”、“底部”和“竖直”是相对于z轴而言的。
[0074]
在这里描述的安装配置中,由x轴和y轴形成的平面是水平的并且平行于平面p1,而z轴垂直于该平面。贯穿本公开其余部分使用的修饰语“水平”适用于在电气柜100的安装配置中,包含在平行于由x轴和y轴形成的平面的平面中的任何元件。修饰语“左”和“右”表示相对于x轴,修饰语“前”和“后”表示相对于y轴。
[0075]
下面描述的部件的相对位置和它们的取向仅作为例子给出,而不是限制性的。除非另外明确提及,否则它们意味着电气柜100的已装配和已安装配置。因此,当提到部件相对于x轴、y轴和/或z轴的取向时,它指的是柜的安装配置。在其他例子中,当存储、运输、拆卸或组装柜100时,部件的取向和它们的相对位置可以变化。
[0076]“f1”表示柜100的正面,“f2”表示其背面,“f3”表示其下面,“f4”表示其上面,“f5”表示其左面,“f6”表示其右面。这些面f1至f6总体上是平面的。实际上,柜的面f3因此布置在平面p1上。
[0077]
供电电缆102向电气柜100输送主电源,该主电源优选具有400v的电压,并且是具有中性线的三相电源,优选频率为50hz。作为一种变型,供电电缆102输送不带中性线的三相电流或单相电流。
[0078]
电气负载104例如可以是电马达,例如三相电马达、配电网络或可驱动的电气负载,例如电池或光伏板。
[0079]
如图1所示,电气柜100包括电源柱106、至少一个配电柱108和至少一个连接柱110。
[0080]
电源柱106、配电柱108和连接柱110沿着x轴并置。
[0081]
在所示的示例中,电气柜100包括配电柱108和两个连接柱110,这两个连接柱110布置在配电柱108的两侧。实际上,连接柱110总是与配电柱108并置。配电柱108总是与一个或两个连接柱110并置。
[0082]
如图3所示,配电柱108和一个或两个连接柱110的结合形成了功能柱111。当功能柱111包括两个连接柱110时,这两个柱分别位于配电柱108的两侧,即图1至5中的左侧和右侧。当功能柱111仅包括一个连接柱110时,该柱不加区别地位于配电柱108的一侧或另一
侧,即图1至5中的左侧或右侧。
[0083]
功能柱111的另外两个实施例在图4和5中可见,并在下面描述。
[0084]
在图1至3所示的例子中,电气柜100包括一个功能柱111。
[0085]
作为本发明的变型(未示出),电气柜100包括沿x轴并置的多个功能柱111。
[0086]
在所示的示例中,功能柱111具有沿z轴测量的2000mm的高度h1。作为变型,该高度是不同的,例如1500mm或2500mm
[0087]
高度h1也对应于电气柜100的高度。
[0088]
电源柱106使得从供电电缆102向所有电气柜100供电成为可能。优选地,电源柱布置在柜100的一个纵向端,如所示的例子,其中电源柱在柜100的左侧。
[0089]
如图2所示,在电源柱106中,供电电缆102的每一相和中性线连接到断路器112的输入端。
[0090]
如图2和3所示,电源柱106还包括一组电源母线114,其包括多个电源母线116。断路器112的每个输出连接到电源母线116。因此,在电气柜100供应有带中性线的三相电流的示例中,柱106的该一组母线114包括四个电源母线116,对应于供电电流的三相和中性线。
[0091]
一组电源母线114连接到一组水平母线118。一组水平母线118包括多个水平母线120,实际上水平母线120和母线116的数量相同。因此,一组电源母线114的每个母线116连接到一组水平母线118的母线120。
[0092]
一组水平母线118沿着电气柜100的纵向x轴延伸,并且使得可以向柜的每个配电柱108供电。水平导管119沿着电气柜100的整个长度产生,并且容纳一组水平母线118。
[0093]
在图1至3的例子中,水平导管119位于电气柜100的顶端。作为本发明的变型(未示出),水平导管119位于电气柜100的底端。
[0094]
每个配电柱108包括一组竖直母线122,这使得可以向与每个配电柱108相邻的那个连接柱110或每个连接柱110供电。在所示的例子中,柜100因此包括一组竖直母线,这使得可以向两个连接柱110供电。
[0095]
每组竖直母线122包括多个竖直母线124,实际上竖直母线124和水平母线120的数量相同。每个竖直母线124连接到水平母线120。一组竖直母线122与一组水平母线118的连接发生在水平导管119中。
[0096]
电源母线116、水平母线120和竖直母线124由导电材料制成,例如铜,并且优选为扁平母线。优选地,它们具有250至3000mm2之间的横截面。
[0097]
对于每个配电柱108,电源母线116、水平母线120和竖直母线124的组装形成供电线路。
[0098]
在所示的例子中,柜100包括四条供电线,对应于来自电缆102的供电电流的三相和中性线。其他变型也是可以想到的,例如供给单相电流或没有中性线的三相电流的电气柜100,对于每一组母线,分别包括两个母线和三个母线。
[0099]
断路器112连接在供电电缆102和供电线之间,因此可以切断对每条供电线的供电。断路器112因此是用于保护电气柜100的保护构件。
[0100]
每个连接柱110允许一个或多个电气负载104电连接到电气柜100,并且使得可以监测连接到其上的电气负载104。
[0101]
每个连接柱110包括水平导管119的一部分。水平导管119的这部分沿着x轴在连接
柱110的整个长度上延伸,并且容纳一组水平母线118的一部分。
[0102]
电气柜100由工业计算机130监测,为了附图清楚起见,仅在图2中示出,该工业计算机通过通信电缆132连接到电气柜。该工业计算机使得控制连接柱110成为可能。
[0103]
实际上,工业计算机130包括执行用于管理电气柜100的软件的计算单元(未示出)。
[0104]
作为变型,工业计算机130被实时监督控制和数据采集或“scada”系统代替,该系统监督电气柜100的操作,或者计算机被集成到这样的系统中。
[0105]
每个连接柱110包括通信模块134。如图2所示,通信模块134靠近连接柱110的顶端,并靠近水平导管119定位。
[0106]
作为本发明的变型(未示出),通信模块134位于柱的底端。
[0107]
作为本发明的变型(未示出),当水平导管119位于电气柜100的底端时,通信模块134可以位于连接柱110的顶端,或者靠近柱的底端,在水平导管上方。
[0108]
通信模块134使得可以集中来自连接柱110的所有信息并控制连接柱。这些信息的内容和作用将在下面详细描述。
[0109]
通信模块134经由通信电缆132与工业计算机130通信,一方面传输关于连接柱110的操作的信息,另一方面从工业计算机接收必须传输到连接柱的命令。
[0110]
连接柱110的通信模块134因此充当工业计算机130和该连接柱110之间的中介,并且使得可以集中计算机和柱之间的交换。
[0111]
如图6所示,每个通信模块134实际上包括受控网络交换机135,称为“管理交换机”。
[0112]
当电气柜100包括多个连接柱110时,如图1至3所示的例子,每个连接柱的通信模块134通过内部通信电缆136彼此串联连接。实际上,是通信模块的管理交换机135通过内部通信电缆136相互连接。
[0113]
此外,在这种配置中,通信模块134的管理交换机都通过内部通信电缆136连接到中央交换机137,中央交换机137优选地布置在电源柱106中。该中央交换机137充当通信模块134和工业计算机130之间的中介,即,来自工业计算机130的信息(例如命令)通过中央交换机137在通信模块之间分发,并且来自通信模块134的信息在被传输到工业计算机之前通过中央交换机聚集。
[0114]
因此,每个管理交换机135独立于其他管理交换机135连接到工业计算机130。
[0115]
这种配置具有使电气柜100的操作更可靠的优点。具体地说,在通信模块134发生故障的情况下,只有包括该模块的连接柱110的操作会受到影响,因为其它无故障模块互连并连接到中央交换机137,它们与工业计算机130的连接不会被故障模块中断。
[0116]
作为变型,当电气柜100包括多个连接柱110时,每个通信模块134的管理交换机135直接连接到工业计算机,而不经过交换机137类型的交换机。
[0117]
可选地,当电气柜100仅包括一个连接柱110时,中央交换机137布置在通信模块和工业计算机之间。
[0118]
在所示的例子中,内部通信电缆136是使用以太网协议的电缆。作为变型,内部通信电缆136使用另一种局域网协议,例如modbus或profinet协议。
[0119]
为了允许电气负载104的连接,每个连接柱110包括一个或多个监测和控制单元
138。
[0120]
因为电气负载104远离柜100,所以它们与监测和控制单元138的连接通过连接电缆139进行。
[0121]
在所示的例子中,监测和控制单元138是监测和控制抽屉,其因此可以简单且快速地安装在连接柱110中以及从连接柱110移除。作为本发明的变型(未示出),监测和控制单元138是柜的固定单元,其在柜的安装期间被组装,例如通过拧入一个或多个柱110中。
[0122]
实际上,监测和控制单元138允许电气负载104的电连接。
[0123]
在所示的示例中,连接柱110包括多达三十个监测和控制单元138,因此允许最多三十个电气负载104的连接。连接柱110是模块化的,即可以在其中安装所需数量的监测和控制单元,在一个单元和三十个单元之间。监测和控制单元138在连接柱110中竖直并置。
[0124]
作为变型,连接柱110可以包括三十个以上的监测和控制单元138,例如如果监测和控制单元的高度降低或者如果连接柱110的高度增加。
[0125]
监测和控制单元138还允许控制它们所连接的电力负载104。当电气负载是电马达时,这种控制(也称为驱动)例如包括驱动该电马达,即启动它、停止它并可能控制它的速度,或者当电气负载是配电网络时,包括输送该配电网络正常运行所需的电压和电流。
[0126]
此外,监测和控制单元138还允许监视它们所连接的电气负载104。这种监视包括例如测量传送到负载104的电压和电流,或者当负载104是马达时,从诸如位置或转速传感器或温度传感器的传感器中检索信息。
[0127]
因此,每个监测和控制单元138可以具有连接电气负载104、控制该负载和监测该负载的作用。然而,取决于连接到监测和控制单元138的电气负载104的类型,该监测和控制单元可能不具有驱动该负载的作用,或者可能不具有控制该负载的作用。
[0128]
如图2和3所示,每个连接柱110包括一个或多个保护单元140。每个保护单元140配置为电保护一个或多个监测和控制单元138以及连接到这些监测和控制单元的电气负载104,特别是在电气负载104出现故障的情况下,例如短路。
[0129]
保护单元140例如是布置在监测和控制单元138上游的断路器,并且使得在发生事故的情况下,例如在短路的情况下,能够中断经由监测和控制单元138供给负载104的电流。换句话说,保护单元140控制对监测和控制单元138的电力供应。
[0130]
因此,功能柱111的保护单元140布置在监测和控制单元138与该功能柱111的配电柱108的一组竖直母线122之间,并且使得可以从所述一组竖直母线122向这些监测和控制单元138供电。保护单元140与一组竖直母线122的电连接以已知的方式发生,例如经由一组水平刚性母线、一组柔性母线或经由电缆(未示出)。
[0131]
换句话说,一组竖直母线122是每个保护单元140的电源。
[0132]
在保护单元140是断路器的情况下,其电连接和操作与断路器112相同。
[0133]
每个保护单元140保护一个或多个监测和控制单元138。
[0134]
如图2所示,每个连接柱110包括计算机总线142,其将连接柱的通信模块134连接到该柱的所有监测和控制单元138。每个监测和控制单元138因此连接到通信模块134。
[0135]
在所示的例子中,计算机总线142是包括电路板的壳体,电路板即细长形状的印刷电路板,竖直布置在连接柱110中。该电路板包括图25中可见的电子电路144或轨道,允许例如使用以太网协议从每个监测和控制单元138到通信模块134的管理交换机135以及从通信
模块的管理交换机到每个监测和控制单元的通信,即数据交换。换句话说,这些数据传输通过计算机总线142的电子电路144。
[0136]
借助于计算机总线142,每个连接柱110的管理交换机135控制该连接柱的每个监测和控制单元138,并且聚集来自监测和控制单元的数据。
[0137]
监测和控制单元138连接到计算机总线142。
[0138]
每个计算机总线142还包括图25中可见的供电轨道148,其被配置为传导第一辅助电压,这使得可以向监测和控制单元138提供第一辅助电压,该第一辅助电压是监测和控制单元138的某些部件的操作所需要的,下面将详细描述。该第一辅助电压来自每个连接柱110的通信模块134。该第一辅助电压例如是48v的dc电压。
[0139]
作为变型,第一辅助电压是另一值的电压,例如12v、24v、110v dc或110v ac。
[0140]
为了传递该第一辅助电压,通信模块134包括至少一个电源块150。
[0141]
当电气柜100包括多个连接柱110时,每个通信模块134包括至少一个电源块150。
[0142]
可选地,每个通信模块134包括具有冗余的两个电源块150,类似于图6和7所示的例子。这种配置是有利的,因为在电源块150发生故障的情况下,包含该块的通信模块134的操作和包含该模块的连接柱110的操作不会中断。
[0143]
每个计算机总线142还包括图25中可见的供电轨道154,其配置为传导第二辅助电压,该第二辅助电压优选为230v的ac电压。该第二辅助电压向电气负载104供电。该第二辅助电压来自每个连接柱110的通信模块134。
[0144]
在一个示例性实施例中,计算机总线142是具有六层的印刷电路板,供电轨道148和154以及电子电路144分布在这六层之间。作为变型,计算机总线142包括不同数量的层。
[0145]
作为变型,计算机总线142的供电轨道148和154由附接到计算机总线的电缆代替。
[0146]
借助于计算机总线142,可以在物理单个支撑件上集中将连接柱110的通信模块134连接到该柱的监测和控制单元138的通信电路以及第一和第二辅助电路。
[0147]
图3示出了图1和2的电气柜100的功能柱111的内部布置。特别地,图3示出了每个连接柱110包括的不同区域,即:
[0148]-功能区域156,其包括监测和控制单元138以及保护单元140,并且其邻近配电柱108,使得保护单元140布置在配电柱与监测和控制单元之间;
[0149]-连接区域158,电气负载104到监测和控制单元138的连接发生在该连接区域中,并且该连接区域与功能区域156相邻;
[0150]-布线区域160,所有连接电缆139布置在该布线区域中,并且该布线区域邻近连接区域158;和
[0151]-热管理区域162,其作用如下所述。
[0152]
实际上,功能区域156和连接区域158位于连接柱110的前部,即在柜的面f1附近,并且布线区域160占据连接柱的整个宽度,该宽度对应于柜100的宽度,即从其正面f1到其背面f2。
[0153]
实际上,热管理区域162位于连接柱110的背部,在背面f2附近,并且纵向地,即沿着x轴,从配电柱108向上延伸到布线区域160。
[0154]
作为变型,功能柱111不包括布线区域160,并且所有连接电缆139都布置在连接区域158中。
[0155]
应当理解,左侧连接柱110的内部布置和右侧连接柱110的内部布置相对于对称平面p2对称,该对称平面平行于由y轴和z轴形成并穿过配电柱108的中心的竖直平面。
[0156]
功能区域156在比高度h1更短的高度h2上延伸,这使得可以将通信模块134安装在功能区域156上方,如图1至3中所示的示例,或者安装在该区域下方。
[0157]
当连接柱110包括最大数量的监测和控制单元138时,例如在所示的示例中为30个单元,则这些监测和控制单元占据了功能区域156的大部分。
[0158]
当连接柱110不包括最大数量的监测和控制单元138时,功能区域156没有被监测和控制单元完全占据,而是包括自由空间。在这种配置中,通信模块134也可以安装在功能区域156的自由空间中。
[0159]
在所示的例子中,高度h2是1500mm;作为变型,它可以是不同的。
[0160]
连接区域158在比高度h1短且比高度h2大的高度h3上延伸。实际上,高度h3等于高度h2和通信模块134的高度之和。另外,计算机总线142的高度等于高度h3。
[0161]
在所示的例子中,高度h3是1600mm。
[0162]
布线区域160和热管理区域162在功能柱111的整个高度h1上延伸。实际上,水平导管119因此穿过布线区域160。
[0163]
此外,水平导管119优选在功能区域156和连接区域158的上方或下方穿过,以便不穿过热管理区域162。
[0164]
在该配置中,连接电缆139与监测和控制单元138的连接经由柜100的正面f1进行。
[0165]
优选地,在这种配置中,功能柱111的宽度,以及因此柜100的宽度,由“l1”表示,是600mm。布线区域160的宽度因此也是600mm。此外,功能区域156和连接区域158的宽度,由“l2”表示,优选地是400mm。在这种配置中,热管理区域162的宽度,由“l3”表示,因此是200mm。
[0166]
图4示出了具有功能柱111的柜100的第二实施例的内部布置。该第二实施例与图1至3的实施例的不同之处在于,功能柱111的宽度l1等于宽度l2,并且连接柱110不包括热管理区域162。除了等于宽度l2的布线区域160的宽度之外,功能区域156、连接区域158和布线区域160的布置与功能柱111的第一配置中这些区域的布置相同。作为变型,第二实施例的功能柱111不包括布线区域160,并且所有的连接电缆139都布置在连接区域158中。
[0167]
图5示出了具有功能柱111的柜100的第三实施例的内部布置。该第三实施例与图1至3的实施例的不同之处在于,连接电缆139与监测和控制单元138的连接是通过柜100的背面f2进行的。因此,功能柱111不包括专用布线区域160,并且连接是在热管理区域162中进行。宽度l1、l2和l3与图1至3的实施例中的相同。
[0168]
从图3至图5的比较中可以明显看出,功能柱111的内部布置是可适应性的,这赋予电气柜100更大的模块性。
[0169]
特别地,功能柱111的布置使得可以选择经由柜100的前部或者经由柜100的背部连接连接电缆139。
[0170]
优选地,在柜100中,所有功能柱111的宽度等于l1或l2,并且电源柱106的宽度被选择为等于功能柱的宽度。
[0171]
作为变型,在电气柜100中,一些功能柱111具有等于l1的宽度,而其他功能柱具有等于l2的宽度是可能的。
[0172]
根据柜100的高度,内部通信电缆136优选位于一组水平母线118的对面,以避免任何电磁干扰。实际上,这意味着,优选地,当水平导管119位于柜的底部时,电缆136位于柜100的顶部,而当水平导管位于柜的顶部时,这些电缆位于柜的底部。
[0173]
作为变型,当连接柱110的宽度l1等于600mm时,内部通信电缆136可以尽可能靠近柜100的背面f2定位,因此靠近连接柱110的背面,以便穿过热管理区域162。在这种配置中,电缆136离一组水平母线118足够远,以避免任何电磁干扰,即使当电缆和一组母线位于连接柱的顶部或底部时也如此。
[0174]
优选地,如图3所示,电源柱106的长度l1为650mm,配电柱108的长度l2为150mm,布线区域160的长度l4为300mm,功能区域156和连接区域158的长度l5为650mm。因此,长度l3为950mm。
[0175]
因此,在每个连接柱包括布线区域的配置中,包括两个连接柱110的功能柱111的长度l111优选地等于2650mm。作为变型,当没有连接柱包括布线区域160时,长度l5等于长度l3,并且功能柱111的长度l111优选地等于2050mm。
[0176]
作为变型,长度l1、l2、l3、l4、l5和l111是不同的。
[0177]
柜100实际上包括基本框架164和包层板166。
[0178]
在所示的例子中,基本框架164包括多个框架168和横向构件170,横向构件170将框架彼此连接,并且每个框架由四个杆172形成。
[0179]
在框架168的四个杆172中,两个沿着y轴布置,两个沿着z轴布置,从而形成矩形。因此,每个框架168是平行于由y轴和z轴形成的平面的矩形。
[0180]
横向构件170沿着x轴延伸,并且使得能够将框架168彼此连结。有利的是,横向构件170布置在柜100的顶端和底端,从而分别形成顶部和底部条带,这在美学上令人愉悦。
[0181]
包层板166附接到基本框架164,以便封闭柜100的正面f1、背面f2、上面f4、左面f5和右面f6。因此,柜100的内部受到保护。
[0182]
在图1的例子中,柜100在柜100的连接柱110的整个正面f1上不包括任何包层板166,使得每个通信模块134、每个监测和控制单元138和每个保护单元140的一个面可以从外部接近。作为变型,通信模块以及保护和连接单元由包层板166保护。
[0183]
每个包层板166还可以是门,其允许接近柜100的内部。包层板166可以是不透明的或透明的。图1示出了位于电源柱106和布线区域160的水平处的包层板166是不透明的情况。
[0184]
此外,当柜100具有600mm的宽度l1时,基本框架164还包括加强件174,其从柜的背面f2延伸超过200mm的距离。因此,加强件174在热管理区域162的整个宽度上延伸,直到该热管理区域与功能区域156和连接区域158之间的界面。
[0185]
在实践中,柜100的每个柱(电源柱、配电柱和连接柱)包括独立的基本框架,并且两个相邻柱的基本框架彼此连接,例如使用螺钉,这允许柜100的设计和组装的高度模块化。
[0186]
作为变型,每个功能柱111包括该功能柱111的配电柱108和一个或多个连接柱110共用的基本框架164。
[0187]
作为变型,柜100的基本框架164的设计是不同的,例如框架168形成平行于由x轴和z轴形成的平面的矩形,并且横向构件170沿着y轴延伸。
[0188]
通信模块134的细节在图6和7中可见。
[0189]
通信模块134包括正面176和背面178。
[0190]
在所示的例子中,在正面176和背面178之间,通信模块在400mm的宽度l134上延伸。
[0191]
当通信模块安装在连接柱110上时,模块的正面176处于柱和柜的正面f1的水平,模块的背面178在柜具有如图4的实施例中的400mm的宽度l2时处于柜背面的水平,或者在柜100具有类似于图1至3和5的实施例中的600mm的宽度l1时处于加强件174的水平。
[0192]
前通风格栅180和两个锁182(在图6中只能看到其中一个)制作在正面176上。锁182相对于抽屉134的中间平面π134对称地布置,并且使得通过与基本框架164协作来保持通信模块134安装在连接柱110中成为可能。它们可从柜100的外部经由其正面f1来致动。
[0193]
后通风格栅184制作在背面178上。当柜100具有400mm的宽度l2时,如图4的实施例,通风格栅184将通信模块的内部连接到柜的外部。当柜100具有600mm的宽度l3时,如图1至3和5的实施例,通风格栅184将通信模块的内部连接到热管理区域162。
[0194]
借助于前通风格栅180和后通风格栅184,通信模块134内部的空气通过自然对流被连续补充,这使得可以冷却通信模块,并且通过移除通信模块中包含的电子部件,特别是电源块150产生的热量,来维持该模块内部与其操作相适应的温度。
[0195]
实际上,空气经由前通风格栅180进入,被通信模块的电子部件加热,这使得冷却这些部件成为可能,然后经由后通风格栅184离开。
[0196]
作为变型,风扇安装在通信模块134中,以便迫使空气从模块的前部流向背部。该风扇例如安装在前通风格栅上或后通风格栅上,或者由电源块150承载。
[0197]
通信模块134的正面176包括通信模块操作的指示器185,如图1所示。这些指示器185例如是灯,其发信号通知电源块150的正确操作或故障,即第一辅助电压的提供中断。
[0198]
每个连接柱110包括附接到基本框架164的两个侧向导轨186。侧向导轨186在图6和7中示出。
[0199]
通信模块134包括从正面176延伸到背面178的两个侧面187。这些侧面187与连接柱110的侧向导轨186配合,并且使得可以将通信模块134放置在连接柱中的适当位置,并且通过像抽屉一样在平行于y轴的方向上滑动它来移除它。因此,通信模块134的安装和移除快速且容易。
[0200]
具有冗余的两个电源块150连接到电路板188。实际上,电路板188包括两个连接器189,电源块150插在连接器189上。
[0201]
电路板188使得控制两个电源块150和管理第一辅助电压成为可能。
[0202]
电路板188配置成在两个电源块150中的一个有故障的情况下,例如通过指示器185来警告该故障,但是继续管理由第二无故障的电源块传送的第一辅助电压。
[0203]
通信模块的正面176包括盖190。该盖190可从正面176移除,并且其被布置成面向两个电源块150。因此,当电路板188发出电源块150有故障的信号时,可以移除盖190以直接接近有故障的电源块,将其从通信模块134中取出,然后用正常工作的电源块替换它。因此,该替换操作在不需要从连接柱110移除通信模块134的情况下发生,这使得可以在不中断通信模块的操作的情况下执行该替换操作,该通信模块的另一个电源模块保持有效。
[0204]
在操作过程中更换电源块是有利的,因为它可以避免停止连接柱110的操作。
[0205]
此外,电路板188向管理交换机135提供第一辅助电压,以允许该交换机的操作。
[0206]
电路板188还向布置在侧面187上的第一连接器192提供第一辅助电压,这使得可以将第一辅助电压连接到柜100的另一柱,例如连接到另一连接柱110的通信模块134的第一连接器192。因此,在两个电源块150故障的情况下,通信模块134仍然由另一连接柱的通信模块134供应第一辅助电压。
[0207]
作为变型,这种连接还使得可以避免在柜100的每个通信模块134中安装电源块150。
[0208]
此外,第一连接器192向计算机总线142提供第一辅助电压。
[0209]
电路板188包括计算单元193,该计算单元193执行软件,使得可以控制管理交换机135和电源块150。实际上,电路板188和管理交换机135通过内部通信电缆(未示出)连接,例如以太网电缆。
[0210]
电源块150本身被供给第二辅助电压。因此,第二辅助电压使得可以向电源块150和电气负载104供电。
[0211]
通信模块134包括保护壳体194,其例如是断路器。保护壳体194向通信模块134供应第二辅助电压。为此,保护壳体194本身通过连接到电气柜100外部或内部的电源来供电。
[0212]
实际上,壳体194连接到第二连接器196,第二连接器196布置在与第一连接器192相同的侧面187上,这使得可以将保护壳体连接到外部或内部电源。
[0213]
作为变型,保护壳体194连接到一组竖直母线122的一个竖直母线124和中性线。通过仅连接到一组母线中的一个竖直母线和中性线,壳体194被供应了比主电源输送的电压低的电压。例如,当主电源是提供400v电压的三相电源时,通过连接到一个相和中性线获得的辅助电压是230v。
[0214]
有利的是,保护壳体194还向计算机总线142提供第二辅助电压。
[0215]
支承第一和第二连接器的侧面187还包括连接到管理交换机135的两个通信连接器198。在这两个通信连接器198中,在柜100包括多个连接柱110的情况下,第一连接器允许连接到另一连接柱110的通信模块的内部通信电缆136的连接,并且第二连接器允许连接到中央交换机137的内部通信电缆136的连接。作为变型,第一和第二连接器各自连接到另一连接柱110的通信模块,以便将三个连接柱彼此连接。作为变型,通信模块134包括除了两个之外的一定数量的通信连接器198,例如一个或三个。
[0216]
在侧向导轨186中形成开口,以便当通信模块安装在侧向导轨上时,允许接近连接器192、196和198。
[0217]
连接柱110可以配置用于多种不同的用途:
[0218]-第一配置,其中连接柱允许连接到电马达,例如三相马达。每个电马达都连接到监测和控制单元。然后,连接柱110使得可以向这些电马达供电并驱动它们。在该第一配置中,连接柱110被称为“马达启动柱”。
[0219]-第二配置,其中连接柱允许连接到下游配电电路,例如配电板或配电柜。然后,连接柱110使得可以将电力从供电电缆102分配到多个下游电路,并且保护这些下游电路,每个下游电路连接到监测和控制单元。在该第二配置中,连接柱110被称为“电流分配柱”。
[0220]-第三配置,其中连接柱允许连接到可驱动的电气负载,例如光电板或电池。每个电气负载连接到监测和控制单元138。然后,连接柱110使得可以向这些电路供电并驱动它
们。在该第三配置中,连接柱110c被称为“负载驱动柱”。
[0221]
实际上,功能区域156的配置和架构,尤其是监测和控制单元138的配置和架构,在上面列出的三种配置之间是不同的。此外,与其他用途相关联的其他配置也是可以想象的。
[0222]
以下公开详细描述了马达启动柱110的配置和架构。
[0223]
下面提到的某些元件在马达启动柱的上下文中描述,但是它们的应用不仅仅局限于它们在马达启动柱中的使用。因此,下面介绍的某些元件也可以应用于例如电流分配柱或负载驱动柱中使用的元件。
[0224]
因此,以下描述详细描述了马达启动模块200的配置和架构。
[0225]
该模块的配置和架构可转换成其他配置,例如在电流分配柱的情况下,马达启动模块对应于分配模块,该分配模块使得可以将电流分配到一个或多个下游电路并保护这些电路,或者在负载驱动柱的情况下,马达启动模块对应于驱动模块,该驱动模块使得可以向电气负载供电并驱动它们。其他用途也是可以想象的。
[0226]“功能模块”的意思是其架构可从下面描述的马达启动模块200的架构转换的任何模块,例如分配模块或驱动模块。
[0227]
马达启动柱110包括一个或多个马达启动模块200,其中一个在图8和9中可见。
[0228]
马达启动柱110的每个马达启动模块200主要位于功能区域156中,并且部分位于该马达启动柱的连接区域158中。
[0229]
当马达启动柱110包括多个马达启动模块200时,马达启动模块竖直并置。
[0230]
实际上,每个马达启动模块200包括保护单元140和至少一个监测和控制单元138。马达启动模块的每个监测和控制单元138由该马达启动模块的保护单元140电保护。
[0231]
此外,每个监测和控制单元138连接到保护该监测和控制单元的保护单元140,以便能够将关于该监测和控制单元的操作的信息传送到该保护单元。
[0232]
在所示的例子中,监测和控制单元138是抽屉,其高度可以取多个定义值。在本说明书的其余部分,监测和控制单元138因此被称为“抽屉138”。因此,抽屉的基础高度被定义为单位高度,用“u”表示。抽屉的高度可以等于该基础高度的整数倍,最大为单位高度u的六倍。
[0233]
因此,抽屉138可以占据1u、2u、3u、4u、5u或6u的高度。
[0234]
优选地,单位高度u等于50mm。因此,在该示例中,高度为6u的抽屉138将具有300mm的高度。
[0235]
每个马达启动模块200具有由“h4”表示的等于6u的主高度。在所示的示例中,功能区域156具有1500mm的高度h2,因此可以包括多达五个马达启动模块200。
[0236]
此外,沿y轴测量的马达启动模块的宽度等于安装该模块的功能区域的宽度l2。
[0237]
每个马达启动模块200配置为容纳任何技术上允许的抽屉组合,这取决于这些抽屉的高度。例如,马达启动模块可以容纳六个高度为1u的抽屉,或者三个高度为2u的抽屉,或者一个高度为6u的抽屉。
[0238]
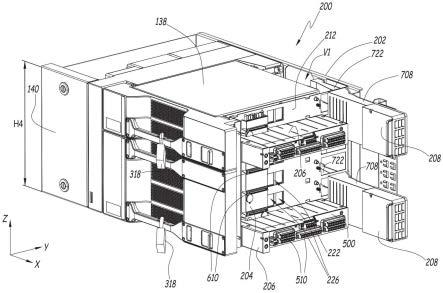
如图8和9所示,每个马达启动模块200包括以下元件:
[0239]-支撑结构202;
[0240]-保护单元140;
[0241]-对应于计算机总线142的一部分的计算机总线段204;
[0242]-至少一个抽屉138,实际上在一至六个抽屉138之间;
[0243]-至少一个输入输出模块206,实际上是相同数量的输入输出模块206和抽屉138,即在一至六个输入输出模块之间;和
[0244]-至少一个外部连接模块208,实际上具有相同数量的连接模块208和抽屉138,即一至六个外部连接模块。每个外部连接模块208配置用于电气负载104与其连接,并向该电气负载供电。实际上,在马达启动模块200的情况下,每个负载104是电马达。
[0245]
在图8所示的例子中,所示的马达启动模块200容纳一个高度为2u的抽屉和一个高度为4u的抽屉。
[0246]
在图9所示的例子中,所示的马达启动模块200容纳两个高度为1u的抽屉和两个高度为2u的抽屉。
[0247]
马达启动模块中抽屉138的三个主要位置被定义为:
[0248]-抽屉的操作位置,在该位置,抽屉完全插入马达启动模块200中。该位置对应于抽屉138的正常操作位置,即,一方面,抽屉138向外部连接模块208和与其连接的电气负载104供电,另一方面,抽屉138连接到通信模块134和保护单元140。图8中的两个抽屉和图9中的三个下部抽屉都处于操作位置。
[0249]-抽屉的测试位置,在该位置,抽屉部分插入马达启动模块200中。该位置对应于抽屉138正在操作的中间位置,即,它包含的元件被供电,并且它通信,但是抽屉不向任何电气负载104供电。高度1u的上部抽屉如图9所示处于测试位置。
[0250]-抽屉的断开位置,在该位置,抽屉部分或完全脱离马达启动模块200,并且在该位置,抽屉未被供电,并且不向任何电气负载104供电。
[0251]
抽屉138配置成能够在这三个位置之间移动。
[0252]
如图10所示,每个马达启动模块200的支撑结构202包括背部支撑件210和侧向支撑件212。
[0253]
背部支撑件210和侧向支撑件212一方面使得可以将马达启动模块200附接到马达启动柱110,另一方面使得可以将计算机总线段204、保护单元140、每个抽屉138、每个输入输出模块206和每个外部连接模块208附接到马达启动模块200。
[0254]
实际上,每个马达启动模块200通过其支撑件202附接到该模块所属的马达启动柱110的基本框架164。
[0255]
为此,当柜具有400mm的宽度l2时,如在图4的实施例中,背部支撑件210连接到位于柜背面的基本框架164的杆172上,或者当柜具有600mm的宽度l1时,如在图1至3和5的实施例中,背部支撑件210连接到基本框架164的加强件174。侧向支撑件212附接到位于柜正面的基本框架164的杆172。
[0256]
支撑件210和212与基本框架164的附接优选使用螺钉(图中未示出)进行。
[0257]
支撑件210和212优选使用螺钉(图中未示出)附接在一起。
[0258]
在柜100上的马达启动模块200的组装配置中,背部支撑件210主要平行于由x轴和z轴形成的平面延伸。它总体上是矩形的,并且包括通风孔214,在该示例中示出了六个通风孔。
[0259]
背部支撑件210包括一组附接孔216,这一组附接孔使得可以将背部支撑件210附接到基本框架164和马达启动模块200的元件,例如保护单元140或外部连接模块208。
[0260]
在柜100上的马达启动模块200的组装配置中,侧向支撑件212主要平行于由y轴和z轴形成的平面延伸。它总体上是矩形的。
[0261]
侧向支撑件212配置为一方面在第一端附接到背部支撑件210,另一方面在第二端附接到柜100的基本框架164。侧向支撑件212包括允许这种安装的一组附接孔218,这优选使用螺钉(未示出)进行。
[0262]
侧向支撑件212包括开口220,开口220靠近背部支撑件210,即靠近马达启动模块的背部定位。如图8所示,这些开口配置成允许外部连接模块208通过。实际上,侧向支撑件212包括六个开口220。
[0263]
此外,侧向支撑件212包括窗口222,其作用将在下面解释。实际上,支撑件包括六个窗口222。
[0264]
在所示的例子中,背部支撑件210和侧向支撑件212由折叠和穿孔的金属板形成。
[0265]
此外,支撑结构202包括导轨224,实际上是沿y轴延伸的六个导轨224。优选地,导轨224通过螺钉(未示出)附接到侧向支撑件212。
[0266]
每个导轨224包括沿y轴并置的两个窗口226。如图8和10所示,当导轨附接到侧向支撑件212时,其两个窗口226面向侧向支撑件212的窗口222。
[0267]
在图10中,两个导轨224,即上导轨和下导轨,以分解图示出,即,这两个导轨被示出为未安装在侧向支撑件212上。其它中间导轨显示在侧向支撑件212上的适当位置。
[0268]
每个导轨224具有“u”形,底部228平行于由y轴和z轴形成的平面,窗口226在该平面中形成,并且两个边缘230垂直于底部228延伸。因此,两个边缘230彼此相对。
[0269]
此外,每个导轨224的边缘230包括舌状物232,其在轨道的相对边缘的方向上延伸。导轨的舌状物232在其边缘230中制成,位于该导轨的窗口226的最靠近背部支撑件210的水平处,更准确地说,位于该窗口的最靠近背部支撑件210的一端。
[0270]
保护单元140在图11和12中以透视图示出。
[0271]
该保护单元包含一个或多个保护构件(未示出),例如断路器,其保护马达启动模块200的一个或多个抽屉138。
[0272]
保护单元140包括正面234、背面236、内面238和外面240。
[0273]
实际上,在安装配置中,保护单元的正面234包含在与柜100的正面f1相同的平面中。
[0274]
实际上,正面和背面234和236平行于由x轴和z轴形成的平面,而内面238和外面240平行于由y轴和z轴形成的平面。
[0275]
保护单元140的背面236例如使用螺钉(未示出)附接到马达启动模块200的结构202的背部支撑件210,该螺钉穿过背部支撑件中的附接孔216。
[0276]
当保护单元140附接到结构202时,保护单元的内面238和结构202的侧向支撑件212面对,即它们被布置成彼此面对。体积v1被定义为位于保护单元的内面238、背部支撑件210和侧向支撑件212之间的体积。
[0277]
如图12所示,保护单元140与一组竖直母线122的电连接使用布置在保护单元的外面240上的电连接器244实现。每个连接器244连接到一组竖直母线122的竖直母线124。实际上,保护单元140包括四个电连接器244,这使得可以连接例如包括三相和中性线的电源。此外,可能不连接一些电连接器244,例如,如果电气柜100的电源包括没有中性线的三相,或
者一相和中性线。
[0278]
保护单元140包括多个电输出组246。这些电输出组从保护单元的背面236朝其正面234的方向延伸。换句话说,电输出组246布置在体积v1中。
[0279]
实际上,保护单元140包括六个电输出组246。
[0280]
保护单元140因此可以保护多达六个抽屉138。
[0281]
因此,保护单元140可以集中保护马达启动模块200的抽屉138。这种集中是有利的,因为它使得可以降低马达启动模块的成本,每个抽屉138不需要专用的保护单元。
[0282]
此外,保护单元140不集成到抽屉138中是有利的。具体而言,在抽屉出现故障的情况下,只需更换该抽屉,而不必更换保护单元140,这成本较低。
[0283]
每个电输出组246包括四个电输出248,每个电输出连接到四个电连接器244中的一个。
[0284]
保护单元140的保护构件因此布置在电连接器244和电输出248之间。
[0285]
因此,对于每相和中性线,该保护构件作为输入连接到连接器244,并且作为输出连接到六个电输出248,即连接到每个电输出组的四个电输出之一。
[0286]
一个电输出组246包含在高度等于1u的体积中。
[0287]
保护单元140包括导轨250,优选六个导轨250,其与支撑结构202的导轨224相同。特别地,导轨250包括窗口252和舌状物254。
[0288]
导轨250布置在保护单元的内面238上。
[0289]
在图11中,上和下导轨250以分解图示出,即这些导轨从保护单元140上卸下。其他中间导轨250被显示在保护单元140上的适当位置。
[0290]
导轨250面向支撑结构202的导轨224,即每个导轨250平行于导轨224延伸,并且与导轨224在同一水平面上。因此,导轨250和导轨224一起形成一对导轨。
[0291]
如下所述,由导轨250和导轨224形成的一对导轨使得抽屉138能够在其操作位置、其测试位置和其断开位置之间移动。
[0292]
此外,保护单元140的内面238包括窗口256,实际上是六个窗口256,它们面向导轨250的窗口252。
[0293]
图13和14示出了高度为4u的抽屉138。
[0294]
这个高度为4u的抽屉138包括前部300。
[0295]
如图13所示,抽屉的前部300主要平行于由轴线x和z形成的平面延伸。
[0296]
所有抽屉138包括前部300,该前部根据抽屉的高度而不同。因此,前部的高度与该前部的抽屉的高度相匹配。因此,前部300可以具有1u、2u、3u、4u、5u或6u的高度。
[0297]
在本说明书的其余部分,参考图13和14的高度为4u的抽屉138描述的任何元件也存在于不同高度的抽屉138中,除非另外明确提到。
[0298]
前部300包括显示器302,其显示关于抽屉138的操作的信息。该信息例如是由抽屉138控制的电气负载104的基准、输送到该电气负载的电功率或该电气负载的状态。
[0299]
作为变型,显示器302还包括发光二极管或“led”条,其包括能够以颜色形式发出视觉指示的一个或多个led。
[0300]
前部300包括主手柄304。
[0301]
手柄304包括基部306和把手延伸部308。
[0302]
在实践中,基部306和把手延伸部308由形成为一体的部件形成,通过紧固装置309例如螺钉连接到前部。
[0303]
基部306包括按钮310。按钮310使得可以发送命令以打开设置在抽屉138一侧的电磁锁311,如图13和14所示,其中电磁锁311位于保护单元140的导轨250的一侧。
[0304]
作为变型,如图15和16所示,电磁锁311设置在抽屉138的另一侧,其中电磁锁311位于支撑结构202的导轨224的一侧。作为变型,两个电磁锁311布置在抽屉138上,一侧一个。
[0305]
作为本发明的变型(未示出),按钮310布置在抽屉138的前部300上的另一位置。
[0306]
该电磁锁311可在用于锁定抽屉138的位置和用于解锁抽屉138的位置之间移动。
[0307]
在用于锁定抽屉138的位置,电磁锁311使得可以将抽屉138保持在操作位置或测试位置。换句话说,电磁锁防止抽屉从其测试位置到其操作位置插入马达启动模块200,并防止抽屉从其操作位置或从其测试位置退出马达启动模块。
[0308]
在用于解锁抽屉138的位置,电磁锁允许抽屉从其测试位置到其操作位置自由地插入到马达启动模块中,或者从其操作位置或从其测试位置从马达启动模块中取出。
[0309]
实际上,在用于锁定抽屉138的位置,电磁锁311延伸出抽屉,并机械地阻止其插入马达启动模块或从马达启动模块移除,如下文详述。
[0310]
默认情况下,电磁锁311处于用于锁定抽屉138的位置,并且当接收到打开命令时,锁移动到用于解锁抽屉的位置。在没有打开命令的情况下,默认情况下,锁移动到用于锁定抽屉的位置。
[0311]
在该示例中,按钮310必须被压入基部306中以传送打开命令,并且弹簧(未示出)保持按钮不被压下。
[0312]
换句话说,为了将抽屉138从其测试位置插入马达启动模块至其操作位置,或者为了将抽屉138从其操作位置从马达启动模块移除,需要致动按钮310。因此,当按钮310被致动时,它可以发送控制电磁锁311解锁的打开命令,从而允许抽屉从其操作位置或从其测试位置移动。
[0313]
在实践中,由按钮310控制的电磁锁311通过与导轨224或导轨250干涉来防止抽屉138从其测试位置插入到其操作位置,或者防止抽屉138从其操作位置移除。
[0314]
在图36和37中,抽屉138被显示为分别在测试位置和操作位置被电磁锁311锁定。在该示例中,电磁锁311被示出在支撑结构202的导轨224的一侧。
[0315]
以下对电磁锁311的操作的描述同样适用于布置在导轨250的一侧上并与该导轨250干涉以防止抽屉138移动的电磁锁。
[0316]
从这些图36和37中可以看出,电磁锁311包括摇杆3111和布置在摇杆3111的第一端3115的插销3113。摇杆可绕第二端3117旋转移动。因此,当电磁锁311接收到打开命令时,摇杆3111被可旋转地驱动,从而移动插销3113。
[0317]
在用于锁定电磁锁311的位置,当抽屉138处于测试位置时,插销3113布置在导轨224中的槽2241中,或者当抽屉处于操作位置时,插销3113布置在同一导轨224中的另一槽2243中。
[0318]
因此,抽屉138的移动通过插销3113与支撑结构202的导轨224的槽2241的边缘或槽2243的边缘的接触而被阻止。
[0319]
摇杆3111的旋转由电磁致动器(未示出)驱动。当电磁锁311接收到打开命令时,该电磁致动器被激活。实际上,按钮310的致动产生打开命令,该命令是控制电磁锁311的致动器的激活的电信号。
[0320]
作为本发明的变型(未示出),电磁锁311不包括可旋转移动的摇杆,并且插销3113由电磁致动器平移驱动,例如通过滑块。
[0321]
基部306包括滑块312,可通过基部306中的窗口314接近。
[0322]
滑块312可在用于锁定按钮310的位置和用于解锁按钮310的位置之间致动。
[0323]
在用于锁定按钮310的位置,滑块312机械地防止按钮310被致动。换句话说,在该位置,不可能向电磁锁311发送打开命令,因此不可能将抽屉138在马达启动模块200中从其操作位置或从其测试位置移动。
[0324]
因此,滑块312的防止按钮310被滑块致动的位置对应于用于锁定抽屉138的位置。
[0325]
在图13中,滑块312被示出处于用于锁定按钮310的位置。实际上,滑块312可以相对于基部306沿着x轴平移,并且当滑块位于基部中的窗口314的右侧时,获得用于锁定滑块的位置。
[0326]
手柄的把手延伸部308配置成容易被手抓握,从而便于抽屉138在马达启动模块200内平行于y轴移动。
[0327]
此外,把手延伸部308包括端部开口的孔316。孔316配置成允许锁定装置318被放置在主手柄304中的适当位置。
[0328]
锁定装置318在图8和9中示出,并且在该示例中是挂锁。
[0329]
在实践中,端部开口的孔316配置成允许多个锁定装置318放置在其中的适当位置,例如三个锁定装置的柄。
[0330]
滑块312牢固地附接到图40中可见的柄810上,该柄在抽屉138的主手柄304内延伸。
[0331]
柄810包括第一自由端812和第二自由端814。
[0332]
柄810的第一端812牢固地连接到支撑板816,支撑板816由滑块312驱动运动。因此,滑块312通过支撑板816将平移运动传递给柄810。
[0333]
在实践中,支撑板816布置在手柄304的基部306中,并且可在基部306中沿着平行于抽屉138的x轴的轴线平移。
[0334]
柄810的自由端814构造成在用于锁定按钮310的位置中不延伸到端部开口的孔316中,并且在用于解锁按钮310的位置中延伸到端部开口的孔316中。
[0335]
因此,当锁定装置318在端部开口的孔316中就位时,滑块312不能被致动到用于解锁按钮310的位置,因为通过锁定装置318防止柄810的端部814延伸到端部开口的孔316中,在该示例中是通过挂锁的钩环。
[0336]
此外,柄810包括切口818。当滑块312处于用于解锁按钮310的位置时,切口818面向按钮310,并且不会阻止按钮的激活。相反,当滑块312处于用于锁定按钮310的位置时,切口818相对于按钮310沿x轴偏移,然后柄810的主体防止按钮被致动。
[0337]
换句话说,当滑块312处于用于锁定抽屉138的位置时,并且可能当锁定装置318处于端部开口的孔316中的适当位置时,按钮310不能被致动。
[0338]
总之,当滑块312处于用于锁定按钮310的位置时,可以将锁定装置318放置在手柄
304的孔316中,这使得可以防止滑块312平移到用于解锁按钮310的位置。这使得可以阻止按钮310的致动,并因此阻止经由电磁锁311解锁抽屉138的命令的发送。
[0339]
固定到滑块312并由其驱动的支撑板816还连接到机械锁820上,如图36至40所示。在图36和37中,为了使机械锁820的机构的一部分可见,导轨224被部分隐藏。
[0340]
在这些图中所示的例子中,机械锁820被示出在导轨224的一侧。机械锁820的操作的以下描述同样适用于布置在导轨250的一侧上并且与该导轨250干涉以防止抽屉138移动的机械锁。
[0341]
机械锁820与电磁锁311互补,这些锁一起形成抽屉138的锁定系统。
[0342]
优选地,机械锁820由金属材料制成,例如钢。
[0343]
机械锁820包括附接到抽屉138的结构822。该结构822主要平行于y轴延伸,即平行于马达启动模块200中的抽屉138的运动轴。
[0344]
此外,当抽屉138安装在马达启动模块200中时,结构822容纳在导轨224中。
[0345]
结构822包括凸起形状的舌状物824,该舌状物824与导轨224接触,因此当抽屉安装在马达启动模块中时,可以保持结构822和导轨224之间的电连续性。特别地,这种电连续性使得抽屉138可以与马达启动模块200具有共同的接地。
[0346]
机械锁820包括柄826,该柄主要平行于y轴延伸,并且可相对于结构822沿着该轴平移。
[0347]
柄826包括第一端828、主体829和第二端830。
[0348]
第二端830相对于主体829较薄,即沿着平行于抽屉138的z轴的轴测量的第二端830的尺寸小于主体829的尺寸。换句话说,第二端830比主体829窄。
[0349]
第一端828通过枢轴连杆834连接到致动杆832,其轴线z834平行于抽屉138的z轴。因此,致动杆832可相对于柄826旋转移动。
[0350]
此外,致动杆832还通过枢轴连杆836连接到结构822,其轴线z836平行于抽屉138的z轴线。因此,致动杆832可相对于结构822旋转移动。实际上,轴线z836代表致动杆832相对于抽屉138的旋转轴线,因为结构822相对于抽屉138是固定的。
[0351]
此外,在致动杆832中制造有引导导轨838。引导导轨838具有弯曲形状,即它包括两个相对于彼此倾斜的直线部分,分别由840和842表示。
[0352]
附接到支撑板816的销844布置在引导导轨838中。更准确地说,销844布置在腿845的端部,腿845与支撑板816形成一体,并相对于该支撑件成直角折叠。因此,销844是可移动的,并且其移动由滑块312驱动。
[0353]
如图38所示,当滑块312处于用于锁定按钮310的位置时,销844布置在引导导轨838的部分840中。
[0354]
如图39所示,当滑块312处于用于解锁按钮310的位置时,销844布置在引导导轨838的部分842中。
[0355]
由于销844沿着平行于抽屉x轴的轴的平移,滑块312从其锁定位置到其解锁位置的运动驱动致动杆832绕轴z836旋转。
[0356]
具体地,销844仅平移,因为它通过腿845附接到支撑板816。当销844位于引导导轨838的第一部分840中时,这种平移在不移动致动杆832的情况下发生。接下来,一旦销844接合在引导导轨838的第二部分842中,通过在引导导轨的侧壁上施加力,销844就迫使致动杆
832围绕枢轴836旋转。
[0357]
在销844的作用下,致动杆832的旋转驱动枢轴834运动,然后枢轴834沿着平行于抽屉138的y轴的轴更靠近支撑板816。
[0358]
枢轴834的这种运动然后驱动柄826也沿着平行于抽屉138的y轴的轴并且在支撑板816的方向上运动。
[0359]
因此,致动杆832使得可以将滑块312沿着平行于抽屉138的x轴的轴线的平移运动转换成柄826沿着平行于抽屉的y轴的轴线的平移运动,即在垂直于滑块312的平移方向的方向上的平移运动。
[0360]
优选地,柄826和致动杆832之间的连接包括沿着平行于抽屉138的x轴(图中不可见)的轴线的一组操作,这有助于将致动杆的旋转转换成柄的平移。
[0361]
柄826的第二端830与属于机械锁820的两个闩锁850配合。每个闩锁850包括围绕枢轴854可枢转地安装的主体852和钩856,枢轴854的旋转轴x854平行于抽屉138的x轴。
[0362]
每个闩锁850可在图36和38所示的用于锁定抽屉138的位置和图37和39所示的用于解锁抽屉138的位置之间移动。
[0363]
当闩锁850处于用于锁定抽屉138的位置时,它们的钩856延伸到导轨224中的凹口2245中。该位置如图36所示。
[0364]
在该位置,抽屉138处于测试位置,并且不能移动到其操作位置或其断开位置,因为钩856抵靠导轨224中的凹口2245的壁。
[0365]
如图37所示,当闩锁850处于用于解锁抽屉138的位置时,钩856不延伸到凹口2245中,并且不会阻止抽屉138在马达启动模块中的运动。
[0366]
如图38和39所示,结构822还包括两个引导凹口857。当闩锁850处于锁定抽屉138的位置时以及当闩锁处于解锁抽屉的位置时,每个凹口857被配置成引导钩856,即钩856延伸穿过凹口857。
[0367]
由于引导凹口857,钩856的运动被引导,从而当闩锁850移动到用于锁定抽屉138的位置时,便于它们插入导轨224中的凹口2245。
[0368]
默认情况下,闩锁850处于用于解锁抽屉138的位置。
[0369]
具体地,机械锁820还包括弹性构件858,该弹性构件858将闩锁850保持在用于解锁抽屉138的位置。
[0370]
在所示的示例中,该弹性构件858是可弹性变形的舌状物,例如由弹簧钢制成。
[0371]
这种可弹性变形的舌状物总体上呈u形,其臂从底部开始随着距离的增加而会聚。它围绕枢轴854延伸,并且其两端分别由闩锁850的主体852的端部860保持。
[0372]
作为本发明的变型(未示出),弹性构件858是拉伸弹簧,例如螺旋弹簧,其沿着平行于抽屉138的z轴的轴在两个闩锁的主体852的两端860之间延伸。
[0373]
每个闩锁850还包括朝向另一闩锁850的凸轮862。因此,两个凸轮862定位成彼此面对。
[0374]
当滑块312处于用于解锁按钮310的位置时,闩锁850处于用于解锁抽屉138的位置。
[0375]
具体地,当滑块312处于用于解锁按钮310的位置时,柄826的第二端830位于闩锁850的凸轮862之间。由于该第二端830较薄,凸轮862彼此靠近,钩856离导轨224足够远,从
而不会延伸到导轨中的凹口2245中。
[0376]
相反,当滑块312处于用于锁定按钮310的位置时,闩锁850处于用于锁定抽屉138的位置。
[0377]
具体地,当滑块312处于用于锁定按钮310的位置时,柄826移动,使得柄的主体829位于闩锁850的凸轮862之间,如图36所示。因此,闩锁850彼此移开,钩856延伸到导轨224中的凹口2245中。
[0378]
换句话说,当滑块312从其用于解锁的位置移动到其用于锁定按钮310的位置时,机械锁820的柄826移动以推动凸轮862,从而将钩856移动分开进入导轨224中的凹口2245,直到闩锁850到达其锁定抽屉138的位置。因此,滑块312的运动使得可以移动钩856。
[0379]
导轨224中的凹口2245被制作在特定位置,使得钩856仅在抽屉138处于测试位置时可以在其中延伸。机械锁820因此使得可以将抽屉138锁定在测试位置。
[0380]
因此,机械锁820可在两个位置之间移动:用于锁定抽屉138的位置,在该位置中抽屉处于测试位置,以及用于解锁抽屉138的位置,在该位置中机械锁820不阻止抽屉138的移动。
[0381]
此外,当滑块312处于用于锁定按钮310的位置时,机械锁820处于用于锁定抽屉138的位置,当滑块312处于用于解锁按钮310的位置时,机械锁820处于用于解锁抽屉138的位置。
[0382]
因此,当滑块312处于用于锁定按钮310的位置时,借助机械锁820,可以机械地阻止马达启动模块200中的抽屉138的运动。
[0383]
此外,在滑块312的这个位置,锁定装置可以被放置在手柄中的孔316中的适当位置,其然后防止滑块进入用于解锁按钮310的位置的通道,并且因此防止机械锁820进入用于解锁抽屉138的位置的通道。
[0384]
总之,滑块312使得可以致动机械锁820。
[0385]
因此,抽屉138的锁定系统包括两个不同的锁定机构,即电磁锁311和机械锁820。
[0386]
应当理解,滑块312与这两个锁定机构相互作用,因为根据其位置,滑块312允许或阻止按钮310的激活,按钮310控制电磁锁311,并在其用于锁定或用于解锁抽屉138的位置之间移动机械锁820。
[0387]
总之,电磁锁311使得可以将抽屉138锁定在操作位置或测试位置,并且机械锁820使得可以将抽屉138锁定在测试位置。
[0388]
此外,电磁锁311可以仅在机械锁820解锁时解锁。
[0389]
抽屉138在测试位置的位置的锁定具有冗余,这对于安全使用抽屉138和与其连接的电气负载104特别有利。
[0390]
具体而言,在对连接到抽屉138的电气负载104进行维护操作期间,期望向抽屉138供应电力,但是不向电气负载104供应电力,这对应于抽屉的测试位置。在抽屉的这个位置,可以无风险地对连接到抽屉的电气负载104进行操作,因为电气负载104没有被供电。
[0391]
为了确保在电气负载104上操作的维护操作员的安全,有必要确保抽屉138不能从其测试位置移动到其操作位置。为此,维护操作员将锁定装置318(例如挂锁)放置在抽屉138上的适当位置,这防止了抽屉138的移动。该操作被称为电气负载104的“电气封锁”,因为只要安装了锁定装置318,就不可能重新建立对电气负载104的电力供应。
[0392]
锁定装置318因此防止抽屉138解锁。
[0393]
因为通孔316被配置为能够容纳多个锁定装置318,所以多个维护操作员可以通过各自安装锁定装置318来防止抽屉138解锁。
[0394]
具有锁定冗余则更安全,因为在两个锁中的一个失效的情况下,抽屉138移动到操作位置仍然是不可能的。
[0395]
此外,电磁锁311和机械锁820都独立于抽屉138中包含的元件操作。因此,上述锁定系统可用于许多类型的监测和控制抽屉,而不管这些抽屉包括什么功能。
[0396]
作为变型,抽屉138还包括手动操作的机构,该机构使得在没有电压的情况下解锁电磁锁311成为可能,从而允许抽屉从其操作位置移动到其测试位置,或者从其测试位置移动到其断开位置。
[0397]
作为变型,抽屉138不包括机械锁820,并且用于抽屉的锁定系统仅由电磁锁311形成。
[0398]
作为变型,按钮310被另一种控制装置替代,例如触摸屏或手柄。
[0399]
作为变型,电磁锁311由除按钮310之外的装置控制,特别是由远程装置控制。在这种变型中,打开电磁锁311的命令例如由远程计算机发送,该远程计算机可以是计算机130,或者例如由通信模块134发送。
[0400]
抽屉138的前部300还包括第二手柄320。
[0401]
第二手柄320包括基部322和把手延伸部324。
[0402]
第二手柄的抓握延伸部324与主手柄304的把手延伸部308相同。
[0403]
第二手柄320的基部322不同于主手柄的基部306,因为基部322不包括按钮或滑块。
[0404]
实际上,只有高度为4u、5u和6u的抽屉138包括第二手柄320。高度为1u、2u和3u的抽屉仅包括主手柄304。
[0405]
主手柄304的高度等于1u,以便能够安装在高度为1u的抽屉上。
[0406]
前部300包括通风格栅326。通风格栅实际上是形成在前部区域中的穿孔,其允许空气在抽屉138的外部和抽屉的内部之间流动。
[0407]
每个通风格栅326的高度等于1u。
[0408]
实际上,高度为n
×
u的抽屉的前部包括n个通风格栅,n是1到6之间的整数。例如,图13和14的高度为4u的抽屉的前部326包括四个通风格栅326,而图8中可见的高度为2u的抽屉的前部包括两个通风格栅326。
[0409]
抽屉138包括高度等于1u的基部328和盖330。
[0410]
基部328是抽屉的主要结构。抽屉的前部附接到基部328,并且抽屉通过基部328安装并固定在马达启动模块200中。
[0411]
实际上,电磁锁311布置在抽屉的基部328中。
[0412]
基部328是水平的,并且抽屉中包含的元件附接于其上,这些元件将在下面详细描述。
[0413]
在图8、9、13和14所示的例子中,基部328位于抽屉138的底部。
[0414]
盖330是保护结构,其使得可以关闭抽屉138和保护容纳在抽屉中的元件。实际上,盖330的形状取决于抽屉138的高度。因此,每个抽屉高度都有相应的盖高度。
[0415]
当抽屉138的高度等于1u时,盖330由水平平板332形成。这样的例子在图9中可见。在这样的例子中,认为盖330的高度是0
×
u。
[0416]
如图13和14所示,当抽屉138的高度大于1u时,盖330包括水平平板332、从平板的两个相对边缘向基部328延伸并平行于由y轴和z轴形成的平面的两个侧壁334,以及从平板的与抽屉前部300相对的边缘向基部328延伸并平行于由x轴和z轴形成的平面的后壁336。在这种构造中,盖330的高度比抽屉138的高度短1u。
[0417]
因此,盖330的高度在0u和5u之间。
[0418]
实际上,在对应于高度为4u的抽屉的图13和14的例子中,盖330的高度等于3u。因此,当它位于基部328上时,盖330从基部延伸到抽屉138的顶部,即盖330的平板332处于前部300的上边缘的水平。
[0419]
在抽屉高度等于2u或3u的情况下,盖330的后壁336包括一个通风孔338。
[0420]
在抽屉的高度等于4u、5u或6u的情况下,盖330的后壁336包括两个通风孔338。
[0421]
作为变型,高度为6u的抽屉的盖的后壁336包括三个通风孔338。
[0422]
在图15和16中,示出了高度等于1u的抽屉138,但没有与图9所示相同的盖330。
[0423]
在图15中,可以看到抽屉138的前部300,其滑块312处于用于解锁按钮310的位置,即滑块位于基部306中的窗口314的左侧,并且按钮310可以被致动以从马达启动模块200解锁抽屉138。
[0424]
基部328包括支撑板340。支撑板340呈“u”形,即它包括主要部分342和两个竖直壁344,主要部分342是水平的,并且实际上是抽屉138的底部,竖直壁344平行于由y轴和z轴形成的平面延伸。
[0425]
此外,基部328包括两个侧向结构346。侧向结构346通过紧固装置例如螺钉347附接在支撑板340的竖直壁344的外部。在实践中,侧向结构346从抽屉138的前部300沿着y轴延伸到抽屉的后部,即延伸到抽屉的与其前部相对的后部348,该抽屉的后部348也属于抽屉138的基部328。
[0426]
因此,侧向结构346属于抽屉138的基部328。
[0427]
实际上,机械锁820的结构822被固定到侧向结构346。
[0428]
每个侧向结构346包括辊子350,优选两个辊子350。
[0429]
辊子350每个都具有平行于x轴的轴x350,并且被配置成在马达启动模块的结构202的导轨224中和保护单元140的导轨250中滚动。因此,辊子350的直径小于导轨224和250的两个边缘之间的间距。
[0430]
实际上,每个抽屉138安装在马达启动模块200的体积v1中。为此,第一侧向结构346被插入导轨224和250的第一导轨中,第二侧向结构346被插入同一对导轨的导轨224和250的第二导轨中,然后辊子350在导轨上的滚动使得可以将抽屉插入马达启动模块中以及将其从马达启动模块移除。
[0431]
因此,借助于侧向结构346,抽屉138可在马达启动模块中在抽屉的三个主要位置之间移动。
[0432]
每个侧向结构346还包括可移动的侧向触点352,其使得可以将抽屉138连接到属于输入输出模块206或保护单元140的通信接口353,其操作将在下面解释。
[0433]
抽屉138的后部348在两个侧向结构346之间延伸。
[0434]
在1u高度的抽屉的情况下,盖330从前部300延伸到后部348,并且在两个侧向结构346之间。
[0435]
在抽屉高度大于或等于2u的情况下,盖330的侧壁334向上延伸到竖直壁344,盖的后壁336向上延伸到后部348。
[0436]
后部348包括一组上游连接器354、一组下游连接器356和通风孔358。
[0437]
因此,上游连接器354和下游连接器356安装在抽屉138的基部328上。
[0438]
从图16中可以更清楚地看到,通风孔358沿着抽屉138的纵向x轴位于上游连接器组354和下游连接器组356之间。有利地,通风孔358沿着x轴相对于基部328居中。此外,上游连接器组354和下游连接器组356对称地布置在通风孔358的两侧。
[0439]
当抽屉安装在马达启动模块200中时,通风孔358面向背部支撑件210的通风孔214定位。
[0440]
实际上,后部348包括四个上游连接器354和四个下游连接器356。
[0441]
当抽屉138处于操作位置时,上游连接器354装配到保护单元140的一组电输出246的四个电输出248上。因此,抽屉138经由保护单元140从供电线被供应电力。换句话说,保护单元140是抽屉138的电源。
[0442]
当抽屉138处于操作位置时,下游连接器356装配到外部连接模块208上。因此,抽屉138向外部连接模块208供应电力,并且当电气负载104连接到外部连接模块208时,使得可以向电气负载104供应电力。
[0443]
当抽屉138处于测试位置或断开位置时,上游连接器354和下游连接器356分别从保护单元140和外部连接模块208的电输出248拔出。
[0444]
抽屉138包括功能元件362,功能元件362没有详细示出,但是其位置在图17中用虚线标出。以已知的方式,这些功能元件362使得可以控制电气负载104,实际上是电马达,并且允许抽屉138的操作。
[0445]
这些功能元件具体包括:
[0446]-至少一个接触器;
[0447]-热保护继电器,例如双金属机电继电器或电子继电器,其具有保护由抽屉138供电的电马达免受潜在过载的作用,该过载尤其可能在启动马达时发生;
[0448]-用于抽屉138操作的传感器,例如用于来自上游连接器354的电源电压的传感器;和
[0449]-配置成从布置在电气负载104上或附近的用于电气负载104的操作的传感器(例如温度探头或速度传感器)收集信号的电子部件。
[0450]
实际上,接触器通过连接母线360直接连接到上游连接器354,并通过下游连接母线361连接到下游连接器356。实际上,每个连接器354或356提供一个连接母线360或361。在图15和16中,为了简单起见,仅示出了三个连接母线,即电流相的母线。
[0451]
因此,接触器可以以已知的方式选择性地中断或允许上游连接器354和下游连接器356之间的电流流动。借助于接触器,可以向电气负载104供应电力,这使得例如可以在允许电流流动时启动然后运行电马达,并且在电流中断时停止这样的马达的操作。
[0452]
此外,抽屉138可以包含多个接触器,这使得例如可以控制输送到电气负载104的电压,以便控制例如马达的转速;或者控制马达的旋转方向。
[0453]
抽屉138还包括控制电路板364。控制电路板附接到支撑板340。
[0454]
控制电路板364连接到马达启动柱110的通信模块134。这使得可以根据来自通信模块的命令来控制抽屉138的功能元件362,例如接触器、热保护继电器、显示器302。它还使得可以在分析来自传感器的用于抽屉操作的信息和来自电子部件的信息并将其传输到通信模块134之前,将这些信息组合在一起,所述电子部件被配置为收集来自传感器的用于电气负载操作的信号。
[0455]
根据对来自用于抽屉和电气负载的操作的传感器的信息的这种分析,控制电路板364可以调整其对功能元件362的控制,例如当操作传感器返回电气负载中的故障时,通过向接触器发出中断向电气负载供电的命令。
[0456]
因此,借助于功能元件362和电路板364,每个抽屉138向电气负载104供电,控制该电气负载并监测该电气负载。因此,每个抽屉138同时具有向电气负载104供电、控制和监测电气负载104的作用。
[0457]
抽屉的控制电路板364、功能元件362和电磁锁311被供给第一辅助电压。
[0458]
电磁锁311实际上由控制电路板364控制,按钮310与控制电路板通信。
[0459]
当按钮310被致动时,它向控制电路板364发送控制信号,请求激活电磁锁311,以便移动到用于解锁抽屉138的位置。
[0460]
在这种情况下,在接收到来自按钮310的信号之后并且在将电磁锁移动到用于解锁抽屉的位置之前,控制电路板364执行验证操作。
[0461]
这些验证操作包括,例如,分析来自用于抽屉操作的传感器和来自用于电气负载104操作的传感器的信息,以便仅当抽屉(例如功能元件362)和/或电气负载的操作状态令人满意时,将电磁锁311移动到用于解锁抽屉的位置。
[0462]
控制电路板被配置成使得如果在这些验证操作期间检测到抽屉138中的故障,例如功能元件362之一中的故障,或者电气负载104中的故障,例如用于电气负载操作的传感器之一中的故障,则锁311不移动到用于解锁抽屉的位置,并且因此优选地,在显示器302上显示通知该故障的消息。
[0463]
因此,借助于电磁锁311,其打开由按钮310控制并由控制电路板364验证,抽屉138可以解锁,即仅在抽屉138和/或电气负载104的正确操作状态验证之后从其测试位置或其操作位置移动。
[0464]
在解锁抽屉138之前的这种验证是特别有利的,因为它使得可以通过在连接之前确保抽屉和电气负载的正确操作来安全地使用电气柜100和电气负载104。
[0465]
抽屉138的高度选择——即从1u到6u——取决于必须输送给电气负载104的电力。具体地,电气负载104消耗的功率越高,接触器和其他功能元件的尺寸越大。
[0466]
因此,控制例如高达11kw的低功率马达的接触器将相对较小,并且可以安装在1u高度的抽屉中,而控制例如75kw的高功率马达的接触器将较大,并且必须安装在6u高度的抽屉中。控制中等功率(例如30kw)马达的接触器将例如安装在3u高的抽屉中。
[0467]
这里描述的抽屉138的设计是有利的,因为基部328对于抽屉138的六个高度是共用的,基部328构成抽屉的主要结构,允许其安装在马达启动模块中,并且承载抽屉138的所有电连接器-上游和前连接器、侧向触点-和功能元件362。
[0468]
由于前部300和盖330的高度适合于功能元件362的尺寸,抽屉138是模块化的。
[0469]
因此,很容易使抽屉138的高度适应接触器和其他功能元件的尺寸,因为不同高度的抽屉138之间只有前部300和盖330不同。
[0470]
抽屉138的功能元件362在其操作期间变热,特别是接触器和热保护继电器。如此产生的热量加热抽屉138中包含的空气,然后必须补充空气,以保持与抽屉的功能元件的正常操作条件相适应的内部温度。
[0471]
图17示出了流经抽屉138的气流fl1。
[0472]
在该图中,抽屉138的功能元件362的位置用虚线示出。可以观察到,气流fl1在这些功能元件的水平上流动,这允许它们通过热交换来冷却。实际上,当气流fl1在这些功能元件的水平上流动时,气流冷却功能元件,同时加热其自身。
[0473]
由抽屉的功能元件362产生的热量尤其取决于由该抽屉控制的马达104的电功率。
[0474]
在低功率电马达的情况下,例如高达11kw,产生的热量将通过自然对流引起的气流fl1从控制该马达的1u高度的抽屉138中移除。
[0475]
这种自然对流是由于抽屉1u前部300的通风格栅326和抽屉后部348的通风孔358而产生的。
[0476]
实际上,气流fl1经由通风格栅326进入,并经由通风孔358离开。
[0477]
在较高功率的电马达的情况下,例如在11kw和75kw之间,控制该马达的抽屉138将具有2u和6u之间的高度,这取决于马达的功率。在这种配置中,允许抽屉冷却的气流fl1经由前部300的通风格栅326进入,并且一方面经由后部348的通风孔358离开,另一方面经由盖330的后壁336的一个或多个通风孔338离开。
[0478]
换句话说,后部348的通风孔358和盖330的后壁336的一个或多个通风孔338一起形成抽屉138的后通风区域359。因此,抽屉的后通风区域位于抽屉后部348的水平。
[0479]
在1u高度的抽屉138的情况下,抽屉的后通风区域359类似于抽屉后部348的通风孔358。
[0480]
实际上,在抽屉的高度在2u和6u之间的情况下,抽屉138包括一个或多个风扇366,以迫使气流fl1流过抽屉138。
[0481]
每个风扇366布置在盖的后壁336上,并且具有略小于2u的高度。风扇366被配置为将包含在抽屉138中的空气排出抽屉。
[0482]
当抽屉138的高度等于2u或3u时,它包括一个风扇366。该风扇布置在抽屉后部348的通风孔358和盖330的通风孔338之间。换句话说,该风扇布置在抽屉的后通风区域359上。
[0483]
当抽屉138的高度等于4u(如图14所示)、5u或6u时,它包括两个重叠的风扇366,第一风扇布置在抽屉后部348的通风孔358和盖的第一通风孔338之间,第二风扇完全布置在盖的第二通风孔338上。换句话说,这两个风扇布置在抽屉的后通风区域359上。
[0484]
当抽屉138的高度等于6u时,它可选地包括布置在第三通风孔338上的第三风扇366。
[0485]
借助于一个或多个风扇366,改善了抽屉138中的空气补充,并且功能元件的冷却更有效。
[0486]
有利地,控制电路板364控制一个或多个风扇366以优化它们的操作。
[0487]
有利地,控制电路板364被配置成当抽屉138的功能元件不产生任何热量时,特别是当电气负载104没有被供应电力时,停止风扇366。
[0488]
根据另一种有利的方法,抽屉138包括测量抽屉138内部温度的温度传感器,并且风扇366的转速根据抽屉138内部的温度来调整,即,当温度高时转速增加以加速空气的补充,并且当抽屉内部的温度令人满意时转速降低。
[0489]
有利的是,抽屉138包括一个或多个散热器368,其中一个在图17中示出,散热器368布置在一个或多个功能元件362上,并且能够增加与流经抽屉138的气流fl1的热交换,从而改善这些功能元件的冷却。
[0490]
在这种情况下,有利地,抽屉138包括偏转器370,偏转器370将气流fl1集中到这些散热器368上。实际上,偏转器370例如是引导气流沿其行程通过抽屉的薄片。抽屉138中偏转器的存在导致改变通过抽屉138的气流,而不改变其主要方向,即从前部300到后通风区域359。
[0491]
空气经由抽屉138的前部300进入抽屉138并经由其后通风区域359离开抽屉138是有利的。具体地,这两个部分沿着y轴布置在抽屉的两端,并且流过抽屉的气流然后沿着y轴直接在这两端之间流动,即,它不经历任何方向上的显著改变,这比空气入口和空气出口位于同一面(例如正面)上的气流更有效。具体而言,气流流动方向的任何变化都会减缓气流速度。
[0492]
换句话说,气流fl1从抽屉的一侧流向另一侧,方向没有明显变化。“没有显著变化”的意思是气流fl1不遵循任何具有大于30
°
、优选大于15
°
的角幅的曲线。
[0493]
实际上,当气流fl1与功能元件362接触时,空气流fl1被中断,但是这些中断不构成气流的主方向的改变,并且是在空气和功能元件之间提供热交换所必需的。
[0494]
此外,前部300的通风格栅326的总高度基本上等于抽屉138的后通风区域359的高度。换句话说,抽屉的后部通风区域359和抽屉138的通风格栅326在抽屉的整个高度上延伸,无论抽屉的高度如何。因此,气流fl1从一侧穿过抽屉138到另一侧,而不改变竖直方向,即气流fl1是水平的。
[0495]
由于这种基于从一侧通过抽屉138到另一侧的气流的热管理,抽屉138的功能元件的冷却得到改善。
[0496]
此外,这种基于从一侧通过元件到另一侧的气流的热管理也使得冷却通信模块134成为可能。
[0497]
具体地,通信模块134包括在其正面176上的前通风格栅180和在其背面178上的后通风格栅184,它们分别具有类似于抽屉138的前部300的通风格栅326和抽屉138的背部348的通风孔358的作用。
[0498]
因此,后通风格栅184具有类似于抽屉138的后通风区域359的作用。
[0499]
因此,气流fl1也从一侧穿过通信模块134到另一侧,而方向没有显著改变。
[0500]
该气流使得可以冷却通信模块134中产生热量的元件,实际上是一个或多个电源块150和电路板188。
[0501]
作为本发明的变型(未示出),通信模块134另外包括至少一个风扇,风扇被安装以迫使气流fl1通过通信模块,并且被布置在后通风格栅184和/或前通风格栅180上。优选地,这些一个或多个风扇由电路板188控制。
[0502]
作为本发明的变型(未示出),通信模块134另外包括至少一个散热器,其布置在一个或多个电源块150上或电路板188上。优选地,通信模块134还包括至少一个偏转器,其被
配置为将气流fl1导向一个或多个散热器。
[0503]“功能单元”指的是通信模块134或监测和控制单元138的单元,在示例中是抽屉138,并且由气流fl1冷却。
[0504]
抽屉138具有沿y轴测量的等于l2的宽度,即400mm。该宽度是在抽屉的前部300和后部348之间测量的。
[0505]
当马达启动模块200安装在宽度l2等于400mm的柜100中时,如图4的实施例,每个抽屉的后部348位于柜100的背面f2的水平。此外,形成柜100背面的薄板166包括通风格栅372,如图4所示。这些通风格栅面向每个抽屉的通风区域359布置。因此,抽屉138的通风区域359通过这些通风格栅372将该抽屉的内部连接到柜的外部。在这种配置中,流过抽屉138的空气经由柜100的背面直接排出柜100。
[0506]
当马达启动模块200安装在宽度l1等于600mm的柜100中时,如图1至图3和图5的实施例,每个抽屉的后部348位于包括马达启动模块200的功能区域156和热管理区域162之间的界面的水平。因此,通风区域359将抽屉138的内部连接到柜的热管理区域162。在这样的配置中,流过抽屉138的气流fl1离开进入柜的热管理区域162。
[0507]
此外,在这种配置中,流经通信模块134的空气也经由通信模块的后通风格栅184排出到柜的热管理区域162中。
[0508]
热管理区域162是基本上空的柱,其在柜100的整个高度上延伸。因此,从抽屉138排出的空气被这些抽屉的功能元件362加热,通过对流上升到热管理区域162的顶部,与从通信模块134排出的空气相同。
[0509]
此外,热管理区域162在柜100的顶部处包括上面,该上面实际上是柜的上面f4的一部分。该上面包括逃逸格栅(未示出)。该逃逸格栅允许热空气从热管理区域162排出。因此,来自抽屉138和通信模块134的气流fl2上升通过热管理区域162,并经由热管理区域162的顶部,即经由柜100的上面f4离开,如图2所示。
[0510]
换句话说,热管理区域162具有烟囱的作用,用于热空气从抽屉138和通信模块134逸出。
[0511]
可选地,对应于柜的上面f4的热管理区域的上面包括抽取风扇374,其抽取包含在热管理区域中的空气,以便将其从柜100中排出。借助于这种风扇,热气流fl2的移除变得容易。
[0512]
由于热管理区域162允许经由柜100的顶部从所有抽屉138和通信模块134抽取热空气,因此可以安装柜100,使得其背面被阻挡,例如通过将柜靠着墙壁定位,或者与第二柜100背对背定位,而不会负面影响抽屉138和通信模块134的热管理。
[0513]
作为变型,风扇366布置在抽屉138的前部的通风格栅326上,并且有助于气流fl1进入抽屉。
[0514]
作为变型,风扇366既布置在抽屉前部的通风格栅326上,也布置在后通风区域359上。
[0515]
此外,当柜100不包括布线区域160时,类似于图5的实施例,电缆139的连接在热管理区域162中进行,但是电缆139不布置在气流fl2中,因此不影响柜的冷却。具体地,电缆位于连接区域158的后部,而气流fl2位于功能区域156的后部。
[0516]
作为变型,上述抽屉138和包括一个或多个抽屉138的柜100的热管理应用于安装
在电流分配柱或负载驱动柱中的抽屉138。
[0517]
作为变型,如上所述并且包括格栅326和孔338和358的使用的抽屉138和包括一个或多个抽屉138的柜100的热管理被应用于作为柜的固定单元的监测和控制单元138。
[0518]
图18是侧向结构346的移动侧向触头352的透视图。每个移动侧向触头352实际上布置在侧向结构346中形成的窗口400和竖直壁344中形成的窗口402的水平上。
[0519]
每个抽屉138包括两个移动侧向触头352,每个都布置在侧向结构346中。在这两个移动侧向触头中,第一个可以将抽屉138连接到输入输出模块206的通信接口353,第二个可以将抽屉138连接到保护单元140的通信接口353。这两个移动侧向触头的设计和操作是相同的。
[0520]
作为变型,抽屉138仅包括布置在侧向结构346中的一个移动侧向触头352,这使得可以将抽屉138连接到输入输出模块206的通信接口353或者保护单元140的通信接口353。
[0521]
实际上,每个输入输出模块206包括一个通信接口353,并且保护单元140包括布置在窗口256中的六个通信接口353。
[0522]
每个移动侧向触头352包括板404。板404包括主体406和两个翼408,主体406具有沿着y轴伸长的形状,翼408沿着x轴垂直于主体406延伸。
[0523]
板的主体406包括开口410。
[0524]
在实践中,主体406沿z轴的高度比竖直壁344的窗口402的高度短。
[0525]
如图19所示,板404布置在抽屉138内部,与竖直壁344面向抽屉138内部的面接触。
[0526]
板的两个翼408朝向抽屉138的外部延伸,布置在竖直壁344中的两个槽412中,并且在竖直壁344和侧向结构346之间延伸。
[0527]
每个翼包括平行于y轴的端边缘414和斜面416,斜面416将端边缘414连接到板404的主体406。
[0528]
竖直壁344包括两个保持支架418,它们面向窗口402定位,并通过切掉和折叠竖直壁344而形成。实际上,保持支架418包括垂直于竖直壁344向抽屉138内部延伸的第一部分和垂直于第一部分延伸的第二部分,即平行于竖直壁344,从而面向窗口402延伸。
[0529]
板404通过布置在槽412中的翼408、通过防止板沿着x轴朝向抽屉138的内部平移的支架418以及通过防止板沿着x轴朝向抽屉的外部平移的竖直壁344相对于抽屉138保持就位。
[0530]
板404沿着y轴相对于抽屉138固定。
[0531]
此外,弹簧420布置在每个支架418和板的主体406之间。两个弹簧420允许板404保持抵靠竖直壁344。
[0532]
每个移动触头352还包括设置在竖直壁344和侧向结构346之间的框架422。
[0533]
实际上,侧向结构346包括主壁424和两个副壁426。主壁424平行于支撑板340的竖直壁344,两个副壁426从主壁424向竖直壁344延伸,其中一个如图15所示。
[0534]
因此,侧向结构346在主壁424和副壁426以及支撑板340的竖直壁344之间限定了内部体积。
[0535]
框架422布置在侧向结构346的内部体积内,并且可在该内部体积内沿着y轴移动。
[0536]
实际上,框架422不能沿x轴移动,因为它一方面与竖直壁344接触,另一方面与主壁424接触。
[0537]
框架422的高度h422比沿着z轴测量的距离短,该距离将侧向结构346的两个副壁426分开。
[0538]
框架422的高度大于侧向结构中的窗口400的高度h400,使得框架不能经由窗口400从侧向结构的内部体积中退出。
[0539]
如图20所示,框架422包括两个高度为h428的开口428,它们沿着平行于x轴的轴穿过框架422。
[0540]
每个移动侧向触头352还包括触头壳体430。触头壳体包括固定装置432,两个触头保持器434在固定装置432的每一侧沿着y轴从固定装置432延伸。
[0541]
由“h434”表示的每个触头保持器434的高度比开口428的高度h428短。
[0542]
由“h432”表示的固定装置432的高度大于开口428的高度h428。
[0543]
触头壳体430布置在侧向结构346的内部体积中,在框架422和竖直壁344之间,并且沿着x轴穿过窗口400部分地延伸出该内部体积。实际上,框架422承载触头壳体430。每个触头保持器434穿过框架422中的开口428。换句话说,框架422引导触头壳体430在侧向结构346中沿着y轴移动。
[0544]
触头壳体430可在框架422中沿x轴移动。如图21、22和23所示,其沿x轴的平移运动一方面受到竖直壁344的限制,另一方面受到与框架422接触的固定装置432的限制。
[0545]
每个移动侧向触头352包括弹簧435,实际上是四个弹簧435。弹簧435被布置在触头壳体430和框架422之间,并且被配置为施加力,该力沿着x轴将触头壳体430与框架422隔开。由于框架422不能沿x轴移动,由弹簧435施加的力导致触头壳体430相对于抽屉138沿x轴朝向该抽屉的内部移动。
[0546]
每个移动侧向触头352还包括两个电触头436。
[0547]
每个电触头436牢固地布置在触头保持器434中。
[0548]
每个电触头436包括柔性连接器438。
[0549]
柔性连接器438被配置成能够将抽屉138连接到输入输出模块206或保护单元140。这种连接描述如下。
[0550]
电缆440另外连接到抽屉138的控制电路板364。在图18至23中,仅部分示出了电缆440。
[0551]
实际上,电缆连接到柔性连接器438,并从电触头436的后部延伸穿过竖直壁344中的窗口402和板404中的开口410,进入抽屉138的内部。
[0552]
每个移动侧向触头352还包括引导轴442。引导轴优选为沿z轴延伸的圆柱体,并且安装在框架422中。
[0553]
作为变型,引导轴与框架422形成为一体。
[0554]
引导轴442的高度h442大于沿z轴测量的距离,该距离将侧向结构346的副壁426分开。因此,引导轴442延伸出侧向结构346的内部体积,穿过在副壁426中形成的两个槽444。
[0555]
每个移动侧向触头352还包括拉伸弹簧446,优选两个弹簧446。拉伸弹簧446平行于y轴延伸。每个拉伸弹簧446的一端附接到引导轴442,另一端附接到侧向结构346。
[0556]
每个移动侧向触头352被配置成确保对于抽屉138在其操作位置和其测试位置之间的任何位置,柔性连接器438连接到保护单元140或输入输出模块206,并且使得当抽屉138在其测试位置和其操作位置之间移动时,该连接不会中断。
[0557]
为此,每个移动侧向触头352可沿着平行于y轴的抽屉138的纵轴a138和平行于x轴的抽屉的横轴b138移动。
[0558]
图21、22和23示出了侧向触头352的三个不同位置。
[0559]
抽屉138的接合位置被定义为位于抽屉的断开位置和测试位置之间的位置。在图21中,抽屉138显示在其接合位置和测试位置之间。抽屉的测试位置如图22所示,抽屉的操作位置如图23所示。
[0560]
在这些图中,仅示出了移动侧向触头352和抽屉138的一部分。特别地,为了更加清楚,抽屉的侧向结构插入其中的导轨224和250被隐藏。实际上,每个移动侧向触头的移动受到移动侧向触头与导轨224或250的相互作用的影响,承载该移动侧向触头的侧向结构346插入到导轨224或250中。
[0561]
当抽屉138在其断开位置和其接合位置之间被插入到马达启动模块200中时,移动侧向触头352不相对于抽屉138移动。
[0562]
在该位置,框架422和引导轴442被拉伸弹簧446保持为尽可能靠近抽屉后部348,在静止位置。实际上,当引导轴442与槽444的一端接触时,框架422和引导轴442尽可能靠近抽屉348的后部。该位置未在图中示出。
[0563]
此外,在该位置,触头壳体430和触头426处于抽屉138中的插入位置,即触头壳体430远离框架422并且更靠近竖直壁344。换句话说,在插入位置,触头壳体430和触头426尽可能远地包含在侧向结构346的内部体积中,并且尽可能少地通过窗口400延伸出该内部体积。
[0564]
实际上,触头壳体430和触头426的插入位置是由弹簧435施加的,弹簧435在触头壳体430上施加使其与框架422分离的力。
[0565]
在抽屉138插入马达启动模块200的过程中,当抽屉138到达接合位置时,引导轴442与导轨224或250的舌状物232或254接触。
[0566]
具体地,引导轴442的高度h442大于沿z轴测量的导轨224和250的边缘之间的距离,但是小于导轨的舌状物之间的距离。
[0567]
从该接合位置,框架422、触头壳体430和电触头436沿着y轴的平移停止。这些元件然后开始相对于抽屉138移动。因此,在抽屉的接合位置和抽屉的操作位置之间,通过抽屉的测试位置,框架422相对于侧向结构346的内部体积平移。实际上,当抽屉138运动时,框架422变得相对于马达启动模块200固定。在抽屉的这个运动过程中,拉伸弹簧446被拉伸。
[0568]
框架422、触头壳体430和电触头436在抽屉的接合位置和抽屉的测试位置之间的运动分两个阶段进行。
[0569]
在第一阶段期间,框架422、触头壳体430和电触头436相对于抽屉138沿着y轴和轴b138移动,远离框架422的静止位置,同时相对于马达启动模块200保持固定。这种移动一直发生,直到沿着y轴固定的接触壳体430的固定装置432与沿着y轴可移动的板404的翼部408的端边缘414接触。这个位置如图21所示。
[0570]
在第二阶段期间,在固定装置432已经与端边缘414接触之后,框架422及其承载的元件沿着y轴相对于抽屉138的运动继续,并且接触壳体430另外沿着x轴和轴a138平移,远离侧向结构346的内部体积。
[0571]
因此,触头壳体430沿着x轴的平移通过翼的斜面416实现,在沿着y轴平移的过程
中,斜面416将触头壳体和触头436从它们的插入位置推向从抽屉138伸出的位置,如图22所示。该运动导致触头壳体和框架422之间的弹簧435的压缩。
[0572]
此外,触头壳体430和电触头436沿着x轴的这种平移是允许的,因为从抽屉138的接合位置到操作位置,移动侧向触头352的触头壳体430面向侧向结构接合到其中的导轨中的窗口226或252。
[0573]
实际上,触头壳体430的每个触头保持器434面向导轨中的两个窗口226或252中的一个。
[0574]
由于这种平移,电触头436延伸出侧向结构346,并且可以与保护单元140或输入输出模块206接触。
[0575]
在抽屉的测试位置和抽屉的操作位置之间,接触壳体430相对于马达启动模块200沿着x轴固定,并且接触壳体的固定装置432在板404的翼408的端边缘414上滑动。
[0576]
换句话说,固定装置432迫使触头壳体430相对于抽屉138朝向其伸出位置运动。
[0577]
此外,将板404保持在竖直壁344上(即,在参考位置)的弹簧420被构造成使得,在触头壳体430沿着x轴的伸出被阻挡的情况下,例如被导轨中的窗口中存在的障碍物阻挡,由弹簧420施加的力比由固定装置432施加在板404的翼408上的力弱,这导致板404沿着x轴朝向保持支架418即朝向安全位置移动。
[0578]
由于板404的这种移动,在这种情况下,移动侧向触头352不会被损坏。
[0579]
板404的这种移动也使得适应部件相对定位的变化成为可能。例如,如果通信接口353更靠近抽屉138,沿着板的x轴的移动将使得可以避免在电触头436上施加过度的应力。
[0580]
总之,关于马达启动模块200,电触头436的移动包括三个阶段:
[0581]-从抽屉的断开位置到接合位置,电触头436相对于马达启动模块在导轨224或250中沿着y轴平移,并且相对于抽屉138固定;
[0582]-从抽屉的接合位置到抽屉的测试位置,电触头436沿着x轴远离侧向结构346平移,穿过导轨中的窗口226或252,并且相对于马达启动模块200沿着y轴固定;和
[0583]-从抽屉的测试位置到抽屉的操作位置,电触头436相对于马达启动模块固定。
[0584]
由于电触头436的这种三个阶段运动,更具体地说,由于电触头436相对于马达启动模块200在抽屉的测试位置和操作位置之间固定,电触头436和保护单元140或输入输出模块206之间的接触被不间断地保持,这使得在这两个位置之间可以保持控制电路板364和保护单元140之间或控制电路板364和输入输出模块206之间的连接。
[0585]
当电触头436延伸穿过导轨224中的窗口226时,它们也延伸穿过导轨224所附接的侧向支撑件210中的窗口222。
[0586]
电缆440是柔性的,使得它们连接到电触头436的端部可随电触头436移动。此外,竖直壁344的窗口402和板404的开口410的尺寸使得可以不与电缆440的运动干涉。
[0587]
当抽屉138从启动模块200的体积v1中取出时,即当它从其操作位置移动到其断开位置时,移动侧向触头352的电触头436的移动包括三个阶段:
[0588]-从抽屉的操作位置到测试位置,电触头436相对于马达启动模块200固定,并且相对于抽屉138沿着y轴平移;
[0589]-从抽屉的测试位置到接合位置,电触头436相对于马达启动模块沿着y轴固定,并且在弹簧435的作用下沿着x轴远离框架422并朝向侧向结构346平移;和
[0590]-从抽屉的接合位置到断开位置,电触头436相对于马达启动模块沿着y轴平移,并且相对于抽屉138固定。
[0591]
如图24所示,输入输出模块206包括壳体500,在壳体500上布置了两个连接垫502,这两个连接垫502形成了通信接口353。
[0592]
当抽屉138处于操作位置或测试位置时,两个电触头436的柔性连接器438与两个连接垫502接触。实际上,连接器438被称为“柔性的”,因为它们可以在力的作用下沿着x轴弹性变形,例如在与连接垫502接触产生的力的作用下。这种变形使得可以在柔性连接器和连接垫502之间保持良好的电接触,因为这使得可以容忍连接器和连接垫的相对对准和相对位置的误差。
[0593]
从图8中可以看出,输入输出模块206的壳体500附接到马达启动模块200的侧向支撑件212。每个输入输出模块206与抽屉138相关联,并且位于侧向支撑件212上该抽屉的基部328的高度处。
[0594]
输入输出模块206还包括线性连接器504,其使得可以将输入输出模块206连接到马达启动模块200的计算机总线段204。因此,输入输出模块206连接到电子电路144、传导第一辅助电压的供电轨道148和传导第二辅助电压的供电轨道154。
[0595]
输入输出模块206包括布置在壳体500中的第一无线通信板506。从壳体500的外部看不到该第一无线通信板,在图24中用虚线示出。
[0596]
第一无线通信板506与第二无线通信板508通信,第二无线通信板508实际上布置在与输入输出模块相关联的抽屉138中,如图16所示,其中第二板也用虚线示出。
[0597]
实际上,第一和第二无线通信板被布置成彼此面对,即,它们沿着平行于电气柜的横向y轴的同一轴对齐。
[0598]
第一和第二通信板被配置成能够通过发送和接收射频来交换数据,例如通过使用无线协议,优选地以60ghz的频率。例如,使用的协议是以太网协议。因此,这种数据交换是远程进行的,通信板之间没有接触。
[0599]
此外,第一和第二通信板506和508被配置成当抽屉138处于操作位置时、当抽屉处于测试位置时以及当抽屉在这两个位置之间移动时允许这种数据交换。
[0600]
在该示例中,抽屉的移动侧向触头352和输入输出模块的两个连接垫502之间的接触使得可以将第一辅助电压从供电轨道148输送到抽屉,并且在第一和第二通信板506和508之间交换的数据对应于通过电子电路144传输的数据。
[0601]
这种解决方案是有利的,因为它可以将一方面交换的数据和另一方面的电压传输分成两个不同的连接。
[0602]
此外,因为抽屉138的两个移动侧向触头352中的一个从抽屉的测试位置到抽屉的操作位置连接到输入输出模块,所以第一辅助电压从其测试位置被输送到抽屉。因此,在抽屉的测试位置,控制电路板364和功能元件362被供给第一辅助电压。
[0603]
测试位置中的该供电是有利的,因为它使得可以例如在允许抽屉138移动到操作位置之前验证抽屉138的正确操作。
[0604]
作为变型,两个垫中的第一连接垫502使得可以向抽屉138输送第一辅助电压,并且第二连接垫使得可以在抽屉和输入输出模块206之间交换数据,作为对由通信板执行的数据交换(例如紧急停止信号)的补充或冗余。
[0605]
作为变型,抽屉138和输入输出模块206不包括通信板,并且通过电子电路144传输的数据经由连接垫502和移动侧向触头352在抽屉138和输入输出模块之间交换。
[0606]
从图8中可以看出,每个输入输出模块206还包括连接端子块510。
[0607]
在输入输出模块的连接端子块510中,一些一方面连接到供电轨道154,另一方面连接到电气负载104,电气负载104连接到与所述输入输出模块相关联的抽屉138,这使得可以向该电气负载供应第二辅助电压。实际上,供电电缆(未示出)将连接端子块510连接到电气负载104。
[0608]
作为变型,这些供电电缆连接到移动连接器,并且移动连接器被配置成连接到连接端子块510。
[0609]
向电气负载104供应第二辅助电压使得可以向电气负载104的辅助功能供电。当电气负载104是电马达时,这些辅助功能例如是加热电路,当电马达不操作时,加热电路使得可以将电马达保持在最低温度以上。这些加热电路是有利的,因为它们可以防止可能损坏该马达的冷凝效应。
[0610]
在输入输出模块的连接端子块510中,其他一方面连接到电子电路144,另一方面连接到布置在电气负载104的水平处的传感器(未示出),例如当负载104是马达时的位置、速度或温度传感器,或者紧急停止按钮。来自这些传感器的数据一方面被传输到抽屉138,另一方面被传输到计算机总线段。
[0611]
因此,每个输入输出模块206使得可以将计算机总线段204连接到监测和控制抽屉138和连接到该监测和控制抽屉的电气负载104,并且允许在监测和控制抽屉138和电气负载104之间交换数据。
[0612]
该输入输出模块206是有利的,因为它使得可以将多个连接集中在单个壳体中,并且使得可以将抽屉138连接到计算机总线段204,而不需要实施电缆。
[0613]
如图25所示,计算机总线段204包括壳体600,电路板602布置在壳体600中。
[0614]
像计算机总线142一样,计算机总线段204沿着z轴纵向延伸。
[0615]
电路板602承载电子电路604、第一供电轨道606和第二供电轨道608。
[0616]
计算机总线段204还包括线性连接器610,实际上是六个线性连接器。
[0617]
每个线性连接器610连接到电子电路604和供电轨道606和608。
[0618]
实际上,计算机总线段204被配置成能够连接到一个或多个输入输出模块206,多达六个输入输出模块。每个输入输出模块通过线性连接器610连接到计算机总线段。具体而言,线性连接器610被配置为连接到输入输出模块的线性连接器504,从而确保计算机总线段204和输入输出模块206之间的连接。
[0619]
在图8中,两个输入输出模块206连接到计算机总线段。
[0620]
计算机总线段204还包括位于沿z轴的第一端的公连接器612,在该示例中位于顶端。在实践中,公连接器612包括连接到第一供电轨道606的第一连接器614、连接到第二轨道轨道608的第二连接器616和连接到电子电路604的第三连接器618。
[0621]
该第一端还包括销620,实际上是两个销620,它们从壳体600沿着z轴远离壳体延伸。
[0622]
计算机总线段204还包括在沿z轴的第二端的母连接器622,在该示例中是在底端。实际上,母连接器622包括连接到第一供电轨道606的第一连接器624、连接到第二供电轨道
608的第二连接器626和连接到电子电路604的第三连接器628。
[0623]
公连接器612和母连接器622具有互补的形状,即公连接器可以插入母连接器中。
[0624]
该第二端也包括空腔630。销620和空腔630具有互补的形状,即销可以插入空腔中。
[0625]
母连接器622和空腔630在图26中详细可见。
[0626]
由于销620和空腔630,计算机总线204的多个段可以连结在一起。由于公连接器612和母连接器622,计算机总线204的多个段可以电连续连接。
[0627]
当计算机总线204的两段被连结时,它们沿着z轴并置,第一段的公连接器被插入第二段的母连接器中,并且第一段的销620被插入第二段的空腔630中。
[0628]
实际上,每个马达启动模块200包括一段计算机总线204。因此,当马达启动柱110包括多个叠加的马达启动模块200时,所有马达启动模块200的计算机总线204的段被连结并且彼此电连接。
[0629]
图27示出了计算机总线连接器650。该连接器在图6中也是可见的,连结到通信模块134。
[0630]
计算机总线连接器650使得可以将连接柱110的计算机总线段204连接到该连接柱的通信模块134。因此,每个连接柱110包括附接到该柱的通信模块134的计算机总线连接器650。
[0631]
为此,计算机总线连接器650包括公连接器652和母连接器654,它们分别与计算机总线段204的公连接器612和母连接器622相同。
[0632]
计算机总线连接器650还包括销656和空腔658,它们分别与计算机总线段204的销620和空腔630相同。
[0633]
因此,计算机总线连接器650可以以计算机总线的两段可以彼此连结的相同方式,即通过插入彼此中,连结并电连接到计算机总线段。
[0634]
此外,计算机总线连接器650包括公连接器和母连接器的事实是有利的,因为例如当通信模块134布置在一个或多个马达启动模块200上方时,它可以连接在计算机总线段的顶部,或者当通信模块134布置在一个或多个马达启动模块200下方时,连接在计算机总线段的底部。
[0635]
实际上,当计算机总线连接器650安装在柱110中时,仅使用公连接器或母连接器。然后用帽(未示出)保护未使用的连接器是有利的。
[0636]
在马达启动柱110中,计算机总线142由计算机总线连接器650和计算机总线204的一段或多段的组件形成。
[0637]
在马达启动柱110中,电子电路604对应于计算机总线142的电子电路144,计算机总线的一个或多个段的第一供电轨道606对应于计算机总线142的供电轨道148,第二供电轨道608对应于计算机总线142的供电轨道154。
[0638]
计算机总线142到通信模块的连接通过多个前连接器660进行。实际上,这些连接器包括:
[0639]-第一连接器662,其一方面通过电缆(未示出)连接到通信模块的第一连接器192,另一方面连接到计算机总线142的供电轨道148。借助于第一连接器662,计算机总线142的供电轨道148被提供有第一辅助电压。
[0640]-第二连接器664,其一方面通过电缆(未示出)连接到通信模块134的保护壳体194,另一方面连接到计算机总线142的轨道轨道154。借助于第二连接器664,计算机总线142的轨道轨道154被提供有第二辅助电压。
[0641]-第三连接器666,其一方面通过电缆(未示出)连接到通信模块134的管理交换机135,另一方面连接到计算机总线142的电子电路144。借助于第三连接器666,计算机总线142的电子电路144连接到管理交换机135,并且因此可以与通信模块134交换信息。
[0642]
如图34所示,计算机总线段204可以配备跳线750。
[0643]
图34和35中的三种跳线750有所不同:
[0644]-公端跳线752;
[0645]-母端跳线754;和
[0646]-输入输出跳线756。
[0647]
公端跳线752和母端跳线754使得可以避免在马达启动柱110中,计算机总线142的与连接到计算机总线连接器650的端部相对的端部(其包括相互连结的计算机总线204的多个段)是自由的。
[0648]
因此,计算机总线142的第一端连接到计算机总线连接器650,而计算机总线的第二端连接到公端跳线752或母端跳线754。
[0649]
这种连接使得可以保护与计算机总线连接器相对的计算机总线段204的连接器622或612。
[0650]
实际上,公端跳线752使得可以保护母连接器622,母端跳线754使得可以保护公连接器612。
[0651]
为了允许端跳线连接到计算机总线段204,公端跳线752包括形状与计算机总线段第一端的空腔630互补的两个销758,母端跳线754包括形状与计算机总线段第二端的销620互补的两个空腔760。
[0652]
此外,端跳线752和754使得可以确保计算机总线段204的电子电路604的连续性,其在马达启动柱110中对应于计算机总线142的电子电路144。
[0653]
具体地,电子电路144,特别是当它们允许使用以太网协议交换数据时,将马达启动柱110的通信模块134串联连接到监测和控制抽屉138。因此,电子电路144形成回路,回路的起点是通信模块134。
[0654]
当计算机总线段204包括自由端时,安装在该自由端上的端跳线752或754通过连接到该段计算机总线的自由端,依靠连接到电子电路604的连接器,使得可以闭合该回路。
[0655]
实际上,公端跳线752包括公连接器762,母端跳线754包括母连接器764,它们分别与计算机总线段204的公连接器612和母连接器622相同。
[0656]
作为本发明的变型(未示出),马达启动柱110不包括通信模块134,并且电子电路144形成回路,回路的起点是工业计算机130,工业计算机130则具有与通信模块134相同的功能作用。
[0657]
有利的是,这些公连接器762和母连接器764还使得可以将端跳线752和754连接到供电轨道606和608。
[0658]
因此,供电轨道606和608可以以并联或串联的方式向线性连接器610供电。具体而言,在串联电源的情况下,公端跳线762和母端跳线764使得可以闭合供电轨道606和608的
回路。
[0659]
通过相同的原理,当没有输入输出模块206连接到给定的线性连接器610时,输入输出跳线756使得可以在该线性连接器610的水平上闭合由电子电路144形成的回路。
[0660]
为此,每个输入输出跳线756具有辅助连接器766,其被配置为连接到线性连接器610。
[0661]
实际上,在马达启动模块200中,输入输出跳线756的数量取决于输入输出模块206的数量。该数量等于线性连接器610的总数减去马达启动模块200的输入输出模块206的数量。
[0662]
因此,在图8所示的例子中,其中两个输入输出模块206连接到包括六个线性连接器610的计算机总线段204,四个输入输出跳线756连接到计算机总线段,但是为了简化附图,没有示出。
[0663]
因为输入输出模块206总是与监测和控制抽屉相关联,所以也可以认为,当没有监测和控制抽屉连接到线性连接器时,输入输出跳线756使得可以在该线性连接器610的水平上闭合由电子电路144形成的回路。
[0664]
如图34所示,计算机总线段204还包括存储块780,其实际上是电子芯片,也称为集成电路。
[0665]
有利的是,计算机总线段204包括相同数量的存储块780和线性连接器610。
[0666]
在该示例中,计算机总线段204因此包括六个存储块780。在图34中,为了简化附图,通过计算机总线段的壳体600中的两个剖面,仅示出了四个存储块780。
[0667]
因此,每个存储块780与一个线性连接器610相关联。
[0668]
因此,当组装马达启动模块200时,每个存储块780与输入输出模块206相关联,并且与监测和控制抽屉138相关联,输入输出模块206对应于连接到线性连接器610的输入输出模块,监测和控制抽屉138对应于连接到连接到线性连接器610的输入输出模块的抽屉。
[0669]
在电气柜100的操作期间,每个存储块780保存关于监测和控制抽屉138、关于连接到监测和控制抽屉138的电气负载104和/或关于抽屉和电气负载连接到的输入输出模块206的信息和参数。
[0670]
例如,存储块780保存关于连接到与存储块相关联的监测和控制抽屉138的电气负载104的所有或一些以下信息:
[0671]-电气负载104的类型,例如单相电马达、三相电马达或可驱动的电气负载;
[0672]-电气负载104的操作条件,例如其操作所需的电功率;和
[0673]-必须控制电气负载的监测和控制抽屉138的类型,即抽屉的代表性特征,包括例如功能元件362的接触器的数量和布置或热保护继电器的类型。
[0674]
在实践中,存储块780尤其保存与存储块相关联的监测和控制抽屉138、监测和控制抽屉的类型,即抽屉的代表性特征,以及功能元件362的操作参数。这些操作参数是,例如,要输送给电气负载104的功率的设置、热保护继电器的跳闸阈值的设置或操作传感器的检测阈值。
[0675]
实际上,存储块780保存关于与存储块相关联的输入输出模块206的信息,该信息例如是连接到输入输出模块的电气负载104的类型和/或布置在电气负载的水平处并连接到输入输出模块的传感器的类型。
[0676]
这些操作参数通常保存在监测和控制抽屉138的控制电路板364的水平上。
[0677]
此外,每个存储块780与相应的马达启动柱110的通信模块134通信。具体地,每个存储块780通过图34中可见的连接电路782连接到电子电路604,从而允许这种通信。
[0678]
在电气柜100的使用期间,尤其是在维护电气柜100的阶段期间,存储块780尤其有利。
[0679]
具体地,在用新的监测和控制抽屉替换马达启动柱110的旧的监测和控制抽屉138的情况下,通过通信模块134或者通过工业计算机130经由通信模块134执行第一验证方法,该方法至少包括以下步骤:
[0680]
a)基于保存在与抽屉相关联的存储块780中的信息,检测最初安装在给定位置的旧监测和控制抽屉138的类型;
[0681]
b)基于保存在与抽屉相关联的存储块780中的信息,验证作为替换安装的新的监测和控制抽屉138的类型是否对应于旧抽屉的类型和/或与电气负载104的类型兼容;
[0682]
c)确定新抽屉是否适合替换旧抽屉;
[0683]
d)在新的监测和控制抽屉138在步骤c)中被确定为适于替换旧抽屉的情况下,基于存储在存储块780中的信息,调整新抽屉的功能元件362的操作参数,将它们存储在新抽屉的控制电路板364中,使得这些操作参数与旧抽屉的操作参数相同;和
[0684]
e)在新的监测和控制抽屉138在步骤c)中被确定为不适合替换旧抽屉的情况下,阻止新的监测和控制抽屉的启动并发出异常信号。
[0685]
该第一验证方法是有利的,因为它使得可以确保监测和控制抽屉的更换被正确地执行,并且使得可以在不必向新的监测和控制抽屉指示操作参数的情况下执行这种更换,这些操作参数被自动加载。
[0686]
有利地,如果在步骤b)期间,检测到新的监测和控制抽屉138的类型与旧抽屉的类型不相同,但是新抽屉与电气负载104的类型兼容,则在步骤c)期间,新抽屉被确定为适合于替换旧抽屉,并且执行步骤d),并且指示新抽屉和旧抽屉之间的类型差异的信号被发送,例如经由显示在显示器302上的消息。例如,新的监测和控制抽屉138可以包括功能元件362,使得可以控制比旧抽屉功率更高的电气负载,但是也适于控制与抽屉相关联的电气负载。于是,新抽屉与电气负载兼容,因此可以用作旧抽屉的替代,即使新抽屉与旧抽屉的类型不同。
[0687]
作为变型,第一验证方法由与被替换的监测和控制抽屉138相关联的输入输出模块206执行。输入输出模块然后配备有计算单元,该计算单元被配置为执行步骤a)至e)并访问保存在与该抽屉相关联的存储块780中的信息。
[0688]
在用新的输入输出模块替换旧的输入输出模块206的情况下,这涉及再次对该模块的连接端子块510进行布线,由通信模块134或者由工业计算机130经由通信模块134执行第二验证方法,包括至少以下步骤:
[0689]
a)基于存储在与新的输入输出模块相关联的存储块780中的信息,检测与新的输入输出模块206相关联的电气负载104的类型和/或布置在连接到该输入输出模块的电气负载的水平处的传感器的类型;
[0690]
b)验证该电气负载和/或连接到新输入输出模块的这些传感器的类型是否对应于最初连接到旧输入输出模块的电气负载和/或传感器的类型;
[0691]
c)确定电气负载104和/或连接到新输入输出模块的传感器是否确实对应于电气负载104和/或连接到旧输入输出模块的传感器;
[0692]
d)如果是,授权启动电气负载104;和
[0693]
e)如果否,防止电气负载104的启动并发出异常信号。
[0694]
该第二验证方法是有利的,因为它使得可以确保正确地执行输入输出模块206的替换,并且更具体地,确保正确地执行到连接端子板510的连接。
[0695]
作为变型,第二验证方法由新的输入输出模块206执行。新的输入输出模块然后配备有计算单元,该计算单元被配置为执行步骤a)至e),并访问保存在与该输入输出模块相关联的存储块780中的信息。
[0696]
此外,在替换马达启动柱110的通信模块134的情况下,由新的通信模块执行用于检索数据的方法,该方法包括基于存储在存储块780中的信息检索监测和控制抽屉138的操作参数和/或与电气负载104相关的信息,使得新的通信模块134具有该信息。
[0697]
这种用于检索数据的方法是特别有利的,因为它避免了必须手动向新的通信模块134提供大量数据,这将是乏味的,这些数据在这里是自动检索的。
[0698]
在马达启动柱110不包括通信模块134的变型中,这种用于检索数据的方法类似地应用于工业计算机130的替换。
[0699]
此外,存储块780被布置在计算机总线段204上的事实是特别有利的,因为计算机总线段是可靠的元件,相对不易受故障影响,因此在电气柜100的使用寿命期间通常不会被替换。因此,保存在这些存储块780中的信息不会丢失,即使在复杂的维护操作期间,其中例如同时更换监测和控制抽屉138、相关联的输入输出模块206和通信模块134。
[0700]
抽屉138与电气负载104的连接,即通过该抽屉138向该电气负载供电,通过外部连接模块208进行。因此,外部连接模块208与每个抽屉138相关联。
[0701]
图28至33示出了三种类型的外部连接模块208。这三种类型的模块一起形成了一组外部连接模块700,其在这些图中的每一个图中部分地示出。
[0702]
该组模块700的每个连接模块被配置成允许抽屉138连接到消耗给定数据范围内的电力的电气负载104。
[0703]
图28和29示出了第一外部连接模块702。该第一连接模块被配置为将抽屉138连接到低功率的电气负载104,例如低于11kw。
[0704]
第二外部连接模块704在图30和31中示出。该第二连接模块被配置为将抽屉138连接到中等功率的电气负载104,例如在11kw和30kw之间。
[0705]
第三外部连接模块706在图32和33中示出。该第三连接模块被配置为将抽屉138连接到高功率的电气负载104,例如在30kw和75kw之间。
[0706]
因此,安装在马达启动模块上的外部连接模块的选择取决于连接到该模块的电气负载104所需的电功率。
[0707]
外部连接模块702、704和706每个都包括壳体708。壳体708实际上包括两个半壳体,分别形成基部708a和罩708b,通过紧固装置连结,例如在图29中仅对于外部连接模块702可见的螺钉708c。
[0708]
外部连接模块702的壳体708具有等于1u的高度h702。
[0709]
外部连接模块704的壳体708具有等于2u的高度h704。
[0710]
外部连接模块706的壳体708具有等于3u的高度h706。
[0711]
优选地,外部连接模块702与高度为1u或2u的抽屉138相关联,外部连接模块704与高度为2u、3u、4u、5u或6u的抽屉138相关联,外部连接模块706与高度为5u或6u的抽屉138相关联。因此,外部连接模块的高度总是小于或等于与其相关联的抽屉的高度。
[0712]
每个外部连接模块的壳体708的第一端709承载输入连接器710。
[0713]
不管壳体708的高度如何,第一端709的高度等于1u。
[0714]
每个外部连接模块的壳体708的第二端711承载输出连接器712。
[0715]
第二端711的高度等于壳体708的高度h702、h704或h706。
[0716]
实际上,输入连接器710和输出连接器712布置在壳体708的同一面上,即当壳体组装在马达启动模块200上时,输入连接器710和输出连接器712面向柜100的同一面,在该示例中为正面f1。
[0717]
在该示例中,第一端709包括四个输入连接器,第二端包括四个输出连接器。
[0718]
输入连接器710被配置成连接到与连接模块相关联的抽屉138的下游连接器356。换句话说,抽屉的下游连接器356向与该抽屉相关联的外部连接模块702、704或706供电。因此,抽屉138是连接模块的电源。
[0719]
第一端709的恒定高度是有利的,因为它等于抽屉138的基部328的高度。然后,第一端709允许所有抽屉138的连接,而不管它们的高度。
[0720]
输出连接器712被配置为经由连接电缆139连接到电气负载104。
[0721]
实际上,电连接电缆139通过凸耳716连接到输出连接器712,如图29所示。
[0722]
在壳体708中,输入连接器710和输出连接器712通过电缆或导电母线718电连接。在第一和第二外部连接模块702和704中,考虑到传输的电力,可以在连接器710和712之间使用导电电缆,这些电缆在图29和31中由它们各自的中心线表示。在第三外部连接模块706中,考虑到传输的电力,在连接器710和712之间使用了图33中可见的连接母线。在后一种情况下,连接器710和712由母线718的端部形成。
[0723]
实际上,每个外部连接模块包括四个导电电缆或导电母线718,即每个输入连接器和每个输出连接器一个母线。
[0724]
导电电缆或导电母线718与连接到输出连接器712的电气负载104消耗的功率相匹配。
[0725]
因此,对于高功率的电气负载,例如在30kw和75kw之间,导电母线718例如是横截面在16和50mm之间的铜母线,例如对于75kw的电气负载等于50mm2。
[0726]
在低功率的电气负载的情况下,例如低于11kw,导电电缆718具有较小的横截面,例如在1和6mm2之间,例如对于11kw的电气负载等于6mm2。
[0727]
作为变型,第一和第二外部连接模块702和704的导电电缆718可以用导电母线代替。
[0728]
实际上,输送给电气负载的功率越高,导电电缆和导电母线718的横截面越大,这要求包括这种导电电缆或导电母线的外部连接模块越高。这就是为什么第三外部连接模块706的高度h706大于第二模块704的高度h704,第二模块704本身大于模块702的高度h702。
[0729]
每个外部连接模块的第二端711另外包括覆盖部分720,其覆盖输出连接器712。当安装覆盖部分720时,连接器712不能从壳体708的外部接近,因此受到保护,这防止了与凸
耳716的任何接触。当覆盖部分720被移除时,连接器712是可接近的,这使得可以将电缆139连接到连接器。
[0730]
优选地,覆盖部分720是透明的,这使得可以检查电缆139是否被正确连接,而不使得这些电缆可被接近。
[0731]
优选地,覆盖部分720通过紧固装置连接到壳体708,例如仅对于外部连接模块702可见的螺钉721。
[0732]
从图8中可以看出,每个外部连接模块的壳体708在其第一端709的水平,即在包括输入连接器710的端部的水平,附接到马达启动模块200的结构202的背部支撑件210,例如使用螺钉。
[0733]
因此,壳体708作为悬臂从背部支撑件210延伸,远离马达启动模块200。
[0734]
此外,每个外部连接模块704和706(即高度为2u和3u的模块)的壳体708包括加强件722,加强件722从壳体708平行于第一端709延伸,并且也附接到背部支撑件210。
[0735]
加强件722的高度等于1u。它与罩708b形成一体。
[0736]
第一端709和可能的加强件722布置在体积v1中和连接柱110的功能区域156中。
[0737]
壳体708的其余部分和第二端711延伸到连接柱110的布线区域160中。
[0738]
实际上,功能区域156和电缆区域160被马达启动模块的侧向支撑件212分开。因此,外部连接模块702、704和706的第一端709延伸穿过侧向支撑件212,更具体地,穿过侧向支撑件212中的开口220。
[0739]
外部连接模块704和706的壳体708的加强件722也延伸穿过侧向支撑件212中的开口220。
[0740]
作为变型,外部连接模块被配置成使得输入连接器710和输出连接器712被布置在两个相对的面上。当电缆139的连接经由电气柜100的背面进行时,类似于图5的变型,这种配置是有利的。
[0741]
此外,每个抽屉138包括两个定心构件800,定心构件800布置在抽屉的后部348上,并且沿着y轴延伸到抽屉之外。每个定心构件800具有锥形形状,即其自由端比连接到抽屉后部的基部窄,优选地,定心构件800与基部形成一体。
[0742]
这些定心构件800使得,当抽屉138移动到其操作位置时,可以确保抽屉138在马达启动模块200中的正确定位。
[0743]
为此,保护单元140包括定心腔802,并且每个外部连接模块702、704和706包括定心腔804。
[0744]
如图11所示,保护单元140的定心腔802布置在连接器组246和保护单元140的内面238之间。
[0745]
每个外部连接模块702、704和706的定心腔804布置在每个壳体708的罩708b上,靠近第一端709和输入连接器710。
[0746]
保护单元的定心腔802和每个外部连接模块的定心腔804指向马达启动模块200的体积v1。
[0747]
定心腔802和804具有与定心构件800的形状互补的形状,并且定位成使得在抽屉的操作位置,抽屉138的第一定心构件800容纳在定心腔802中,并且抽屉138的第二定心构件容纳在定心腔804中。
[0748]
当抽屉138从其测试位置移动到其操作位置时,抽屉138的定心构件800逐渐插入定心腔802和804中,并且由于定心构件800的锥形形状,这种逐渐插入使得抽屉138能够相对于定心腔802和804并且因此相对于马达启动模块200定心。
[0749]
由于模块组700的外部连接模块208,从电气负载104到抽屉138的连接从功能区域156转移到布线区域160。这是有利的,因为布线区域160容易接近,这简化了电缆139到输出连接器712的连接。
[0750]
作为变型,该组外部连接模块内的外部连接模块208的类型的数量可以不同于三个,特别是等于2、4、5或6个。
[0751]
总之,由供电电缆102输送的主电源首先由电源柱106传导通过电气柜100,然后由母线组114、118和122重新分配给每个马达启动柱110的每个保护单元140,然后由连接器248和354重新分配给每个抽屉138,然后由连接器356重新分配给每个外部连接模块208,然后由每个外部连接模块208重新分配给每个电气负载104。
[0752]
总之,在电气柜100中执行大量的数据交换:
[0753]-来自位于每个电气负载104上的传感器的操作数据由与该负载相关联的输入输出模块206经由计算机总线142一方面传输到抽屉138,另一方面传输到通信模块134;
[0754]
o在抽屉138中,这些数据一方面被控制电路板364考虑以适应抽屉138的操作,
[0755]
o在抽屉138中,这些数据另一方面,如果必要的话,被传输到保护单元140,例如当这些数据源自位于电气负载104附近的紧急停止按钮的激活,目的是在保护单元140的水平切断电力供应时,并且
[0756]
o在通信模块134中,这些数据被传输到工业计算机130,
[0757]-每个抽屉138将关于其自身操作的数据传输到包括该抽屉的连接柱110的通信模块;
[0758]-当柜包括多个连接柱时,每个连接柱110的通信模块134向工业计算机130和柜100的其他连接柱110的通信模块交换关于该连接柱的操作的数据;和
[0759]-工业计算机130将命令传输到每个连接柱110的通信模块134,然后这些数据由管理交换机135分配,并通过计算机总线142和输入输出模块206传输到抽屉138。
[0760]
包括通信模块134和至少一个马达启动模块200的马达启动柱110的安装包括组装阶段和连接阶段。
[0761]
组装阶段包括以下步骤:
[0762]
a)将通信模块134连结到马达启动柱的基本框架164;
[0763]
b)组装每个马达启动模块200,即将保护单元140、计算机总线段204、每个输入输出模块206和每个外部连接模块208附接到马达启动模块的结构202;
[0764]
c)通过将计算机总线204的各段彼此插入并将马达启动模块的计算机总线段插入计算机总线连接器650,将每个马达启动模块附接到基本框架164;
[0765]
d)将输入输出跳线附接到每个自由线性连接器610,并将公端或母端跳线连接到计算机总线142的自由端;和
[0766]
e)在每个马达启动模块中安装抽屉138。
[0767]
实际上,步骤a)至e)的顺序可以不同。特别地,步骤b)、c)和d)可以颠倒,并且步骤a)可以在任何其他时间进行。然而,步骤e)总是在步骤a)至c)之后。
[0768]
特别地,作为变型,马达启动模块的结构202首先附接到马达启动柱的基本框架164,然后执行组装马达启动模块200的步骤b)。
[0769]
允许电气柜100调试的连接阶段在组装阶段之后执行,并且包括以下步骤:
[0770]
a)将计算机总线连接器650的前连接器650连接到通信模块134;
[0771]
b)将每个马达启动模块200的每个输入输出模块206的连接端子块510连接到电气负载104,以便将电气负载的传感器连接到输入输出模块,并向电气负载提供第二辅助电压;和
[0772]
c)用电缆139将外部连接模块208连接到电气负载104,以便向电气负载104提供主电源。
[0773]
实际上,主电源与电气负载104的连接仅需要电缆139的连接。
[0774]
因此,这里描述的电气柜100,更具体地说是马达启动柱110是有利的,因为:
[0775]-电气柜100的调试所需的所有连接都在连接区域158中进行。这是有利的,因为它简化了电气柜的连接。特别地,在功能区域156中不需要连接。
[0776]-柜内部的大量连接是通过开槽或插入连接器实现的,这比设置电气连接电缆更简单。
[0777]-连接在电气柜中的电缆都来自连接区域158。因此,它们的管理更简单:当电气柜100包括布线区域160时,如图3所示,所有这些电缆可以在该布线区域中的电缆束中集合在一起,并且当电气柜100不包括布线区域160时,如图5所示,所有这些电缆可以在电缆束中集合在一起,该电缆束经由柜100的背面f2从柜100引出。
[0778]
上述马达启动模块200中的元件的取向涉及到设置在连接柱中的马达启动模块,该连接柱位于图1至5中的配电柱的右侧。
[0779]
实际上,在图1至图5中,上述马达启动模块200也可以布置在位于配电柱左侧的连接柱中。为此,马达启动模块200简单地绕平行于横向y轴的轴旋转180度。
[0780]
因此,马达启动模块200没有偏好的取向:保护单元140、计算机总线段204、每个抽屉138、每个输入输出模块206和每个外部连接模块208被配置为不管它们的空间方向而操作。
[0781]
例如,位于配电柱左侧的连接柱的抽屉138将被布置成使得其基部328布置在顶部,其盖布置在底部。由于抽屉138中包含的所有元件都附接到基部328,这种布置不会影响抽屉的操作。这种布置也不影响气流fl1对抽屉的冷却,因为气流fl1是水平的,因此不受方向变化的影响。这种布置在图1中可见。
[0782]
马达启动模块200的这种操作不管该模块的方位如何都是有利的,原因有很多:
[0783]-可以对位于配电柱左侧或右侧的连接柱使用相同的部件,这是经济的并且有利于柜100的设计;和
[0784]-可以在电分配柱108的每一侧上具有两个连接柱,从而形成功能柱111,这使得可以在两个连接柱之间共享配电柱,这是经济的并且使得可以减小柜100的尺寸。
[0785]
类似地,通信模块134没有偏好的取向,并且相对于本公开中描述的方向,安装在位于配电柱左侧的连接柱中的模块将围绕平行于横向y轴的轴旋转180度,与连接到其上的计算机总线连接器650的方式相同。
[0786]
因此,图1至5的左侧和右侧连接柱的内部布置相对于图2中可见的平面p2对称。
[0787]
此外,抽屉138的控制电路板364被配置成检测抽屉138的取向,例如使用集成到板中的传感器,并控制显示器302,使得显示在其上的信息被定向成从柜100的外部容易读取。显示器302因此被配置成使显示在其上的信息的取向适应抽屉138的取向。
[0788]
作为本发明的变型(未示出),电气柜100不包括任何马达启动模块,并且保护单元、计算机总线段、监测和控制抽屉、输入输出模块和外部连接模块直接布置在电气柜100中,附接到基本框架164。
[0789]
在图41和42中,高度等于1u的抽屉138被显示为没有盖330。该抽屉类似于图15至17所示的抽屉,但是另外包括位置检测模块900,该模块在图43中单独示出。
[0790]
在下文中,图41和42的抽屉138中与图15至17所示的抽屉138相似的那些元件具有相同的附图标记并以相同的方式操作。在下文中,主要描述图15至17的抽屉与图41和42的抽屉之间的区别。此外,如果在抽屉138的以下描述中提到了一个部件,而没有在图41和42中示出,则该部件对应于图1至40中所示的相同元件。
[0791]
在图41和42中,抽屉138的功能元件362和控制电路板364未示出。
[0792]
位置检测模块900附接到抽屉138的基部328。在该示例中,位置检测模块900附接到两个侧向结构346中的一个,优选地附接到不包括机械锁820的侧向结构。作为变型,位置检测模块900附接到与机械锁820相同的侧向结构。
[0793]
位置检测模块900包括用于检测抽屉138何时处于测试位置以及抽屉何时处于操作位置的检测器。在这个例子中,位置检测模块包括两个检测器902和904。两个检测器902和904连接到控制电路板364,以便将关于抽屉138的位置的信息传输到控制电路板。
[0794]
位置检测模块900还包括致动器906,用于致动检测器902和904。在这个例子中,致动器906是控制杆。控制杆906包括第一端908和第二端910。
[0795]
第一端908附接到侧向结构346的移动触头352,位置检测模块900附接到该移动触头352。更准确地说,第一端附接到移动触头352的框架422上。因此,第一端908被固定到框架422,使得框架422沿着y轴的平移导致控制杆906沿着y轴的平移,即沿着抽屉的纵向轴线a138的平移。换句话说,控制杆906可相对于侧向结构346沿着抽屉的纵向轴线a138平移。
[0796]
控制杆906相对于侧向结构346的平移有利地由位置检测模块900的固定结构912引导,该固定结构912特别包括在第二端910的水平处的导向件914。
[0797]
固定结构912例如通过螺纹连接附接到侧向结构346。此外,在该示例中,固定结构912包括例如通过铆接彼此连结的两个部分。在图43中,固定结构的各个部分用相同的附图标记912表示。
[0798]
有利地,位置检测模块900包括弹性返回构件916。弹性返回构件916将固定结构912连接到控制杆906,使得在没有其他力施加到控制杆的情况下,控制杆返回到对应于图43所示位置的位置。换句话说,控制杆906具有如图43所示的静止位置或稳定位置,并且弹性返回构件916倾向于将控制杆返回到该稳定位置。
[0799]
这里,控制杆906包括止动件917,当控制杆处于静止位置时,该止动件917抵靠固定结构912,并且防止控制杆移动超过其静止位置。这里,止动件917由相对于控制杆的主要部分成直角折叠的两个舌状物形成。
[0800]
在该示例中,弹性返回构件916是拉伸弹簧,其第一端附接到固定结构912的钩918,其第二端附接到控制杆的第二端910。
[0801]
实际上,当抽屉138处于其断开位置和其接合位置之间时,控制杆906处于静止位置,并且当抽屉处于其接合位置和其操作位置之间时,控制杆相对于侧向结构346沿着轴线a138移动,对于框架422也是如此。
[0802]
在该示例中,位置检测模块900被定向成使得控制杆906的第二端910靠近抽屉138的前部300定位,并且使得第一端908远离抽屉的前部。在控制杆906的移动过程中,第二端910远离检测器902和904移动,并且更靠近前部300,直到其位于前部,延伸穿过固定结构912中的窗口919。实际上,在前部300中提供了空的空间来容纳第二端910的存在。
[0803]
控制杆906包括两个顶部凸轮920和922以及一个底部凸轮924。两个顶部凸轮920和922位于平行于轴线a138的同一个平面中,即它们沿着z轴对齐,并且沿着z轴偏离底部凸轮924。顶部凸轮920和922设置为致动检测器902,底部凸轮924设置为致动检测器904。
[0804]
l920表示顶部凸轮920和检测器902的致动元件926之间的长度,l922表示顶部凸轮922和致动元件926之间的长度,l924表示底部凸轮924和检测器904的致动元件928之间的长度,长度l920、l922和l924沿着轴a138测量。有利的是,长度l922等于长度l924。
[0805]
当控制杆906处于静止位置时,即当抽屉138处于其断开位置和其接合位置之间时,长度l920、l922和l924具有它们各自的最大值。
[0806]
当抽屉138处于测试位置时,长度l920为零。因此,当抽屉处于测试位置时,顶部凸轮920与用于检测器902的致动元件926接触,这致动检测器902并导致检测信号从检测器902发送到控制电路板364,从而通知控制电路板抽屉处于测试位置。换句话说,当控制电路板364从由顶部凸轮920致动的检测器902接收到信号时,控制电路板364检测到抽屉138处于测试位置。
[0807]
当抽屉138处于操作位置时,长度l922和l924为零。因此,当抽屉处于操作位置时,顶部凸轮922与用于检测器902的致动元件926接触,底部凸轮924与用于检测器904的致动元件928接触,这同时致动检测器902和904,并导致两个检测信号从检测器902和904发送到控制电路板364,从而通知控制电路板抽屉处于操作位置。换句话说,当控制电路板364同时接收到来自由顶部凸轮922和底部凸轮924致动的检测器902和检测器904的信号时,控制电路板364检测到抽屉138处于测试位置。
[0808]
当抽屉138处于测试位置和操作位置之间的中间位置时,顶部凸轮和底部凸轮不与用于检测器的致动元件接触,并且没有检测信号被发送到控制电路板364。
[0809]
在该示例中,检测器902和904是干式接触开关,并且致动元件926和928是安装成绕平行于z轴的相应轴z926和z928枢转的金属条。
[0810]
检测器902通过两根导线930连接到控制电路板364,这在图41至43中以简化的方式示出。两根导线930形成一个回路,该环在控制电路板的水平开始和结束,并且以这样一种方式穿过检测器902,使得检测器的金属条926可以打开或关闭该回路。实际上,当金属带926与顶部凸轮920或顶部凸轮922接触时,由两根金属导线930形成的回路是闭合的,因为顶部凸轮然后推动金属条926并使其绕轴线z926枢转,并且当金属条不与顶部凸轮接触时,回路是断开的。当由导线930形成的回路闭合时,控制电路板364接收来自检测器902的检测信号。
[0811]
同样,检测器904通过两根导线932连接到控制电路板364,如图41至43中以简化的方式所示,它们形成一个回路,当金属条928与底部凸轮924接触时该回路闭合,当金属条不
与底部凸轮接触时该回路断开。当由导线932形成的回路闭合时,控制电路板364接收来自检测器904的检测信号。
[0812]
在该示例中,控制电路板364被配置为当接收到来自检测器902的检测信号时检测到抽屉138处于测试位置,并且当同时接收到来自检测器902和904的检测信号时检测到抽屉138处于操作位置。
[0813]
位置检测模块900特别有利,因为它允许抽屉138的操作更加可靠。具体地,借助于由位置检测模块900提供的抽屉138的位置检测,控制电路板364对功能元件362的控制考虑了抽屉的实际位置。由此改善了对功能元件362的控制。
[0814]
此外,位置检测模块900的操作特别可靠,因为位置检测模块完全集成到抽屉138中,并且因为抽屉的位置仅基于移动侧向触头352之一的位置通过检测该侧向触头相对于抽屉的基部328的位置来检测。换句话说,抽屉位置的检测不需要与马达启动模块200或电气柜100的固定结构的任何相互作用,并且位置检测模块900被隔离在抽屉138中。这是特别有利的,因为抽屉138的位置的检测对抽屉138相对于电气柜100在其测试和操作位置周围的位置的潜在破坏不敏感,否则这可能破坏检测器902和904。这种破坏例如是由抽屉受到的振动或冲击引起的。
[0815]
作为变型,当控制电路板364仅接收来自检测器904的检测信号时,检测操作位置。在这种变型中,控制杆906不包括第二顶部凸轮922,因为不需要在操作位置致动检测器902。
[0816]
作为变型,检测器902和904的取向不同于图41至43所示的取向,并且顶部凸轮920和922以及底部凸轮924的位置被相应地调整。
[0817]
作为变型,位置检测模块900不包括弹性返回构件916。在这种变型中,控制杆906通过拉伸弹簧446返回到其静止位置,拉伸弹簧446倾向于将框架422并因此将控制杆带入静止位置。
[0818]
作为变型,检测器902和904是感应开关或霍尔效应开关,它们检测顶部凸轮920和922以及底部凸轮924的位置。
[0819]
作为变型,位置检测模块900包括用于检测测试和操作位置的单个检测器902或904。
[0820]
作为变型,抽屉138包括移动触头352,其仅可沿着抽屉的纵轴a138移动。在这种变型中,通信接口353例如从输入输出模块206和保护单元140突出,以便当抽屉138处于测试位置时与移动触头352接触,并且当抽屉从其测试位置移动到其操作位置时驱动移动触头相对于基部328的移动。在这种变型中,位置检测模块900的操作不变。
[0821]
上面设想的实施例和变型可以组合起来以产生本发明的新实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1