一种可再生能源直流制氢孤岛系统的功率管理与分解方法
1.本发明属于能源利用技术领域,具体涉及一种可再生能源直流制氢孤岛系统的功率管理与分解方法。
背景技术:
2.能源危机和环境污染是制约世界各国经济快速发展的重要因素。优化能源配置,推进能源转型,提升可再生能源发电比例,是实现“碳达峰”和“碳中和”伟大目标的重要举措。近年来,全国新能源并网装机容量不断提升,部分新能源富集地区弃风、弃光率较高,造成了大量的能源浪费,如何高效、经济的消纳大规模可再生能源是未来新型电力系统的关键技术挑战。
3.由于风、光可再生能源输出功率具有不确定性、间歇性和宽功率范围波动特征,导致源-荷功率匹配困难,因此需要配置储能单元来吸收或补偿可再生能源与负荷之间的不平衡功率。氢作为一种功率载体,具有功率密度高、容量大、寿命长、便于储存和传输等特点,将过剩的可再生能源用于制氢是一种提升可再生能源利用率的有效方案。氢能通常作为一种长期储能单元,其时间响应尺度为分钟或秒级,对于要求动态调节速度较高、短时频繁启停的微电网难以适用,因此可以将氢储能与蓄电池构成电-氢混合储能,利用蓄电池来补偿暂态不平衡功率,而氢储能用于补偿长期、稳态不平衡功率。
4.由于制氢单元、锂电池储能、光伏发电单元以及风电单元以直流汇入能够减小功率转换次数,提升系统效率,因此采用直流集成方案是一种更加高效、经济的组网方案。可再生能源直流制氢孤岛系统的典型结构如图1所示。根据图1,孤岛系统中包括风、光可再生能源发电单元,蓄电池储能单元、制氢单元以及负载单元,各单元共同汇入直流母线。在可再生能源直流制氢孤岛系统中,蓄电池储能单元通常作为平衡节点来维持直流母线电压稳定。然而为了降低投资成本,系统中锂电池容量配置有限。此外,由于制氢单元和可再生能源动态响应难以匹配,会导致容量较小的锂电池储能单元难以稳定直流电压,甚至导致系统崩溃,因此如何利用容量较小的电储能单元平衡动态特性不匹配引起的功率差额,保证可再生能源制氢孤岛系统稳定运行仍存在一些技术问题。
技术实现要素:
5.为了解决上述技术问题,本发明考虑了制氢单元动态响应特性,并提供一种可再生能源直流制氢孤岛系统的功率管理与分解方法,具体包括如下步骤:
6.步骤一,建立电解槽的静动态模型,确定电解槽的静态和动态响应特性,获取电解槽的动态响应解析方程;
7.步骤二,确定可再生能源直流制氢孤岛系统的功率管理方法;
8.步骤三,计及电解槽动态响应特性,提出可再生能源与制氢单元功率指令分解方法;
9.步骤四,确定不同运行模式下风力发电单元、光伏发电单元、制氢单元以及蓄电池
储能单元的控制方法;
10.步骤五,确定可再生能源直流制氢孤岛系统的控制架构。
11.进一步地,所述步骤一的获取电解槽动态响应解析方程包括如下步骤:
12.1)建立电解槽的输出电压-电流模型;
13.2)建立电解槽的热模型;
14.3)建立电解槽的产氢模型;
15.4)建立制氢单元的压缩机模型;
16.5)建立储氢罐模型;
17.6)通过仿真软件搭建完整的制氢单元仿真模型,包括制氢单元本体模型以及控制系统模型;
18.7)在制氢单元仿真模型的基础上进行电流或功率阶跃响应测试,并通过仿真数据拟合得到电解槽输出功率p
ae
(t)的动态响应方程:
19.p
ae
(t)=a3t3+a2t2+a1t+a020.式中:t为时间;a0,a1,a2和a3为动态特性拟合系数。
21.进一步地,所述步骤二具体包括:
22.定义s
soc
为蓄电池的荷电状态,s
bh
为蓄电池soc上限,s
bl
为蓄电池soc下限;p
ae,min
为电解槽允许运行下限;p
ae,max
为电解槽允许运行上限;p
wt,t
为风电功率预测值;p
pv,t
为光伏功率预测值;则所述可再生能源直流制氢孤岛系统包括如下工作模式:
23.模式1:s
bh
》s
soc
》s
bl
且p
wt,t
+p
pv,t
≤p
ae,min
,风力发电单元与光伏发电单元均工作在最大功率跟踪模式,制氢单元工作在最小功率运行点,储能放电并稳定直流电压;
24.模式2:s
bh
》s
soc
》s
bl
且p
wt,t
+p
pv,t
》p
ae,min
,风力发电单元与光伏发电单元均工作在功率调度模式,稳态时制氢单元功率约等于风力发电、光伏发电输出功率总和,蓄电池储能单元充放电并稳定电压,同时补偿由风光预测偏差所引起的不平衡功率;
25.模式3:s
soc
≤s
bl
且p
wt,t
+p
pv,t
≤p
ae,min
,风力发电单元与光伏发电单元均工作在最大功率跟踪模式,制氢单元待机,储能充电并稳定直流电压;
26.模式4:s
soc
≤s
bl
且p
wt,t
+p
pv,t
》p
ae,min
,风力发电单元与光伏发电单元均工作在功率调度模式,制氢单元功率等于功率分配系数β倍的风力发电、光伏发电输出功率总和,其中功率分配系数β《1,储能充电并稳定直流电压;
27.模式5:s
soc
≥s
bh
且p
wt,t
+p
pv,t
≤p
ae,min
,风力发电单元与光伏发电单元均工作在最大功率跟踪模式,制氢单元工作在最小功率运行点,储能放电并稳定直流电压;
28.模式6:s
soc
≥s
bh
且p
wt,t
+p
pv,t
》p
ae,min
,此时风力发电单元与光伏发电单元均工作在功率调度模式,制氢单元功率等于功率分配系数β倍的风力发电、光伏发电输出功率总和,其中功率分配系数β》1,储能放电并稳定直流电压。
29.进一步地,所述步骤三具体包括如下步骤:
30.根据电解槽动态响应方程以及控制周期对功率指令分解下发,避免蓄电池储能系统所补偿的暂态功率越限;所述功率指令分解的方法包括:
31.(1)根据风光预测模块的输出计算风光功率预测值总和p
pw,t
;
32.(2)计算风力发电单元与光伏发电单元功率所占比例k
pv
,k
wt
;
33.(3)根据动态响应方程计算单位控制周期下的制氢单元可调整功率p
ae,a
:
34.当p
ae,a
《p
b,rate
时,每个控制周期可调度功率等于p
ae,a
;
35.当p
ae,a
≥p
b,rate
时,需要多个控制周期调节以达到期望值;其中,每个控制周期可调度功率为蓄电池储能系统额定功率p
b,rate
;
36.所述制氢单元的可调度功率为:
37.p
ae,t
=p
pw,t
(t+1)-p
ae
(t)
38.n=sgn(p
ae,t
)
39.式中:p
ae,t
为制氢单元的可调度功率;p
ae
(t)为当前时刻功率;p
pw,t
(t+1)为下一时刻风光功率预测值总和;sgn()为符号函数;
40.当n》0时,表明下个控制周期中制氢功率增加;当n《0时,表明下个控制周期中制氢功率减小;当n=0时,表明当前制氢功率等于风光预测功率之和;
41.当p
ae,t
》p
ae,a
时,制氢功率参考值为:
42.p
ae,ref
=p
ae
+np
ae,a
43.当p
ae,t
《p
ae,a
时,制氢功率参考值为:
44.p
ae,ref
=p
ae
+np
ae,t
45.在功率管理方法中,当风力发电单元和光伏发电单元处于功率调度模式时,稳态条件下的储能功率接近为零,因此风力发电单元和光伏发电系统按照功率比例分担功率,风力发电单元和光伏单元功率参考值如下:
46.p
wt,ref
=p
wt
+k
wt
np
ae,ref
47.p
pv,ref
=p
pv
+k
pv
np
ae,ref
48.式中:p
wt
为风力发电单元功率,p
pv
光伏发电单元功率。
49.同时风力发电单元和光伏发电单元的功率参考值应满足如下约束条件:
50.p
wt,min
≤p
wt,ref
≤p
wt,rate
51.p
pv,min
≤p
pv,ref
≤p
pv,rate
52.式中:p
wt,min
和p
wt,rate
分别为风力发电单元允许的最小和额定运行功率;p
pv,min
和p
pv,rate
分别为光伏发电单元允许的最小和额定运行功率。
53.通过调整功率分配系数β来调整制氢单元功率,所述制氢单元功率参考值为:
54.p
ae,ref
=p
ae
+βnp
ae,t
[0055][0056]
进一步地,所述步骤四包括:
[0057]
1)风力发电系统共存在三种控制方法,包括待机模式、最大功率跟踪模式和功率调度模式;
[0058]
2)光伏发电系统共存在三种控制方法,包括待机模式、最大功率跟踪模式和功率调度模式;
[0059]
3)蓄电池储能系统作为主控单元,其控制方法包括恒压控制与待机模式;
[0060]
4)制氢单元为灵活可控负荷,其控制方法包括恒功率控制和待机模式。
[0061]
进一步地,所述步骤五包括如下步骤:
[0062]
1)采用双层控制架构,其中,上层为功率管理层,下层为本地设备控制层;
[0063]
2)上层的功率管理层包括功率管理方法以及计及制氢动态特性的功率指令分解方法;上层的功率管理系统需要通过通信方式采集本地设备层中的电气参数;
[0064]
3)在本地设备控制层中,各设备具备多种控制模式,并接收上层功率管理系统下发的控制模式转换指令和功率指令。
[0065]
进一步地,所述电气参数包括风力发电单元功率p
wt
、光伏发电单元功率p
pv
、制氢单元所需功率p
ae
、直流母线电压u
dc
、蓄电池荷电状态s
soc
。
[0066]
有益效果:
[0067]
本发明提出了一种可再生能源直流制氢孤岛系统的功率管理方法,并设计了计及制氢单元动态响应特性的功率指令分解方法,能够在储能容量配置受限的情况下确保系统稳定,并通过分配系数灵活调整制氢单元功率,避免了蓄电池储能单元与可再生能源发电单元的控制模式切换,降低了风光储氢系统协调控制的复杂性。
[0068]
此外,由于燃油汽车是二氧化碳排放的主要贡献者,为了实现清洁、低碳、绿色轨道交通,氢燃料电池汽车得到了快速发展。为了满足氢燃料电池汽车的加氢需求,需要快速布局加氢站。由于铺设管道传输氢气成本很高,因此将可再生能源发电,制氢站与加氢站深度融合,形成产-供一体化商业模式,减少远距离输氢环节。为了确保系统稳定运行,本发明提出一种计及制氢单元动态特性的功率管理和功率指令分解方法,填补相关技术空白,应用前景广阔。
附图说明
[0069]
图1为可再生能源直流制氢孤岛系统的典型结构示意图;
[0070]
图2为本发明的电解槽动态响应解析方程获取流程示意图;
[0071]
图3为本发明的功率管理流程图;
[0072]
图4为本发明的可再生能源和制氢单元功率指令分解方法流程图;
[0073]
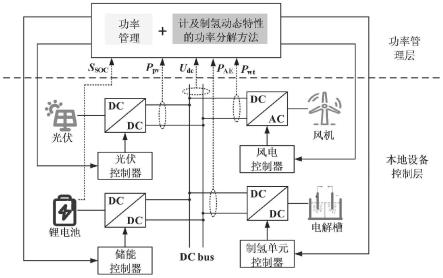
图5为本发明的系统整体控制框图。
具体实施方式
[0074]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0075]
如图1所示的可再生能源直流制氢孤岛系统的典型结构,所述孤岛系统中包括风力发电单元、光伏发电单元,蓄电池储能单元、制氢单元以及负载单元,各单元共同汇入直流母线。在所述可再生能源直流制氢孤岛系统中,所述蓄电池储能单元通常作为平衡节点来维持直流母线电压稳定。所述蓄电池储能单元为锂电池储能单元。
[0076]
本发明的可再生能源直流制氢孤岛系统的功率管理与分解方法包括以下步骤:
[0077]
步骤一,建立电解槽的静动态模型,确定电解槽的静态和动态响应特性,获取电解槽的动态响应解析方程。
[0078]
步骤二,确定可再生能源直流制氢孤岛系统的功率管理方法。
[0079]
步骤三,计及电解槽动态响应特性,提出可再生能源与制氢单元功率指令分解方
法。
[0080]
步骤四,确定不同运行模式下风力发电单元、光伏发电单元、制氢单元以及蓄电池储能单元的控制方法。
[0081]
步骤五,确定可再生能源直流制氢孤岛系统的控制架构。
[0082]
具体地,所述步骤一包括如下步骤:
[0083]
(1)获取电解槽的动态响应解析方程,其流程示意图如图2所示,具体步骤如下:
[0084]
1)建立电解槽的输出电压-电流模型;
[0085]
2)建立电解槽的热模型;
[0086]
3)建立电解槽的产氢模型;
[0087]
4)建立制氢单元的压缩机模型;
[0088]
5)建立储氢罐模型;
[0089]
6)通过仿真软件搭建完整的制氢单元仿真模型,主要包括制氢单元本体模型以及控制系统模型。为了更好的模拟制氢单元动态响应特性,控制系统包括电流/功率控制单元、压力控制单元、温度控制单元、液位控制单元等;
[0090]
7)在制氢单元仿真模型的基础上进行电流或功率阶跃响应测试,并通过仿真数据拟合得到电解槽输出功率p
ae
(t)的动态响应方程:
[0091]
p
ae
(t)=a3t3+a2t2+a1t+a0ꢀꢀꢀ
(1)
[0092]
式中:t为时间;a0,a1,a2和a3为动态特性拟合系数。
[0093]
所述步骤二具体包括如下步骤:
[0094]
蓄电池的荷电状态(state of charge,soc)为:
[0095][0096]
式中:q为锂电池容量;ib为锂电池电流;t为时间。
[0097]
定义s
bh
为蓄电池soc上限,s
bl
为蓄电池soc下限;p
ae,min
为电解槽允许运行下限;p
ae,max
为电解槽允许运行上限;p
wt,t
为风电功率预测值;p
pv,t
为光伏功率预测值。可再生能源直流制氢孤岛系统的工作模式与功率管理流程图如图3所示,其包括如下模式。
[0098]
模式1:s
bh
》s
soc
》s
bl
且p
wt,t
+p
pv,t
≤p
ae,min
,风力发电单元与光伏发电单元均工作在最大功率跟踪模式,制氢单元工作在最小功率运行点,储能放电并稳定直流电压。
[0099]
模式2:s
bh
》s
soc
》s
bl
且p
wt,t
+p
pv,t
》p
ae,min
,风力发电单元与光伏发电单元均工作在功率调度模式,稳态时制氢单元功率约等于风力发电、光伏发电输出功率总和,蓄电池储能单元充放电并稳定电压,同时补偿由风光预测偏差所引起的不平衡功率。
[0100]
模式3:s
soc
≤s
bl
且p
wt,t
+p
pv,t
≤p
ae,min
,风力发电单元与光伏发电单元均工作在最大功率跟踪模式,制氢单元待机,储能充电并稳定直流电压。
[0101]
模式4:s
soc
≤s
bl
且p
wt,t
+p
pv,t
》p
ae,min
,风力发电单元与光伏发电单元均工作在功率调度模式,制氢单元功率等于功率分配系数β倍的风力发电、光伏发电输出功率总和,其中功率分配系数β《1,储能充电并稳定直流电压。
[0102]
模式5:s
soc
≥s
bh
且p
wt,t
+p
pv,t
≤p
ae,min
,风力发电单元与光伏发电单元均工作在最大功率跟踪模式,制氢单元工作在最小功率运行点,储能放电并稳定直流电压。
[0103]
模式6:s
soc
≥s
bh
且p
wt,t
+p
pv,t
》p
ae,min
,此时风力发电单元与光伏发电单元均工作在
功率调度模式,制氢单元功率等于功率分配系数β倍的风力发电、光伏发电输出功率总和,其中功率分配系数β》1,储能放电并稳定直流电压。
[0104]
所述步骤三具体包括如下步骤:
[0105]
在可再生能源直流制氢孤岛系统中,由于蓄电池配置容量有限,且可再生能源与制氢单元动态响应不匹配,因此应根据电解槽动态响应方程以及控制周期对功率指令进行分解下发,避免蓄电池储能系统所补偿的暂态功率越限。所提出的功率指令分解方法流程如图4所示。
[0106]
根据图4,首先根据风光预测模块的输出计算风光功率预测值总和为:
[0107]
p
pw,t
=p
pv,t
+p
wt,t
ꢀꢀꢀ
(3)
[0108]
根据(3)计算得到风力发电单元与光伏发电单元功率所占比例为:
[0109][0110][0111]
式中:k
pv
为光伏发电单元功率所占比例系数;k
wt
为风力发电单元功率所占比例系数。
[0112]
根据动态响应方程计算单位控制周期下的制氢单元可调整功率为:
[0113]
p
ae,a
=a3t
c3
+a2t
c2
+a1tc+a0ꢀꢀꢀ
(6)
[0114]
式中:tc为控制周期。
[0115]
为了确保系统稳定,每个控制周期下的可允许调整功率应小于蓄电池储能系统额定功率。
[0116]
当p
ae,a
《p
b,rate
时,每个控制周期可调度功率等于p
ae,a
。
[0117]
当p
ae,a
≥p
b,rate
时,需要多个控制周期调节才能达到期望值。每个控制周期可调度功率等于p
b,rate
,所需要的控制周期数如下:
[0118][0119]
式中:m为所需控制周期数;p
b,rate
为蓄电池储能系统额定功率。
[0120]
制氢单元的可调度功率为:
[0121]
p
ae,t
=p
pw,t
(t+1)-p
ae
(t)
ꢀꢀꢀ
(8)
[0122]
n=sgn(p
ae,t
)
ꢀꢀꢀ
(9)
[0123]
式中:p
ae,t
为制氢单元的可调度功率;p
ae
(t)为当前时刻功率;p
pw,t
(t+1)为下一时刻风光功率预测值总和;sgn()为符号函数;
[0124]
当n》0时,表明下个控制周期中制氢功率增加;当n《0时,表明下个控制周期中制氢功率减小;当n=0时,表明当前制氢功率等于风光预测功率之和。
[0125]
当p
ae,t
》p
ae,a
时,制氢功率参考值为:
[0126]
p
ae,ref
=p
ae
+np
ae,a
ꢀꢀꢀ
(10)
[0127]
当p
ae,t
《p
ae,a
时,制氢功率参考值为:
[0128]
p
ae,ref
=p
ae
+np
ae,t
ꢀꢀꢀ
(11)
[0129]
在功率管理方法中,当风力发电单元和光伏发电单元处于功率调度模式时,稳态条件下的储能功率接近为零,因此风力发电单元和光伏发电系统按照功率比例分担功率,风力发电单元和光伏单元功率参考值如下:
[0130]
p
wt,ref
=p
wt
+k
wt
np
ae,ref
ꢀꢀꢀ
(12)
[0131]
p
pv,ref
=p
pv
+k
pv
np
ae,ref
ꢀꢀꢀ
(13)
[0132]
式中:p
wt
为风力发电单元功率,p
pv
为光伏发电单元功率。
[0133]
同时风力发电单元和光伏发电单元的功率参考值应满足如下约束条件:
[0134]
p
wt,min
≤p
wt,ref
≤p
wt,rate
ꢀꢀꢀ
(14)
[0135]
p
pv,min
≤p
pv,ref
≤p
pv,rate
ꢀꢀꢀ
(15)
[0136]
式中:p
wt,min
和p
wt,rate
分别为风力发电单元允许的最小和额定运行功率;p
pv,min
和p
pv,rate
分别为光伏发电单元允许的最小和额定运行功率。
[0137]
当蓄电池s
soc
达到下限时,为了避免蓄电池长时间处于深度放电区域,因此通过调整功率分配系数β减小制氢单元功率,使得风光输出功率大于制氢功率,而余下功率会自主为蓄电池充电。同理,当蓄电池s
soc
达到上限时,为了避免蓄电池长时间处于深度放电区域,因此通过调整功率分配系数β增加制氢单元功率,使得风光输出功率小于制氢功率,而蓄电池自主放电补偿不平衡功率。此时制氢单元功率参考值为:
[0138]
p
ae,ref
=p
ae
+βnp
ae,t
ꢀꢀꢀ
(16)
[0139][0140]
步骤四,确定不同运行模式下风力发电单元、光伏发电单元、制氢单元以及蓄电池储能单元的控制方法。
[0141]
1)风电机组控制方法:根据上述分析可知,风力发电系统共存在三种工作方式,包括:待机模式、最大功率跟踪模式和功率调度模式;
[0142]
2)光伏发电系统控制方法:共存在三种工作方式,包括待机模式、最大功率跟踪模式和功率调度模式;
[0143]
3)蓄电池储能系统控制方法:蓄电池储能系统作为主控单元,其控制方式包括:恒压控制与待机模式;
[0144]
4)制氢单元控制方法:制氢单元为灵活可控负荷,其控制方式包括:恒功率控制和待机模式。
[0145]
所述步骤五中,如图5所示,确定可再生能源直流制氢孤岛系统的控制架构包括如下步骤:
[0146]
1)在此采用双层控制架构,其中,上层为功率管理层,下层为本地设备控制层;
[0147]
2)上层的功率管理层包括功率管理方法以及计及制氢动态特性的功率指令分解方法。为了执行功率管理方法,上层的功率管理系统需要通过通信方式采集本地设备层中的电气参数,包括风力发电单元功率p
wt
、光伏发电单元功率p
pv
、制氢单元所需功率p
ae
、直流
母线电压u
dc
、蓄电池荷电状态s
soc
;
[0148]
3)在本地设备控制层中,各设备具备多种控制模式,并接收上层的功率管理系统下发的控制模式转换指令和功率指令。
[0149]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1