一种光伏组件纠偏型智能清扫机器人及其控制方法与流程
1.本发明涉及太阳能光伏板设备领域,特别涉及一种光伏组件纠偏型智能清扫机器人及其控制方法。
背景技术:
2.光伏发电是一种可持续再生的清洁能源,现已广泛运用,成为最具开发和利用潜力的清洁能源之一。如果灰尘或积雪附着在太阳能光伏板表面,就会影响光线的透射率,降低发电的效率;同时灰尘还会在太阳能光伏板局部形成热斑效应也会降低其的发电效率,甚至烧毁太阳能光伏板。如果灰尘或积雪不及时清除,将会造成光伏电池发电量的损失,影响组件的寿命,降低发电效率,导致能源浪费。因此,保持太阳能光伏板清洁是保证光伏电站发电能力的有效途径。
3.光伏板清扫机器人在一长串的光伏板阵列上行进,在行进过程中因光伏板阵列安装的直线度、清扫机器人各行走轮与光伏板表面的摩擦力变化等会导致清扫机器人行进时出现偏摆,因此需要实时纠偏。专利cn 109365462 b利用测距传感器测量机器人与光伏板侧壁的相对距离来判断偏差,光伏板阵列并非直线而是波浪起伏型的曲线,因此其测量相对距离的方法会有数据不准确的情况。专利cn 112756307 a利用位置传感器检测机器人导轮与光伏板边框的距离来计算出其偏斜角度,因光伏板阵列安装时各相邻光伏板的位置会有错落,导致其测量的数值出现偏差。
技术实现要素:
4.本发明的目的是针对背景技术中存在的缺点和问题加以改进和创新,提供一种通过位置传感器反馈给控制组件的偏移量信息从而实现对右驱动组件转速进行实时调节,避免机器人运行时走偏、打滑和卡死,提高清扫效率的一种光伏组件纠偏型智能清扫机器人及其控制方法。
5.一种光伏组件纠偏型智能清扫机器人,覆盖在n块光伏板上工作,包括框架组件、控制组件、设置在框架组件上的导向轮组件、清扫组件、电源组件、测量组件、左驱动组件和右驱动组件,所述左驱动组件和右驱动组件平行分布。
6.所述框架组件包括上部模块、中部模块、下部模块、罩壳和连接杆件,中部模块位于上部模块与下部模块之间,上部模块和下部模块的数量各为1个,中部模块的数量为n-1个,上部模块、中部模块和下部模块通过罩壳连接形成一个长方形整体结构,罩壳内的左右两侧各设有一个连接杆件,二个连接杆件平行且对齐分布,且连接杆件的轴线平行于长方形整体结构的长边。
7.所述左驱动组件包括左驱动电机、左同步轮、左同步带、n+1个左滚轮和n个左传动轴,n个左传动轴依次连接,且n个左传动轴平行于连接杆件的轴线,左驱动电机设于上部模块上,左驱动电机通过左同步轮和左同步带与最上部的左传动轴连接,n+1个左滚轮均匀分布设置在n个左传动轴上,且仅有最上部的那个左滚轮与左传动轴固定设置,其他的左滚轮
与左传动轴活动设置。
8.所述右驱动组件包括右驱动电机、右同步轮、右同步带、n+1个右滚轮和n个右传动轴,n个右传动轴依次连接,且n个右传动轴平行于连接杆件的轴线,右驱动电机设于下部模块上,右驱动电机通过右同步轮和右同步带与最下部的右传动轴连接,n+1个右滚轮均匀分布设置在n个右传动轴上,且仅有最下部的那个右滚轮与右传动轴固定设置,其他的右滚轮与右传动轴活动设置。
9.所述导向轮组件包括导向驱动电机、导向同步轮、导向同步带、导向轴和一个导向滚轮,导向驱动电机设置在上部模块上,导向驱动电机通过导向滚轮、导向同步带与导向轴连接,导向轴上固定设置有导向滚轮,工作时导向滚轮紧贴光伏板边缘,且导向滚轮的线速度恒等于最上部的那个左滚轮的线速度。
10.所述清扫组件包括清扫电机、清扫同步轮、清扫同步带、n个清扫滚筒刷,清扫电机设置在下部模块上,n个清扫滚筒刷首尾依次相连,清扫电机通过清扫同步轮和清扫同步带与最下部的清扫滚筒刷的轴连接,清扫滚筒刷的轴线平行于连接杆件的轴线。
11.所述测量组件包括n组位置传感器,一组位置传感器对应一个左传动轴,n组位置传感器设置在罩壳内左侧的连接杆件上,位置传感器垂直于光伏板,且位置传感器沿连接杆件的轴线分布,用于实时探测光伏板的金属边框得到时间反馈。
12.所述光伏组件纠偏型智能清扫机器人的运行方向垂直于长方形整体结构的长边;所述电源组件包括蓄电池和车载太阳能板,车载太阳能板设置在罩壳上对应远离光伏板的一面,蓄电池设置在罩壳内,蓄电池与车载太阳能板相连,蓄电池分别与左驱动电机、右驱动电机、导向驱动电机、清扫电机和位置传感器相连。
13.控制组件分别与左驱动电机、右驱动电机、导向驱动电机、清扫电机和位置传感器相连。
14.在其中一个实施例中:n≥1。
15.在其中一个实施例中:n=2。
16.在其中一个实施例中:所述上部模块包括上部支架,左驱动电机设于上部支架上,导向驱动电机设置在上部支架上。
17.在其中一个实施例中:所述下部模块包括下部支架,右驱动电机设于下部支架上,清扫电机设置在下部支架上。
18.在其中一个实施例中:所述中间模块包括中间安装架,用于为左驱动组件、右驱动组件和清扫组件提供中间支撑。
19.在其中一个实施例中:每组位置传感器包括2个位置传感器,且2个位置传感器分别为第一传感器和第二传感器,第一传感器处于第二传感器的下部。
20.一种上述的光伏组件纠偏型智能清扫机器人的控制方法,包括以下步骤:1)手动或控制组件自动控制同时开启左驱动电机、右驱动电机、导向驱动电机、清扫电机和位置传感器,且开启时左驱动电机的运转速度与右驱动电机的运转速度一致,开启后光伏组件纠偏型智能清扫机器人在光伏板上运行和清扫。
21.2)控制组件根据第一位置传感器和第二位置传感器分别探测光伏板的金属边框并分别得到时间反馈t1和t2,并将t1和t2反馈给控制组件。
22.3)控制组件判断是否t1=t2,当t1=t2时,控制组件始终控制右驱动电机的运转速
度与左驱动电机的运转速度一致后进入步骤6);否则即t1≠t2时,进入步骤4)。
23.4)控制组件判断是否t1<t2,当t1<t2时,控制组件控制右驱动电机减速后返回步骤3);否则进入步骤5)。
24.5)t1>t2,控制组件控制右驱动电机加速后返回步骤3)。
25.6)控制组件判断清扫工作是否全部完成;当光伏组件纠偏型智能清扫机器人清扫完所有的光伏板后,进入步骤7);否则返回步骤3)。
26.7)手动或控制组件自动控制同时关闭左驱动电机、右驱动电机、导向驱动电机、清扫电机和位置传感器。
27.8)工作结束。
28.本发明的优点和有益效果:本发明为模块化构造,根据清扫光伏阵列的覆盖(横跨)n块光伏板宽度进行参数化设计和制造,简便快捷。同时控制组件利用测量组件反馈的偏移量信息对右驱动组件的运转进行实时调节,避免的机器人运行时走偏、打滑或卡死的情况,提高了整个光伏组件表面的清扫效率。控制组件还可以自动控制机器人的启停。
29.本发明的各个位置传感器垂直于光伏板表面,探测光伏板的金属边框。在清扫机器人行进时实时测量到达金属边框的时间,根据各个位置传感器的时间差来判断偏斜并纠偏;该设计对比现有技术测量偏差更精准更可靠。
30.本发明节能环保。
附图说明
31.图1是本发明在光伏板上运行时的状态示意图。
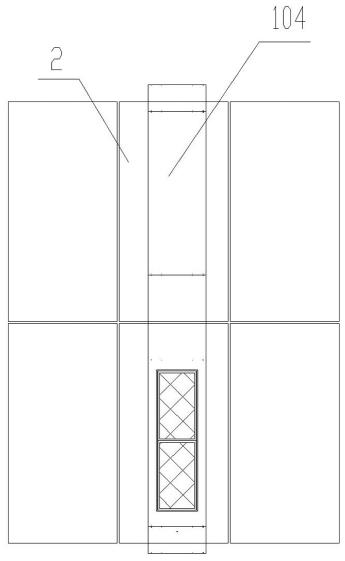
32.图2是本发明的主视图。
33.图3是本发明的后视图。
34.图4是本发明导向轮组件和清扫组件的侧视图。
35.图5是本发明左驱动组件的结构示意图。
36.图6是本发明右驱动组件的结构示意图。
37.图7是本发明清扫组件的结构示意图。
38.图8是本发明运行控制流程图。
具体实施方式
39.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的首选实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
40.需要说明的是,当元件被认为是“设置”在另一个元件上,它可以是直接设置或连接在另一个元件上或者可能同时存在居中元件。术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方
位、以特定的方位构造和操作。
41.除非另有定义,本文中所使用的所有的技术和科学术语与本发明的技术领域的技术人员通常理解的含义相同。说明书中所使用的术语只是为了描述具体的实施目的,不是旨在限制本发明。
42.实施例1请参阅图1至图8,一种光伏组件纠偏型智能清扫机器人,覆盖在2块光伏板2上工作,包括框架组件1、控制组件、设置在框架组件上的导向轮组件11、清扫组件12、电源组件13、测量组件14、左驱动组件15和右驱动组件16,所述左驱动组件15和右驱动组件16平行分布。
43.如图2和图3,所述框架组件包括上部模块101、中部模块102、下部模块103、罩壳104和连接杆件105。中部模块102位于上部模块101与下部模块103之间。上部模块101和下部模块103的数量各为1个,中部模块102的数量为1个,上部模块101、中部模块102和下部模块103通过罩壳104连接形成一个长方形整体结构。罩壳104内的左右两侧各设有一个连接杆件105,二个连接杆件105平行且对齐分布,且连接杆件105的轴线平行于长方形整体结构的长边。
44.如图3和图5,所述左驱动组件15包括左驱动电机151、左同步轮152、左同步带153、3个左滚轮154和2个左传动轴155。2个左传动轴155依次连接,且2个左传动轴155平行于连接杆件105的轴线。左驱动电机151设于上部模块101上。左驱动电机151通过左同步轮152和左同步带153与最上部的左传动轴155连接。3个左滚轮154均匀分布设置在2个左传动轴155上,且仅有最上部的那个左滚轮154与左传动轴155固定设置,其他的左滚轮154与左传动轴155活动设置。
45.如图3和图6,所述右驱动组件16包括右驱动电机161、右同步轮162、右同步带163、3个右滚轮164和2个右传动轴165。2个右传动轴165依次连接,且2个右传动轴165平行于连接杆件105的轴线。右驱动电机161设于下部模块103上。右驱动电机161通过右同步轮162和右同步带163与最下部的右传动轴165连接。3个右滚轮164均匀分布设置在2个右传动轴165上,且仅有最下部的那个右滚轮164与右传动轴165固定设置,其他的右滚轮164与右传动轴165活动设置。
46.如图3和图4,所述导向轮组件11包括导向驱动电机111、导向同步轮112、导向同步带113、导向轴114和一个导向滚轮115。导向驱动电机111设置在上部模块101上。导向驱动电机111通过导向滚轮115、导向同步带113与导向轴114连接。导向轴114上固定设置有导向滚轮115。工作时导向滚轮115紧贴光伏板2边缘,且导向滚轮115的线速度恒等于最上部的那个左滚轮154的线速度。
47.如图3、图4和图7,所述清扫组件12包括清扫电机121、清扫同步轮122、清扫同步带123、,2个清扫滚筒刷124。清扫电机121设置在下部模块103上。2个清扫滚筒刷124首尾依次相连。清扫电机121通过清扫同步轮122和清扫同步带123与最下部的清扫滚筒刷124的轴连接,清扫滚筒刷124的轴线平行于连接杆件105的轴线。
48.如图3,所述测量组件14包括2组位置传感器141,一组位置传感器141对应一个左传动轴155,2组位置传感器141设置在罩壳104内左侧的连接杆件105上,位置传感器垂直于光伏板,且位置传感器141沿连接杆件105的轴线分布,用于实时探测光伏板2的金属边框得
到时间反馈,从而实现对光伏组件纠偏型智能清扫机器人运行时的偏移量的探测。
49.其中,所述光伏组件纠偏型智能清扫机器人的运行方向垂直于长方形整体结构的长边。
50.具体的,每组位置传感器141包括2个位置传感器,且2个位置传感器分别为第一传感器3和第二传感器4,第一传感器3处于第二传感器4的下部。
51.如图1至图3,所述电源组件13包括蓄电池131和车载太阳能板132。车载太阳能板132设置在罩壳104上对应远离光伏板2的一面。蓄电池131设置在罩壳104内。蓄电池131与车载太阳能板132相连。蓄电池131分别与左驱动电机151、右驱动电机161、导向驱动电机111、清扫电机121和位置传感器141相连。
52.具体的,控制组件分别与左驱动电机151、右驱动电机161、导向驱动电机111、清扫电机121和位置传感器141相连。
53.具体的,所述上部模块101包括上部支架,左驱动电机151设于上部支架上,导向驱动电机111设置在上部支架上。
54.具体的:所述下部模块103包括下部支架,右驱动电机161设于下部支架上,清扫电机121设置在下部支架上。
55.具体的,所述中间模块102包括中间安装架,用于为左驱动组件15、右驱动组件16和清扫组件12提供中间支撑。
56.一种上述的光伏组件纠偏型智能清扫机器人的控制方法,如图8,包括以下步骤:1)手动或控制组件自动控制同时开启左驱动电机151、右驱动电机161、导向驱动电机111、清扫电机121和位置传感器141,且开启时左驱动电机151的运转速度与右驱动电机161的运转速度一致,开启后光伏组件纠偏型智能清扫机器人在光伏板2上运行和清扫。
57.2)控制组件根据第一位置传感器3和第二位置传感器4分别探测光伏板2的金属边框并分别得到时间反馈t1和t2,并将t1和t2反馈给控制组件。
58.3)控制组件判断是否t1=t2,当t1=t2时,控制组件始终控制右驱动电机16的运转速度与左驱动电机15的运转速度一致后进入步骤6);否则即t1≠t2时,进入步骤4)。
59.4)控制组件判断是否t1<t2,当t1<t2时,控制组件控制右驱动电机161减速后返回步骤3);否则进入步骤5)。
60.5)t1>t2,控制组件控制右驱动电机161加速后返回步骤3)。
61.6)控制组件判断清扫工作是否全部完成;当光伏组件纠偏型智能清扫机器人清扫完所有的光伏板2后,进入步骤7);否则返回步骤3)。
62.7)手动或控制组件自动控制同时关闭左驱动电机151、右驱动电机161、导向驱动电机111、清扫电机121和位置传感器141。
63.8)工作结束。
64.本发明的工作原理及其工作过程电源组件13利用车载太阳能板132对蓄电池131充电,为整个机器人停供电力。左驱动组件15与右驱动组件16结构一致,正常状态下两者同步运转驱动本发明机器人行进。导向驱动电机111的输出扭矩通过导向同步轮112和导向同步带113传递给导向滚轮115,导向轮组件11的导向驱动电机111驱动导向滚轮115紧贴光伏板2边缘运行,而且导向滚轮115
的线速度恒等于左驱动组件15的最上部的那个左滚轮154的线速度。清扫组件12的清扫电机121驱动清扫滚筒刷124对光伏板2表面进行除尘清扫。测量组件14实时探测光伏板2的金属边框得到时间反馈,从而实现对光伏组件纠偏型智能清扫机器人运行时的偏移量的探测,控制组件将测量组件反馈的偏移量信息来调整右驱动组件16的运转速度,将长方形机器人的长边保持垂直于机器人运行的方向。
65.本发明仅有最上部的那个左滚轮154与左传动轴155固定设置,其他的左滚轮154与左传动轴165活动设置;也仅有最下部的那个右滚轮164与右传动轴165固定设置,其他的右滚轮164与右传动轴165活动设置;该设计使得左驱动电机151将扭矩只能传递给最上部的那个左滚轮154,右驱动电机161将扭矩也只能传递给最下部的右滚轮164;因此当右驱动电机161进行减速或加速时,不会发生打滑现象。
66.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
67.本发明所述的实施例仅仅是对本发明的优选实施方式进行的描述,并非对本发明构思和范围进行限定,在不脱离本发明设计思想的前提下,本领域中工程技术人员对本发明的技术方案做出的各种变型和改进,均应落入本发明的保护范围,本发明请求保护的技术内容,已经全部记载在权利要求书中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1