一种低振动噪声SVPWM过调制方法与流程
一种低振动噪声svpwm过调制方法
技术领域
1.本发明属于电力电子与电力传动领域,具体涉及一种低振动噪声svpwm过调制方法,适于对振动噪声有严格要求的svpwm过调制场所,特别适用于采用永磁同步电机驱动的船舶综合电力系统领域。
背景技术:
2.随着永磁、合金等材料性能的不断提高和先进控制理论的发展,永磁同步等高效电机在以其功率因数、效率等优点在电动汽车、风力发电、船舶等电能转换领域广泛应用。随着竞争日益白热化,运行效率、振动噪声等指标成为决定设备成功与否的重要因素。
3.svpwm过调制控制可以调高电能变换模块输出的基波电压,为永磁同步电机等设备的运行控制提供更高的自由度,受到国内外学者广泛的关注和研究。目前主要研究方向在于过调制控制下最小相位误差、幅值误差和分量误差的改进优化,以及多电平、多相输出等非典型拓扑下的过调制研究。然而,现有的svpwm 过调制控制有以下缺点:
4.1)低频段谐波含量丰富,基频特征频次分量可通过谐振等谐波控制策略抑制,但其它频次低频谐波分量目前尚无有效抑制措施。
5.2)输出电压基波幅值(调制比)的给定和反馈为非线性关系,无法保证控制系统在线性调制区与过调制区域性能的一致性。
技术实现要素:
6.发明目的是针对以上问题,提出一种简单可靠且适于工程应用的低振动噪声svpwm过调制方法。
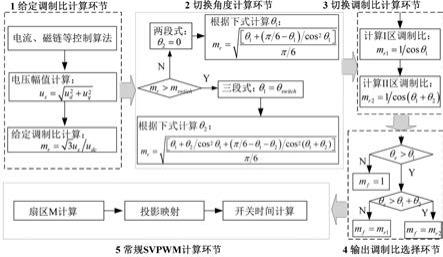
7.本发明解决其技术问题所采用的技术方案是:一种低振动噪声svpwm过调制方法,用于整流器或逆变器等电能变换模块,基于顺序连接的给定调制比计算环节、切换角度计算环节、切换调制比计算环节、输出调制比选择环节和常规svpwm计算环节组成的调制系统,步骤为
8.步骤1,根据交直轴电压给定,通过给定调制比计算环节计算当前母线电压下的给定调制比mr:
9.步骤1.1,通过电流、磁链等控制算法,得到给定的直轴电压分量ud和交轴电压分量uq;
10.步骤1.2,计算给定电压幅值
11.步骤1.3,根据当前母线电压u
dc
计算给定调制比
12.步骤2,根据给定调制比mr,通过切换角度计算环节计算发出调制比的切换角度θ1和θ2;
13.步骤3,根据调制比切换角度,通过切换调制比计算环节计算不同区域内的实际调制比m
r1
和m
r2
;
14.步骤4,根据当前需要磁场角度θe,通过输出调制比选择环节选择实际调制比给定mf;
15.步骤5,根据实际调制比给定mf,运用冲量守恒定律,通过常规svpwm计算环节计算开关管驱动信号。
16.进一步,所述的步骤2具体包括:
17.步骤2.1,判断给定调制比mr与预先设置的切换电压调制比m
swtich
的大小,若 mr>m
swtich
,则执行步骤2.2,否则执行步骤2.3;
18.步骤2.2,设定i区和ii区为根据给定调制比mr重新划分的扇区,设定i 区切换角度θ1=θ
switch
,其中θ
switch
为预先设置的区域切换角度,进而根据下式计算ii区切换角度θ2,然后转至步骤3:
[0019][0020]
步骤2.3,设置ii区切换角度θ2=0,进而根据下式计算i区切换角度θ1:
[0021][0022]
更进一步,所述的步骤3中,根据i区切换角度θ1和ii区切换角度θ2,分别计算i区给定调制比m
r1
=1/cosθ1和ii区给定调制比m
r2
=1/cos(θ1+θ2)。
[0023]
再进一步,所述的步骤4中根据需要的磁场角度θe选择当前所需的实际调制比给定mf:当θe≤θ1时mf=1;当θ1<θe≤θ1+θ2时mf=m
r1
;当θe>θ1+θ2时mf=m
r2
。
[0024]
本发明的有益效果是:通过切换不同区域内的电压调制比,在仅增加特定电频率谐波分量,保持输出电压基波幅值给定和反馈的线性关系基础上,实现了svpwm的过调制。
[0025]
本发明调制方法可降低svpwm过调制下的振动噪声,适用于永磁同步电机等过调制控制且对低频振动噪声要求严格的轨道交通、船用推进领域。
附图说明
[0026]
图1是本发明调制系统的结构示意图;
[0027]
图2是本发明实施例2对应的svpwm矢量图;
[0028]
图3是本发明实施例2中θ
switch
=0.2838时,调制比与切换角度θ1/θ2的映射对应图。
[0029]
各附图标记为:1—给定调制比计算环节,2—切换角度计算环节,3—切换调制比计算环节,4—输出调制比选择环节,5—常规svpwm计算环节。
具体实施方式
[0030]
下面结合附图和实施例对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。
[0031]
实施例1
[0032]
参照图1所示,作为第一实施例,本发明公开了一种低振动噪声svpwm过调制方法,用于整流器或逆变器等电能变换模块,基于由顺序连接的给定调制比计算环节1、切换角度计算环节2、切换调制比计算环节3、输出调制比选择环节4和常规svpwm计算环节5组成的控
制系统,其中调制方法包括以下步骤:
[0033]
步骤1,根据交直轴电压给定,计算当前母线电压下的给定调制比mr。
[0034]
具体包括:
[0035]
步骤1.1,通过电流、磁链等控制算法,得到给定的直轴电压分量ud和交轴电压分量uq。
[0036]
步骤1.2,计算给定电压幅值
[0037]
步骤1.3,根据当前母线电压u
dc
计算给定调制比
[0038]
步骤2,根据给定调制比mr,通过切换角度计算环节2计算发出调制比的切换角度θ1和θ2。
[0039]
具体包括:
[0040]
步骤2.1,判断给定调制比mr与切换电压调制比m
swtich
的大小,其中m
swtich
为预先设置的切换电压调制比,若mr>m
swtich
,则执行步骤2.2,否则执行步骤2.3。
[0041]
步骤2.2,如图2所示,i区和ii区为根据给定调制比mr重新划分的扇区,设置切换角度θ1=θ
switch
,其中θ
switch
为预先设置的区域切换角度,进而根据下式计算θ2,然后转至步骤3。
[0042][0043]
步骤2.3,设置ii区切换角度θ2=0,进而根据下式计算i区切换角度θ1:
[0044][0045]
为避免数字控制内部复杂的运算,减少运算时间,在步骤2.2和步骤2.3中,可采用查表法,预先在芯片中存储调制比mr与角度θ1和θ2的映射表。
[0046]
步骤3,根据切换角度θ1和θ2,分别计算i区调制比m
r1
=1/cosθ1和ii区调制比m
r2
=1/cos(θ1+θ2)。
[0047]
步骤4,根据需要的磁场角度θe,选择判断当前所需的电压调制比mf,如图2红色标注所示。若θe≤θ1时,mf=1;当θ1<θe≤θ1+θ2时,mf=m
r1
;当θe>θ1+θ2时,mf=m
r2
。
[0048]
需要说明的是,由于采用投影映射,只对i区区内的过调制情况进行判断即可。
[0049]
步骤5,根据调制比给定,运用冲量守恒定律,计算开关管驱动信号。
[0050]
实施例2
[0051]
如图3所示,以一台三相永磁同步电机矢量控制系统为例具体说明该控制方法的实施方式。该电机额定功率87kw,额定相电压有效值268v,额定转速 810r/min。
[0052]
步骤1,根据交直轴电压给定,计算当前母线电压下的给定调制比mr,具体包括:
[0053]
步骤1.1,通过电流、磁链等控制算法,得到给定的直轴电压分量ud=-14v和交轴电压分量uq=269.5v;
[0054]
步骤1.2,计算给定电压幅值us=269.86v;
[0055]
步骤1.3,计算给定电压调制比mr=1.025,其中u
dc
=456v。
[0056]
步骤2,根据给定调制比mr,计算发出调制比的切换角度θ1和θ2,具体包括:
[0057]
步骤2.1,判断给定电压调制比mr与切换电压调制比m
swtich
的大小,其中m
swtich
=1.0193,mr>m
swtich
,则执行步骤2.2;
[0058]
步骤2.2,设置切换角度θ1=θ
switch
,其中θ
switch
=0.2838,进而计算θ2=0.045,然后转至步骤3。
[0059]
预先在芯片中存储调制比mr与角度θ1和θ2的映射表如图3所示。
[0060]
步骤3,根据切换角度θ1和θ2,分别计算i区调制比m
r1
=1.0417和ii区调制比m
r2
=1.0566。
[0061]
步骤4,根据需要的磁场角度θe=0.315,选择判断当前所需的电压调制比mf。此时,当θ1<θe≤θ1+θ2时,mf=m
r1
。
[0062]
步骤5,需要根据调制比给定,运用冲量守恒定律,计算开关管驱动信号。
[0063]
上述实施例仅例示性说明本发明的原理及其功效,以及部分运用的实施例,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1